 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJSPLIT: A Taxonomy-based Solution for Prompt Bloating in Model Context Protocol
Oct 16, 2025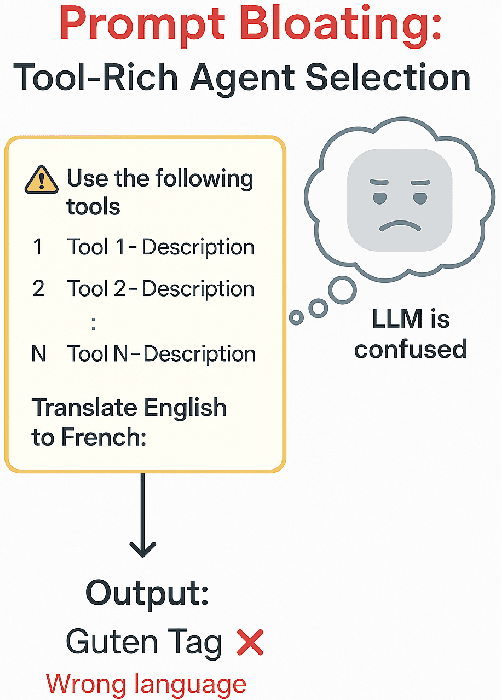
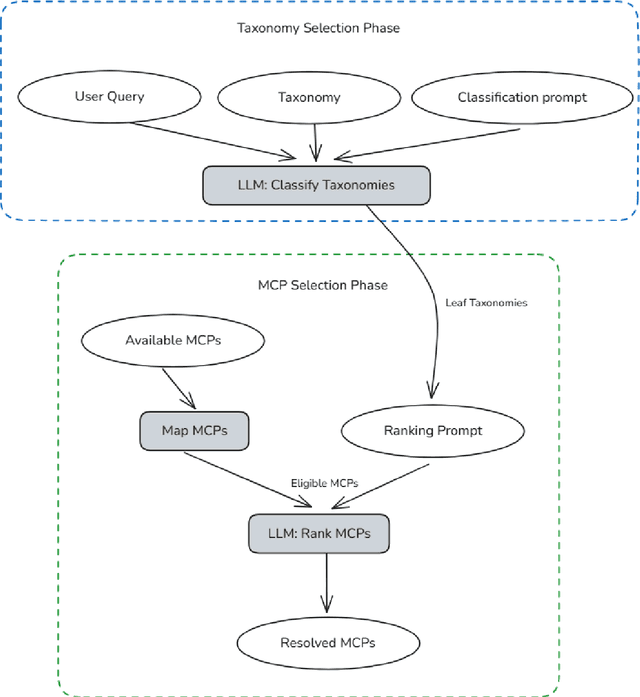
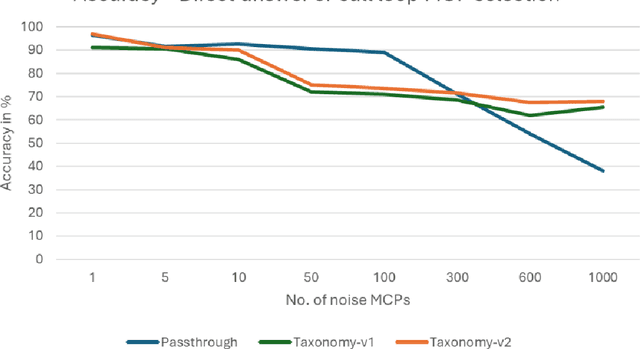
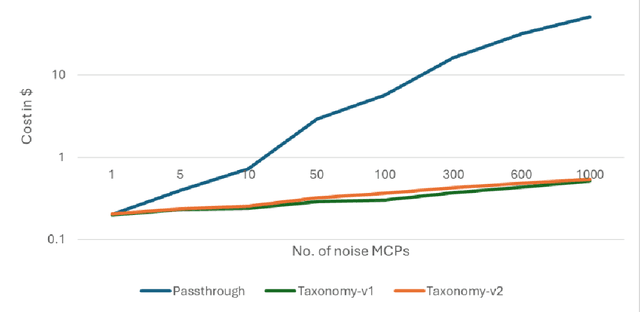
AI systems are continually evolving and advancing, and user expectations are concurrently increasing, with a growing demand for interactions that go beyond simple text-based interaction with Large Language Models (LLMs). Today's applications often require LLMs to interact with external tools, marking a shift toward more complex agentic systems. To support this, standards such as the Model Context Protocol (MCP) have emerged, enabling agents to access tools by including a specification of the capabilities of each tool within the prompt. Although this approach expands what agents can do, it also introduces a growing problem: prompt bloating. As the number of tools increases, the prompts become longer, leading to high prompt token costs, increased latency, and reduced task success resulting from the selection of tools irrelevant to the prompt. To address this issue, we introduce JSPLIT, a taxonomy-driven framework designed to help agents manage prompt size more effectively when using large sets of MCP tools. JSPLIT organizes the tools into a hierarchical taxonomy and uses the user's prompt to identify and include only the most relevant tools, based on both the query and the taxonomy structure. In this paper, we describe the design of the taxonomy, the tool selection algorithm, and the dataset used to evaluate JSPLIT. Our results show that JSPLIT significantly reduces prompt size without significantly compromising the agent's ability to respond effectively. As the number of available tools for the agent grows substantially, JSPLIT even improves the tool selection accuracy of the agent, effectively reducing costs while simultaneously improving task success in high-complexity agent environments.
Path Planning with Potential Field-Based Obstacle Avoidance in a 3D Environment by an Unmanned Aerial Vehicle
Jun 28, 2023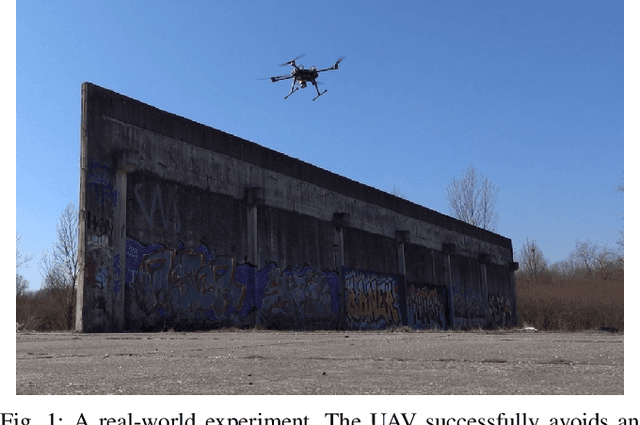

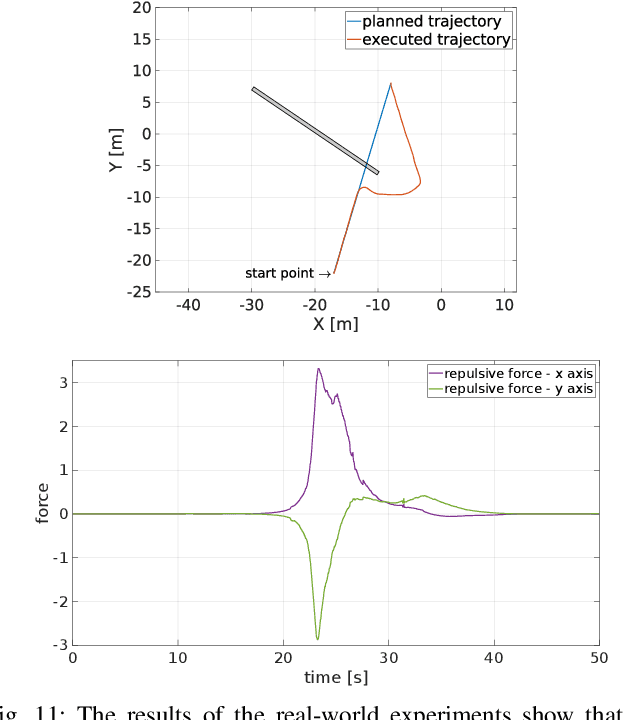
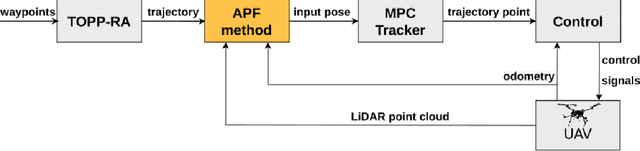
In this paper we address the problem of path planning in an unknown environment with an aerial robot. The main goal is to safely follow the planned trajectory by avoiding obstacles. The proposed approach is suitable for aerial vehicles equipped with 3D sensors, such as LiDARs. It performs obstacle avoidance in real time and on an on-board computer. We present a novel algorithm based on the conventional Artifcial Potential Field (APF) that corrects the planned trajectory to avoid obstacles. To this end, our modifed algorithm uses a rotation-based component to avoid local minima. The smooth trajectory following, achieved with the MPC tracker, allows us to quickly change and re-plan the UAV trajectory. Comparative experiments in simulation have shown that our approach solves local minima problems in trajectory planning and generates more effcient paths to avoid potential collisions with static obstacles compared to the original APF method.
Towards Operating Wind Turbine Inspections using a LiDAR-equipped UAV
Jun 26, 2023In this study, a novel technique for the autonomous visual inspection of rotating wind turbine rotor blades utilizing an unmanned aerial vehicle (UAV) was developed. This approach addresses the challenges presented by the dynamic environment at hand and the requirement of maintaining a safe distance from the moving rotor blades. The application of UAV-based inspection techniques mitigates these dangers and the expenses associated with traditional wind turbine inspection methods which involve halting normal wind farm operations. Our proposed system incorporates algorithms and sensor technologies. It relies on a light detection and ranging (LiDAR) sensor system, an inertial measurement unit, and a GPS to accurately identify the relative position of the rotating wind turbine with respect to the UAV's own position. Once this position is determined, a non-destructive visual analysis of the rotating rotor blades is performed by generating a suitable trajectory and triggering a camera fitted on a gimbal system as the blades approach. This new technique, built upon the existing research on UAV inspection of rotating wind turbines, has been empirically validated using data collected from real-world wind farm applications. This article contributes to the ongoing trend of enhancing the safety and efficiency of infrastructure inspection. It also presents a good base for future research, with potential applications for other types of infrastructure, such as bridges or power lines.
Error State Extended Kalman Filter Multi-Sensor Fusion for Unmanned Aerial Vehicle Localization in GPS and Magnetometer Denied Indoor Environments
Sep 10, 2021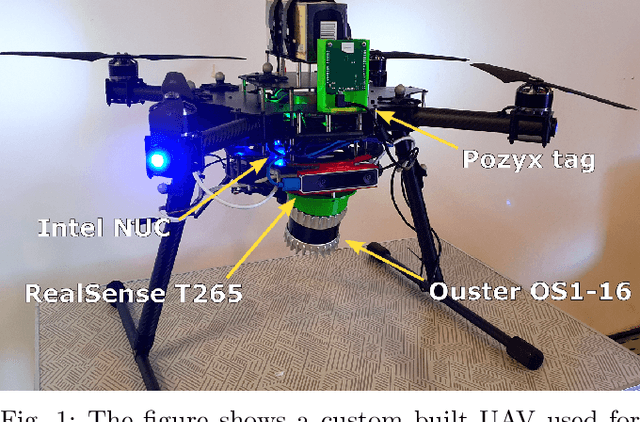
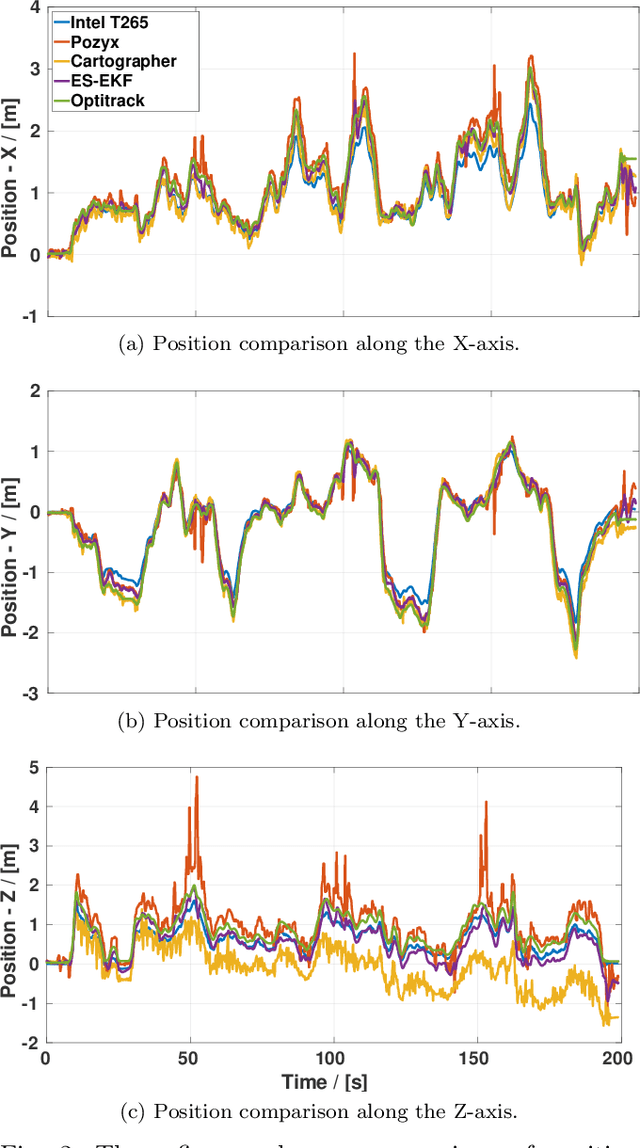
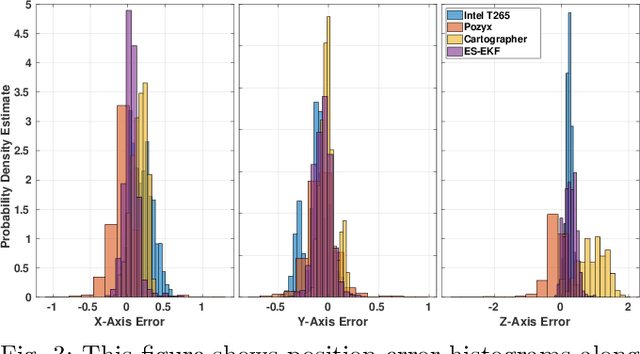
This paper addresses the issues of unmanned aerial vehicle (UAV) indoor navigation, specifically in areas where GPS and magnetometer sensor measurements are unavailable or unreliable. The proposed solution is to use an error state extended Kalman filter (ES -EKF) in the context of multi-sensor fusion. Its implementation is adapted to fuse measurements from multiple sensor sources and the state model is extended to account for sensor drift and possible calibration inaccuracies. Experimental validation is performed by fusing IMU data obtained from the PixHawk 2.1 flight controller with pose measurements from LiDAR Cartographer SLAM, visual odometry provided by the Intel T265 camera and position measurements from the Pozyx UWB indoor positioning system. The estimated odometry from ES-EKF is validated against ground truth data from the Optitrack motion capture system and its use in a position control loop to stabilize the UAV is demonstrated.
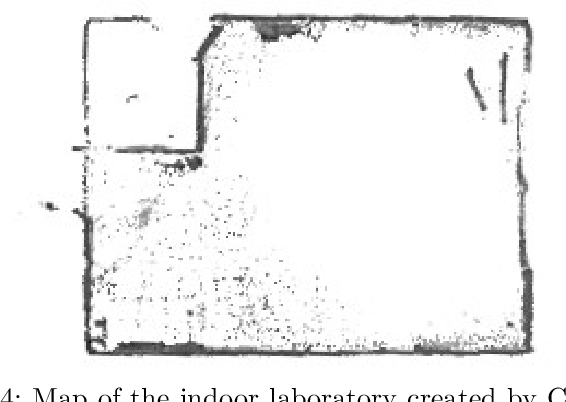
Flying with Cartographer: Adapting the Cartographer 3D Graph SLAM Stack for UAV Navigation
Jun 04, 2021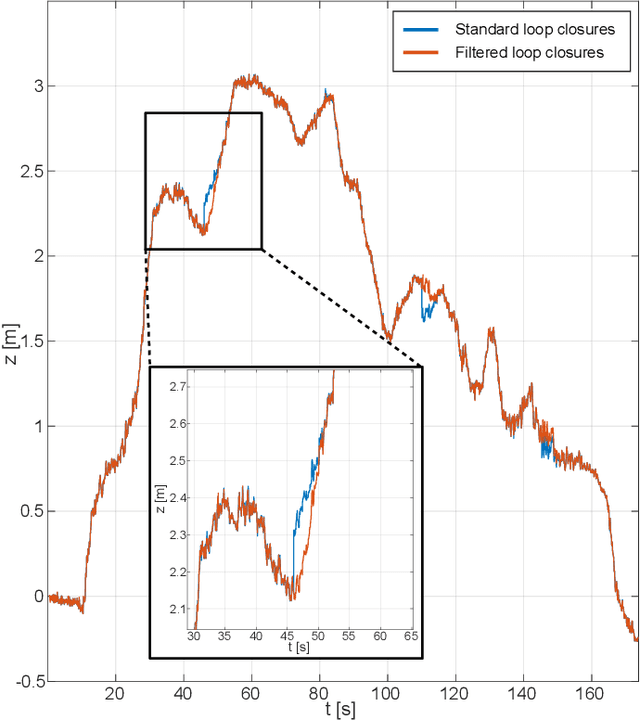
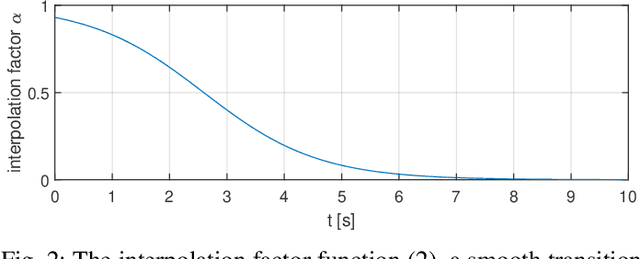
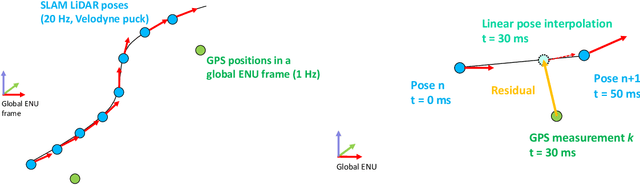
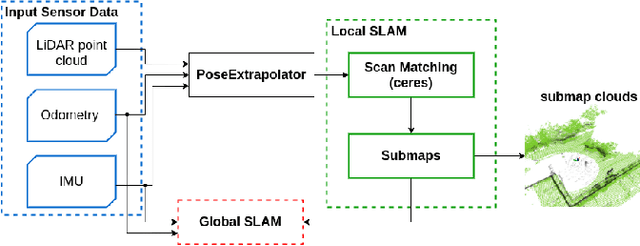
This paper describes an application of the Cartographer graph SLAM stack as a pose sensor in a UAV feedback control loop, with certain application-specific changes in the SLAM stack such as smoothing of the optimized pose. Pose estimation is performed by fusing 3D LiDAR/IMU-based proprioception with GPS position measurements by means of pose graph optimisation. Moreover, partial environment maps built from the LiDAR data (submaps) within the Cartographer SLAM stack are marshalled into OctoMap, an Octree-based voxel map implementation. The OctoMap is further used for navigation tasks such as path planning and obstacle avoidance.
A Comprehensive LiDAR-based SLAM Comparison for Control of Unmanned Aerial Vehicles
Nov 04, 2020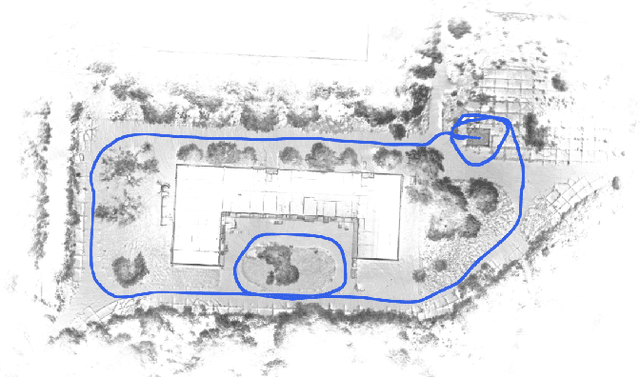

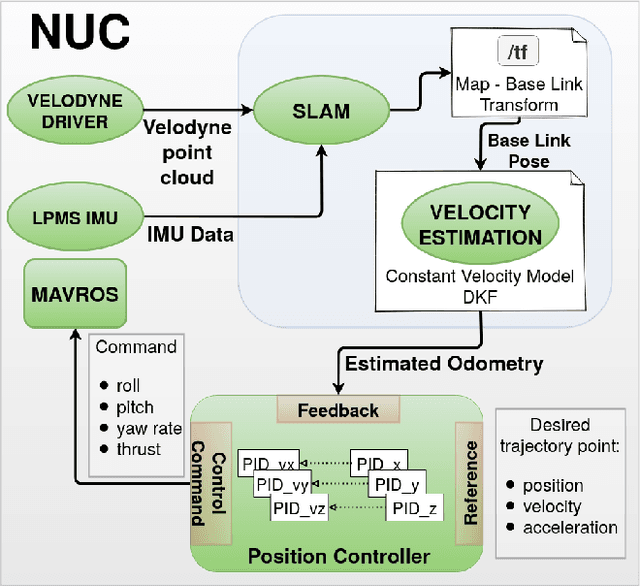
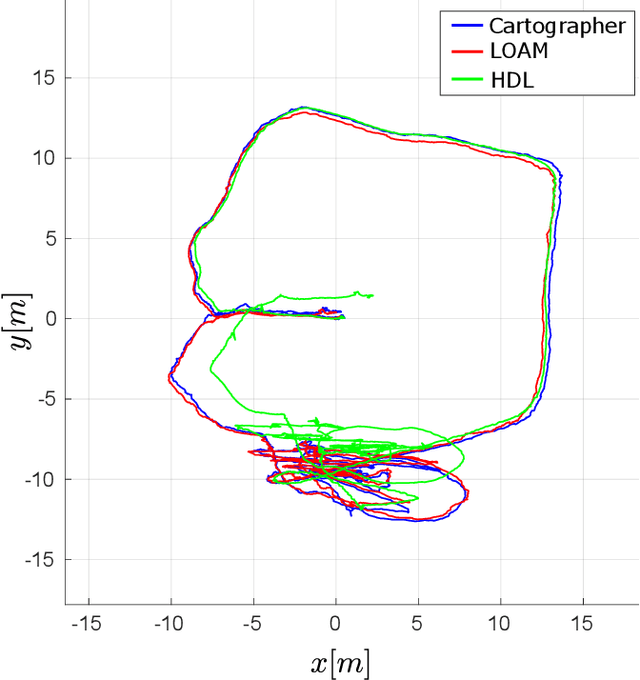
This paper investigates the use of LiDAR SLAM as a pose feedback for autonomous flight. Cartographer, LOAM and hdl graph SLAM are tested for this role. They are first compared offline on a series of datasets to see if they are capable of producing high-quality pose estimations in agile and long-range flight scenarios. The second stage of testing consists of integrating the SLAM algorithms into a cascade PID UAV control system and comparing the control system performance on step excitation signals and helical trajectories. The comparison is based on step response characteristics and several time integral performance criteria as well as the RMS error between planned and executed trajectory.