 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Aerodynamic Modeling of MetaMorpher: A Hybrid Rotary andFixed-Wing Morphing UAV
Mar 31, 2026In this paper, we present a generalized, comprehensive nonlinear mathematical model and conceptual design for the MetaMorpher, a metamorphic Unmanned Aerial Vehicle (UAV) designed to bridge the gap between vertical takeoff and landing agility and fixed-wing cruising efficiency. Building on the successful design of the spincopter platform, this work introduces a simplified mechanical architecture using lightweight materials and a novel wing-folding strategy. Unlike traditional rigid-body approximations, we derive a nonlinear flight dynamics model that enables arbitrary force distributions across a segmented wing structure. This modularity allows for testing different airfoils, mass distributions, and chord lengths in a single environment. As part of this work, various flight modes were specifically tested and analyzed in the Simulink environment. The results show that the model behaves predictably under different structural configurations, demonstrating its reliability as a tool for rapid design evaluation.
Unlocking Thermal Aerial Imaging: Synthetic Enhancement of UAV Datasets
Jul 09, 2025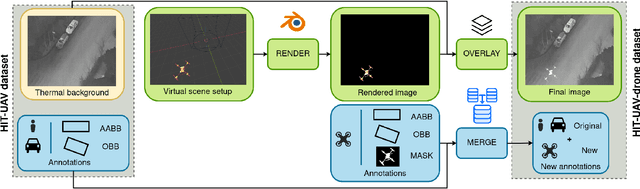
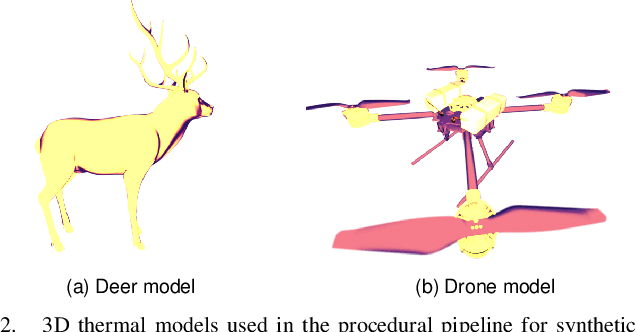
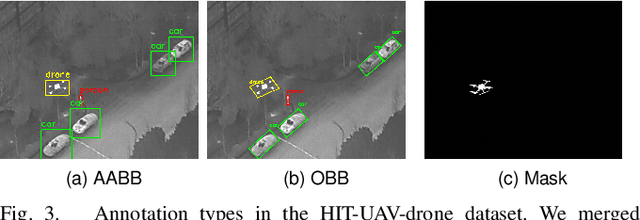
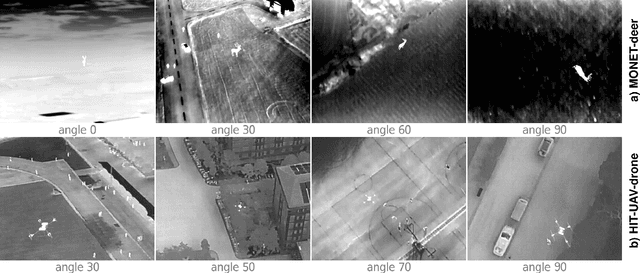
Thermal imaging from unmanned aerial vehicles (UAVs) holds significant potential for applications in search and rescue, wildlife monitoring, and emergency response, especially under low-light or obscured conditions. However, the scarcity of large-scale, diverse thermal aerial datasets limits the advancement of deep learning models in this domain, primarily due to the high cost and logistical challenges of collecting thermal data. In this work, we introduce a novel procedural pipeline for generating synthetic thermal images from an aerial perspective. Our method integrates arbitrary object classes into existing thermal backgrounds by providing control over the position, scale, and orientation of the new objects, while aligning them with the viewpoints of the background. We enhance existing thermal datasets by introducing new object categories, specifically adding a drone class in urban environments to the HIT-UAV dataset and an animal category to the MONET dataset. In evaluating these datasets for object detection task, we showcase strong performance across both new and existing classes, validating the successful expansion into new applications. Through comparative analysis, we show that thermal detectors outperform their visible-light-trained counterparts and highlight the importance of replicating aerial viewing angles. Project page: https://github.com/larics/thermal_aerial_synthetic.
Bio-inspired visual relative localization for large swarms of UAVs
Dec 03, 2024We propose a new approach to visual perception for relative localization of agents within large-scale swarms of UAVs. Inspired by biological perception utilized by schools of sardines, swarms of bees, and other large groups of animals capable of moving in a decentralized yet coherent manner, our method does not rely on detecting individual neighbors by each agent and estimating their relative position, but rather we propose to regress a neighbor density over distance. This allows for a more accurate distance estimation as well as better scalability with respect to the number of neighbors. Additionally, a novel swarm control algorithm is proposed to make it compatible with the new relative localization method. We provide a thorough evaluation of the presented methods and demonstrate that the regressing approach to distance estimation is more robust to varying relative pose of the targets and that it is suitable to be used as the main source of relative localization for swarm stabilization.
Task Coordination and Trajectory Optimization for Multi-Aerial Systems via Signal Temporal Logic: A Wind Turbine Inspection Study
Oct 09, 2024This paper presents a method for task allocation and trajectory generation in cooperative inspection missions using a fleet of multirotor drones, with a focus on wind turbine inspection. The approach generates safe, feasible flight paths that adhere to time-sensitive constraints and vehicle limitations by formulating an optimization problem based on Signal Temporal Logic (STL) specifications. An event-triggered replanning mechanism addresses unexpected events and delays, while a generalized robustness scoring method incorporates user preferences and minimizes task conflicts. The approach is validated through simulations in MATLAB and Gazebo, as well as field experiments in a mock-up scenario.
AERIAL-CORE: AI-Powered Aerial Robots for Inspection and Maintenance of Electrical Power Infrastructures
Jan 04, 2024Large-scale infrastructures are prone to deterioration due to age, environmental influences, and heavy usage. Ensuring their safety through regular inspections and maintenance is crucial to prevent incidents that can significantly affect public safety and the environment. This is especially pertinent in the context of electrical power networks, which, while essential for energy provision, can also be sources of forest fires. Intelligent drones have the potential to revolutionize inspection and maintenance, eliminating the risks for human operators, increasing productivity, reducing inspection time, and improving data collection quality. However, most of the current methods and technologies in aerial robotics have been trialed primarily in indoor testbeds or outdoor settings under strictly controlled conditions, always within the line of sight of human operators. Additionally, these methods and technologies have typically been evaluated in isolation, lacking comprehensive integration. This paper introduces the first autonomous system that combines various innovative aerial robots. This system is designed for extended-range inspections beyond the visual line of sight, features aerial manipulators for maintenance tasks, and includes support mechanisms for human operators working at elevated heights. The paper further discusses the successful validation of this system on numerous electrical power lines, with aerial robots executing flights over 10 kilometers away from their ground control stations.
Design and Validation of a Wireless Drone Docking Station
Sep 11, 2023Drones are increasingly operating autonomously, and the need for extending drone power autonomy is rapidly increasing. One of the most promising solutions to extend drone power autonomy is the use of docking stations to support both landing and recharging of the drone. To this end, we introduce a novel wireless drone docking station with three commercial wireless charging modules. We have developed two independent units, both in mechanical and electrical aspects: the energy transmitting unit and the energy receiving unit. We have also studied the efficiency of wireless power transfer and demonstrated the advantages of connecting three receiver modules connected in series and parallel. We have achieved maximum output power of 96.5 W with a power transfer efficiency of 56.6% for the series connection of coils. Finally, we implemented the system in practice on a drone and tested both energy transfer and landing.
Grabbing power line conductors based on the measurements of the magnetic field strength
Sep 11, 2023



This paper presents the method for the localization and grabbing of the long straight conductor based only on the magnetic field generated by the alternating current flowing through the conductor. The method uses two magnetometers mounted on the robot arm end-effector for localization. This location is then used to determine needed robot movement in order to grab the conductor. The method was tested in the laboratory conditions using the Schunk LWA 4P 6-axis robot arm.
Path Planning with Potential Field-Based Obstacle Avoidance in a 3D Environment by an Unmanned Aerial Vehicle
Jun 28, 2023

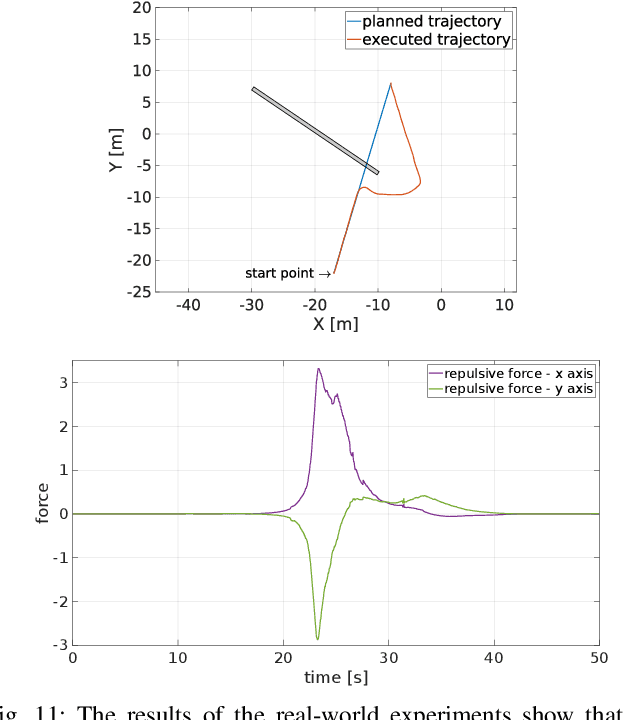
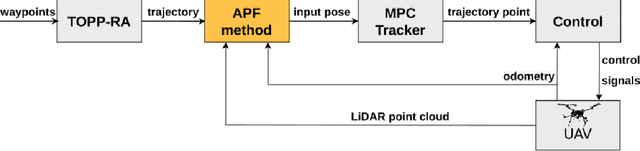
In this paper we address the problem of path planning in an unknown environment with an aerial robot. The main goal is to safely follow the planned trajectory by avoiding obstacles. The proposed approach is suitable for aerial vehicles equipped with 3D sensors, such as LiDARs. It performs obstacle avoidance in real time and on an on-board computer. We present a novel algorithm based on the conventional Artifcial Potential Field (APF) that corrects the planned trajectory to avoid obstacles. To this end, our modifed algorithm uses a rotation-based component to avoid local minima. The smooth trajectory following, achieved with the MPC tracker, allows us to quickly change and re-plan the UAV trajectory. Comparative experiments in simulation have shown that our approach solves local minima problems in trajectory planning and generates more effcient paths to avoid potential collisions with static obstacles compared to the original APF method.
Decentralized Multi-Robot Formation Control Using Reinforcement Learning
Jun 26, 2023This paper presents a decentralized leader-follower multi-robot formation control based on a reinforcement learning (RL) algorithm applied to a swarm of small educational Sphero robots. Since the basic Q-learning method is known to require large memory resources for Q-tables, this work implements the Double Deep Q-Network (DDQN) algorithm, which has achieved excellent results in many robotic problems. To enhance the system behavior, we trained two different DDQN models, one for reaching the formation and the other for maintaining it. The models use a discrete set of robot motions (actions) to adapt the continuous nonlinear system to the discrete nature of RL. The presented approach has been tested in simulation and real experiments which show that the multi-robot system can achieve and maintain a stable formation without the need for complex mathematical models and nonlinear control laws.
Towards Operating Wind Turbine Inspections using a LiDAR-equipped UAV
Jun 26, 2023In this study, a novel technique for the autonomous visual inspection of rotating wind turbine rotor blades utilizing an unmanned aerial vehicle (UAV) was developed. This approach addresses the challenges presented by the dynamic environment at hand and the requirement of maintaining a safe distance from the moving rotor blades. The application of UAV-based inspection techniques mitigates these dangers and the expenses associated with traditional wind turbine inspection methods which involve halting normal wind farm operations. Our proposed system incorporates algorithms and sensor technologies. It relies on a light detection and ranging (LiDAR) sensor system, an inertial measurement unit, and a GPS to accurately identify the relative position of the rotating wind turbine with respect to the UAV's own position. Once this position is determined, a non-destructive visual analysis of the rotating rotor blades is performed by generating a suitable trajectory and triggering a camera fitted on a gimbal system as the blades approach. This new technique, built upon the existing research on UAV inspection of rotating wind turbines, has been empirically validated using data collected from real-world wind farm applications. This article contributes to the ongoing trend of enhancing the safety and efficiency of infrastructure inspection. It also presents a good base for future research, with potential applications for other types of infrastructure, such as bridges or power lines.