Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlying with Cartographer: Adapting the Cartographer 3D Graph SLAM Stack for UAV Navigation
Jun 04, 2021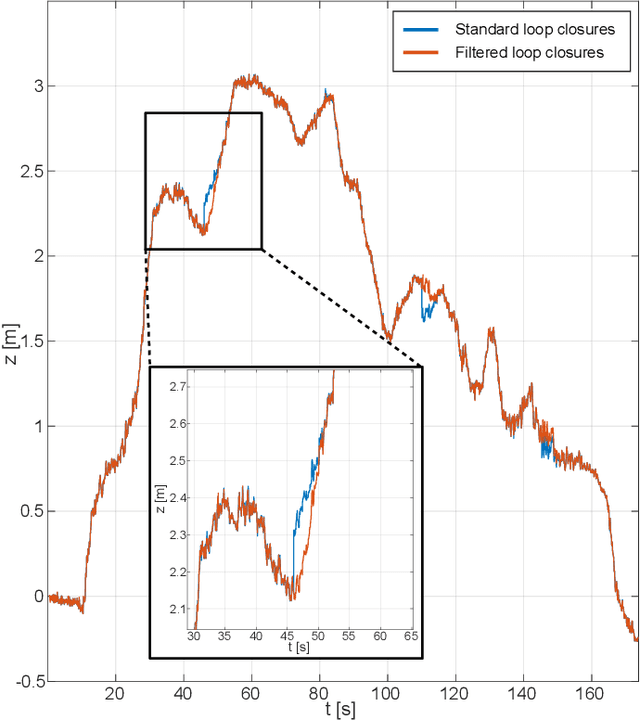
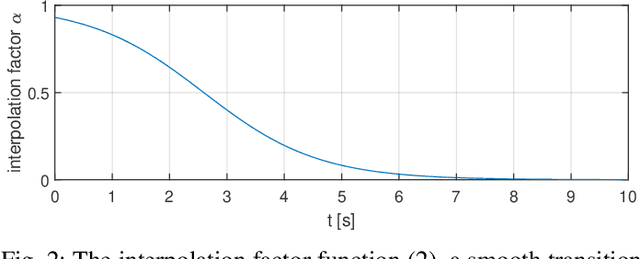
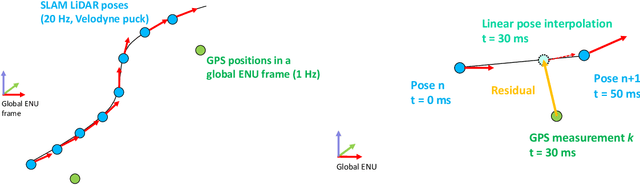
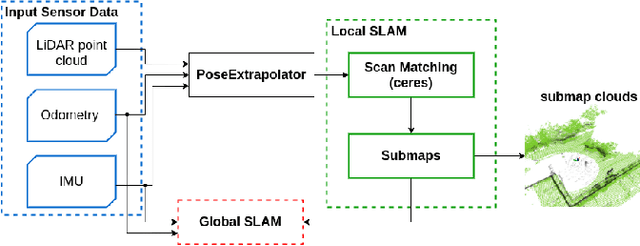
This paper describes an application of the Cartographer graph SLAM stack as a pose sensor in a UAV feedback control loop, with certain application-specific changes in the SLAM stack such as smoothing of the optimized pose. Pose estimation is performed by fusing 3D LiDAR/IMU-based proprioception with GPS position measurements by means of pose graph optimisation. Moreover, partial environment maps built from the LiDAR data (submaps) within the Cartographer SLAM stack are marshalled into OctoMap, an Octree-based voxel map implementation. The OctoMap is further used for navigation tasks such as path planning and obstacle avoidance.
* Submitted to AIRPHARO 2021
Via