 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Planning and Control of Omnidirectional MRAVs for Aerial Communications in Wireless Networks
Apr 21, 2025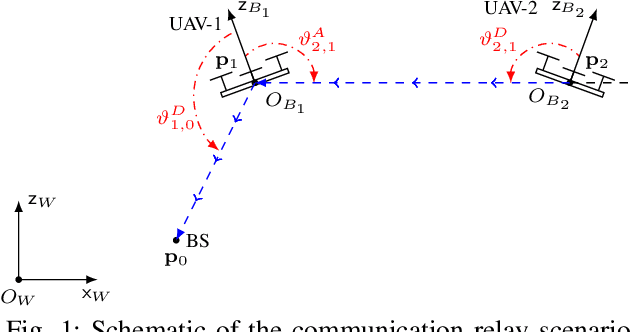
A new class of Multi-Rotor Aerial Vehicles (MRAVs), known as omnidirectional MRAVs (o-MRAVs), has gained attention for their ability to independently control 3D position and orientation. This capability enhances robust planning and control in aerial communication networks, enabling more adaptive trajectory planning and precise antenna alignment without additional mechanical components. These features are particularly valuable in uncertain environments, where disturbances such as wind and interference affect communication stability. This paper examines o-MRAVs in the context of robust aerial network planning, comparing them with the more common under-actuated MRAVs (u-MRAVs). Key applications, including physical layer security, optical communications, and network densification, are highlighted, demonstrating the potential of o-MRAVs to improve reliability and efficiency in dynamic communication scenarios.
Reshaping UAV-Enabled Communications with Omnidirectional Multi-Rotor Aerial Vehicles
Nov 04, 2024



A new class of Multi-Rotor Aerial Vehicles (MRAVs), known as omnidirectional MRAVs (o-MRAVs), has attracted significant interest in the robotics community. These MRAVs have the unique capability of independently controlling their 3D position and 3D orientation. In the context of aerial communication networks, this translates into the ability to control the position and orientation of the antenna mounted on the MRAV without any additional devices tasked for antenna orientation. This additional Degrees of Freedom (DoF) adds a new dimension to aerial communication systems, creating various research opportunities in communications-aware trajectory planning and positioning. This paper presents this new class of MRAVs and discusses use cases in areas such as physical layer security and optical communications. Furthermore, the benefits of these MRAVs are illustrated with realistic simulation scenarios. Finally, new research problems and opportunities introduced by this advanced robotics technology are discussed.
Task Coordination and Trajectory Optimization for Multi-Aerial Systems via Signal Temporal Logic: A Wind Turbine Inspection Study
Oct 09, 2024This paper presents a method for task allocation and trajectory generation in cooperative inspection missions using a fleet of multirotor drones, with a focus on wind turbine inspection. The approach generates safe, feasible flight paths that adhere to time-sensitive constraints and vehicle limitations by formulating an optimization problem based on Signal Temporal Logic (STL) specifications. An event-triggered replanning mechanism addresses unexpected events and delays, while a generalized robustness scoring method incorporates user preferences and minimizes task conflicts. The approach is validated through simulations in MATLAB and Gazebo, as well as field experiments in a mock-up scenario.
Harnessing the Potential of Omnidirectional Multi-Rotor Aerial Vehicles in Cooperative Jamming Against Eavesdropping
Aug 19, 2024



Recent research in communications-aware robotics has been propelled by advancements in 5G and emerging 6G technologies. This field now includes the integration of Multi-Rotor Aerial Vehicles (MRAVs) into cellular networks, with a specific focus on under-actuated MRAVs. These vehicles face challenges in independently controlling position and orientation due to their limited control inputs, which adversely affects communication metrics such as Signal-to-Noise Ratio. In response, a newer class of omnidirectional MRAVs has been developed, which can control both position and orientation simultaneously by tilting their propellers. However, exploiting this capability fully requires sophisticated motion planning techniques. This paper presents a novel application of omnidirectional MRAVs designed to enhance communication security and thwart eavesdropping. It proposes a strategy where one MRAV functions as an aerial Base Station, while another acts as a friendly jammer to secure communications. This study is the first to apply such a strategy to MRAVs in scenarios involving eavesdroppers.
PACNav: Enhancing Collective Navigation for UAV Swarms in Communication-Challenged Environments
Apr 20, 2024This article presents Persistence Administered Collective Navigation (PACNav) as an approach for achieving decentralized collective navigation of Unmanned Aerial Vehicle (UAV) swarms. The technique is inspired by the flocking and collective navigation behavior observed in natural swarms, such as cattle herds, bird flocks, and even large groups of humans. PACNav relies solely on local observations of relative positions of UAVs, making it suitable for large swarms deprived of communication capabilities and external localization systems. We introduce the novel concepts of path persistence and path similarity, which allow each swarm member to analyze the motion of others. PACNav is grounded on two main principles: (1) UAVs with little variation in motion direction exhibit high path persistence and are considered reliable leaders by other UAVs; (2) groups of UAVs that move in a similar direction demonstrate high path similarity, and such groups are assumed to contain a reliable leader. The proposed approach also incorporates a reactive collision avoidance mechanism to prevent collisions with swarm members and environmental obstacles. The method is validated through simulated and real-world experiments conducted in a natural forest.
Gesture-Controlled Aerial Robot Formation for Human-Swarm Interaction in Safety Monitoring Applications
Mar 22, 2024
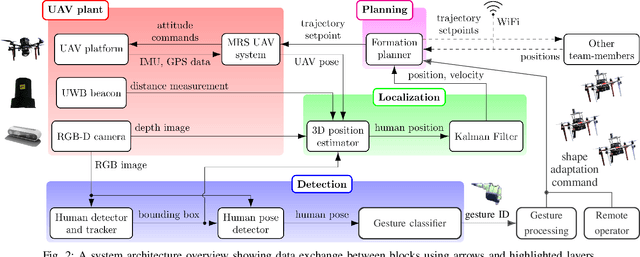
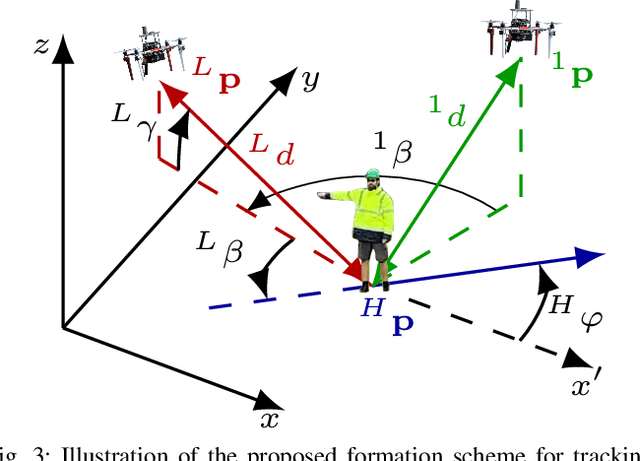
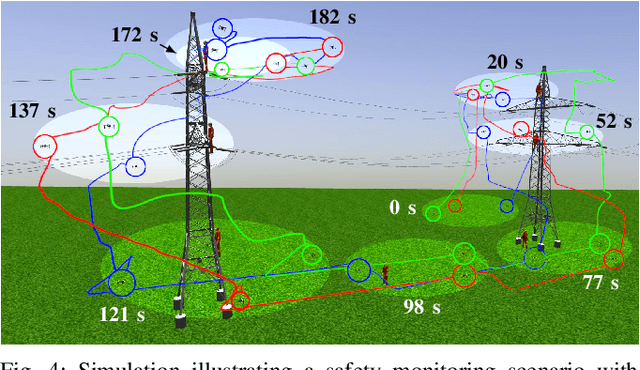
This paper presents a formation control approach for contactless gesture-based Human-Swarm Interaction (HSI) between a team of multi-rotor Unmanned Aerial Vehicles (UAVs) and a human worker. The approach is intended for monitoring the safety of human workers, especially those working at heights. In the proposed dynamic formation scheme, one UAV acts as the leader of the formation and is equipped with sensors for human worker detection and gesture recognition. The follower UAVs maintain a predetermined formation relative to the worker's position, thereby providing additional perspectives of the monitored scene. Hand gestures allow the human worker to specify movements and action commands for the UAV team and initiate other mission-related commands without the need for an additional communication channel or specific markers. Together with a novel unified human detection and tracking algorithm, human pose estimation approach and gesture detection pipeline, the proposed approach forms a first instance of an HSI system incorporating all these modules onboard real-world UAVs. Simulations and field experiments with three UAVs and a human worker in a mock-up scenario showcase the effectiveness and responsiveness of the proposed approach.
Omnidirectional Multi-Rotor Aerial Vehicle Pose Optimization: A Novel Approach to Physical Layer Security
Jan 05, 2024

The integration of Multi-Rotor Aerial Vehicles (MRAVs) into 5G and 6G networks enhances coverage, connectivity, and congestion management. This fosters communication-aware robotics, exploring the interplay between robotics and communications, but also makes the MRAVs susceptible to malicious attacks, such as jamming. One traditional approach to counter these attacks is the use of beamforming on the MRAVs to apply physical layer security techniques. In this paper, we explore pose optimization as an alternative approach to countering jamming attacks on MRAVs. This technique is intended for omnidirectional MRAVs, which are drones capable of independently controlling both their position and orientation, as opposed to the more common underactuated MRAVs whose orientation cannot be controlled independently of their position. In this paper, we consider an omnidirectional MRAV serving as a Base Station (BS) for legitimate ground nodes, under attack by a malicious jammer. We optimize the MRAV pose (i.e., position and orientation) to maximize the minimum Signal-to-Interference-plus-Noise Ratio (SINR) over all legitimate nodes.
Survey of Simulators for Aerial Robots
Nov 04, 2023Uncrewed Aerial Vehicle (UAV) research faces challenges with safety, scalability, costs, and ecological impact when conducting hardware testing. High-fidelity simulators offer a vital solution by replicating real-world conditions to enable the development and evaluation of novel perception and control algorithms. However, the large number of available simulators poses a significant challenge for researchers to determine which simulator best suits their specific use-case, based on each simulator's limitations and customization readiness. This paper analyzes existing UAV simulators and decision factors for their selection, aiming to enhance the efficiency and safety of research endeavors.
Automating Bird Diverter Installation through Multi-Aerial Robots and Signal Temporal Logic Specifications
Sep 19, 2023This paper tackles the task assignment and trajectory generation problem for bird diverter installation using a fleet of multi-rotors. The proposed motion planner considers payload capacity, recharging constraints, and utilizes Signal Temporal Logic (STL) specifications for encoding mission objectives and temporal requirements. An event-based replanning strategy is introduced to handle unexpected failures and ensure operational continuity. An energy minimization term is also employed to implicitly save multi-rotor flight time during installation. Simulations in MATLAB and Gazebo, as well as field experiments, demonstrate the effectiveness and validity of the approach in a mock-up scenario.
A Signal Temporal Logic Planner for Ergonomic Human-Robot Collaboration
Jun 16, 2023



This paper proposes a method for designing human-robot collaboration tasks and generating corresponding trajectories. The method uses high-level specifications, expressed as a Signal Temporal Logic (STL) formula, to automatically synthesize task assignments and trajectories. To illustrate the approach, we focus on a specific task: a multi-rotor aerial vehicle performing object handovers in a power line setting. The motion planner considers limitations, such as payload capacity and recharging constraints, while ensuring that the trajectories are feasible. Additionally, the method enables users to specify robot behaviors that take into account human comfort (e.g., ergonomics, preferences) while using high-level goals and constraints. The approach is validated through numerical analyzes in MATLAB and realistic Gazebo simulations using a mock-up scenario.