 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning with Potential Field-Based Obstacle Avoidance in a 3D Environment by an Unmanned Aerial Vehicle
Jun 28, 2023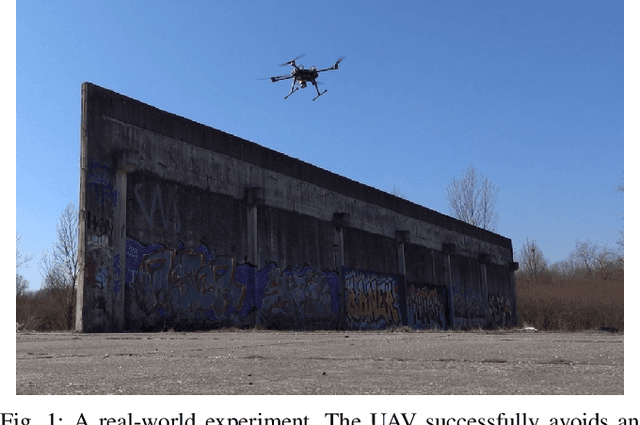

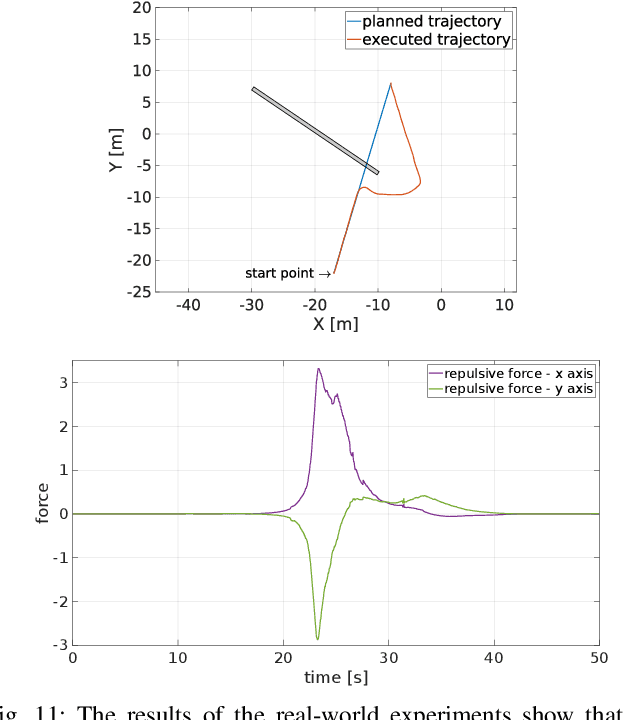
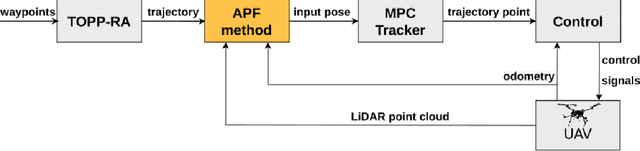
In this paper we address the problem of path planning in an unknown environment with an aerial robot. The main goal is to safely follow the planned trajectory by avoiding obstacles. The proposed approach is suitable for aerial vehicles equipped with 3D sensors, such as LiDARs. It performs obstacle avoidance in real time and on an on-board computer. We present a novel algorithm based on the conventional Artifcial Potential Field (APF) that corrects the planned trajectory to avoid obstacles. To this end, our modifed algorithm uses a rotation-based component to avoid local minima. The smooth trajectory following, achieved with the MPC tracker, allows us to quickly change and re-plan the UAV trajectory. Comparative experiments in simulation have shown that our approach solves local minima problems in trajectory planning and generates more effcient paths to avoid potential collisions with static obstacles compared to the original APF method.
A Shadowcasting-Based Next-Best-View Planner for Autonomous 3D Exploration
Sep 20, 2021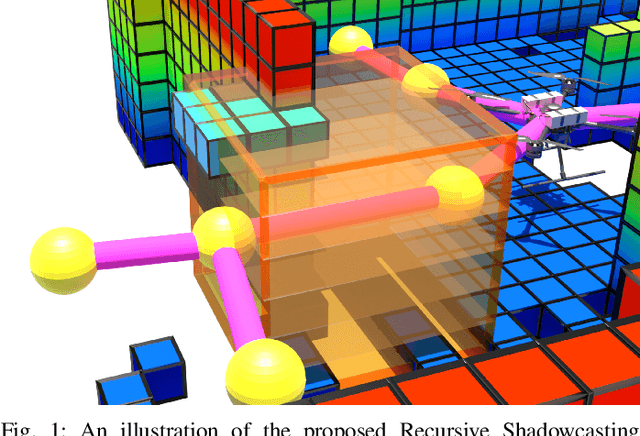
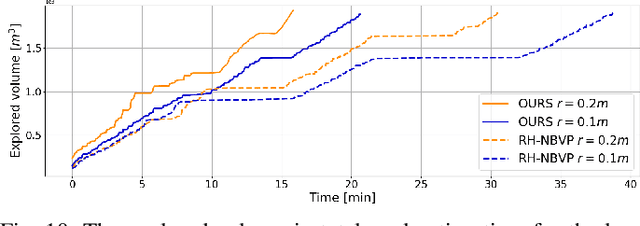
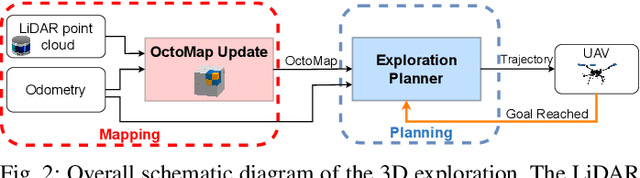
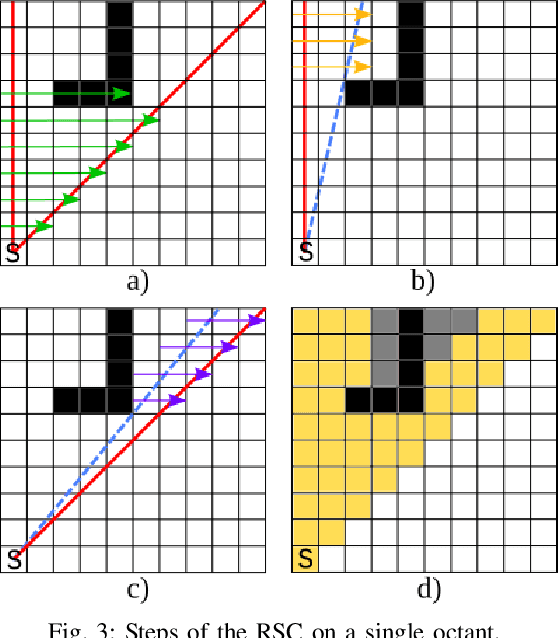
In this paper, we address the problem of autonomous exploration of unknown environments with an aerial robot equipped with a sensory set that produces large point clouds, such as LiDARs. The main goal is to gradually explore an area while planning paths and calculating information gain in short computation time, suitable for implementation on an on-board computer. To this end, we present a planner that randomly samples viewpoints in the environment map. It relies on a novel and efficient gain calculation based on the Recursive Shadowcasting algorithm. To determine the Next-Best-View (NBV), our planner uses a cuboid-based evaluation method that results in an enviably short computation time. To reduce the overall exploration time, we also use a dead end resolving strategy that allows us to quickly recover from dead ends in a challenging environment. Comparative experiments in simulation have shown that our approach outperforms the current state-of-the-art in terms of computational efficiency and total exploration time. The video of our approach can be found at https://www.youtube.com/playlist?list=PLC0C6uwoEQ8ZDhny1VdmFXLeTQOSBibQl.
Flying with Cartographer: Adapting the Cartographer 3D Graph SLAM Stack for UAV Navigation
Jun 04, 2021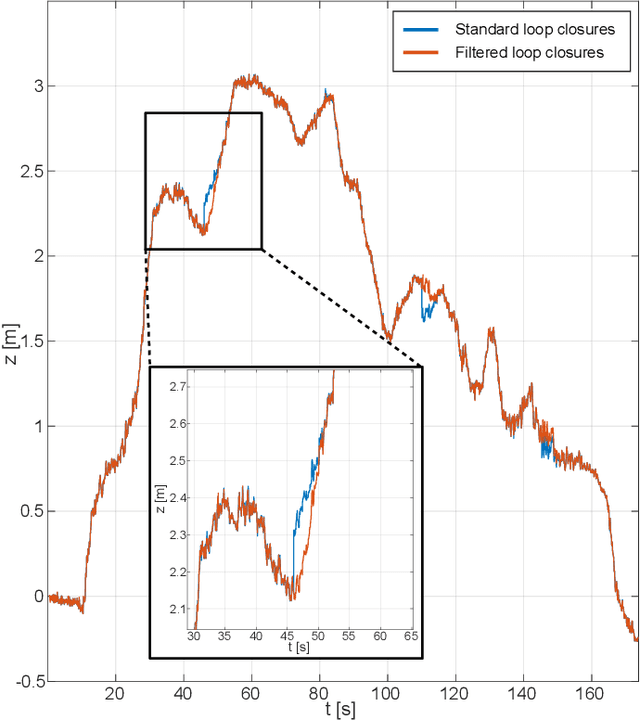
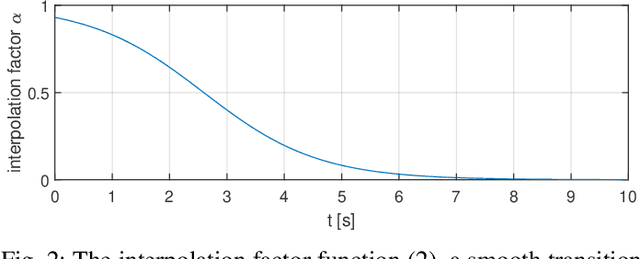
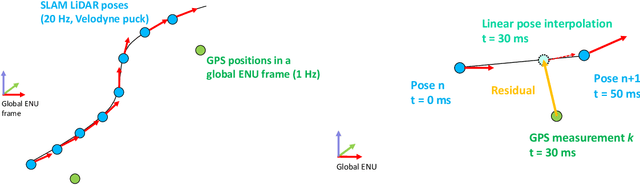
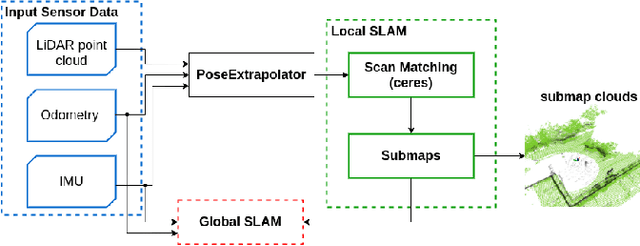
This paper describes an application of the Cartographer graph SLAM stack as a pose sensor in a UAV feedback control loop, with certain application-specific changes in the SLAM stack such as smoothing of the optimized pose. Pose estimation is performed by fusing 3D LiDAR/IMU-based proprioception with GPS position measurements by means of pose graph optimisation. Moreover, partial environment maps built from the LiDAR data (submaps) within the Cartographer SLAM stack are marshalled into OctoMap, an Octree-based voxel map implementation. The OctoMap is further used for navigation tasks such as path planning and obstacle avoidance.