 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Null Space in Aerial Manipulation through Model-In-The-Loop Motion Planning
Apr 28, 2022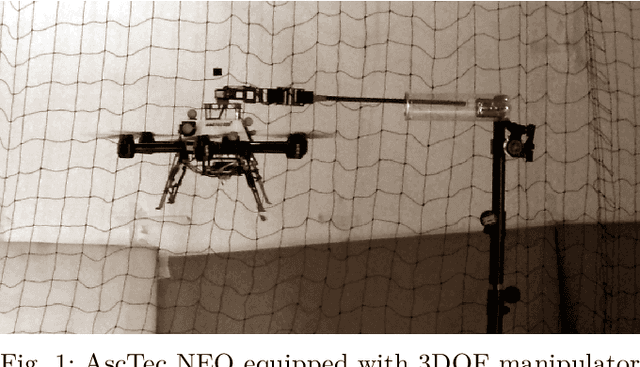
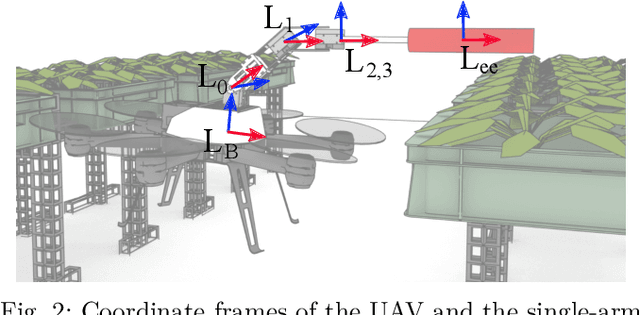
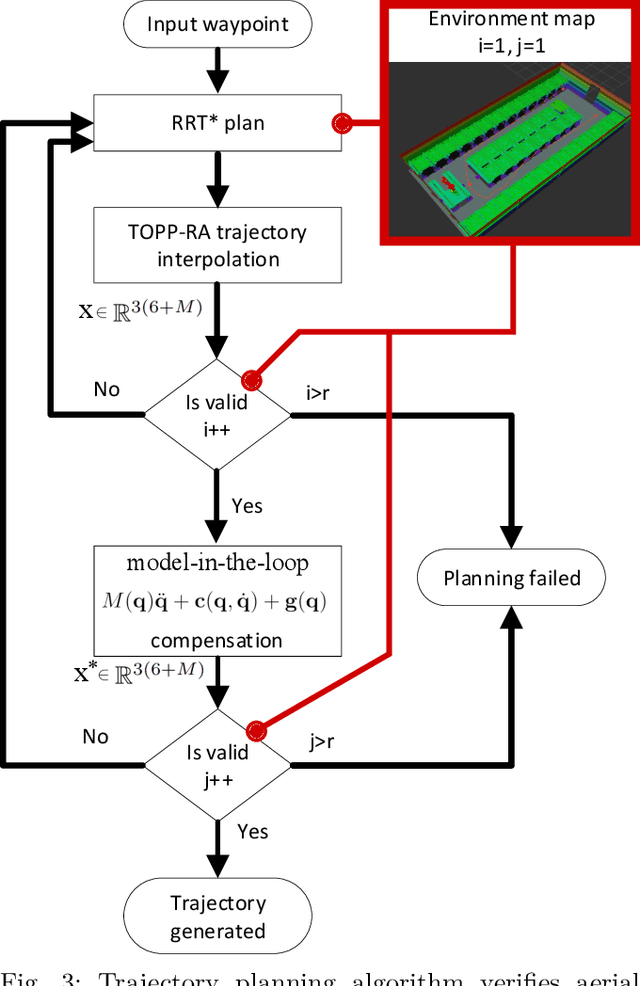
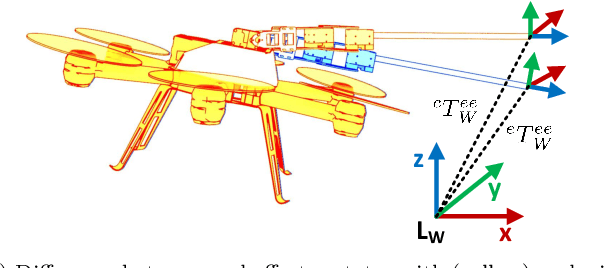
This paper presents a method for aerial manipulator end-effector trajectory tracking by encompassing dynamics of the Unmanned Aerial Vehicle (UAV) and null space of the manipulator attached to it in the motion planning procedure. The proposed method runs in phases. Trajectory planning starts by not accounting for roll and pitch angles of the underactuated UAV system. Next, we propose simulating the dynamics on such a trajectory and obtaining UAV attitude through the model. The full aerial manipulator state obtained in such a manner is further utilized to account for discrepancies in planned and simulated end-effector states. Finally, the end-effector pose is corrected through the null space of the manipulator to match the desired end-effector pose obtained in trajectory planning. Furthermore, we have applied the TOPP-RA approach on the UAV by invoking the differential flatness principle. Finally, we conducted experimental tests to verify effectiveness of the planning framework.
Render-in-the-loop aerial robotics simulator: Case Study on Yield Estimation in Indoor Agriculture
Mar 01, 2022



Inspired by recent promising results in sim-to-real transfer in deep learning we built a realistic simulation environment combining a Robot Operating System (ROS)-compatible physics simulator (Gazebo) with Cycles, the realistic production rendering engine from Blender. The proposed simulator pipeline allows us to simulate near-realistic RGB-D images. To showcase the capabilities of the simulator pipeline we propose a case study that focuses on indoor robotic farming. We developed a solution for sweet pepper yield estimation task. Our approach to yield estimation starts with aerial robotics control and trajectory planning, combined with deep learning-based pepper detection, and a clustering approach for counting fruit. The results of this case study show that we can combine real time dynamic simulation with near realistic rendering capabilities to simulate complex robotic systems.
A Shadowcasting-Based Next-Best-View Planner for Autonomous 3D Exploration
Sep 20, 2021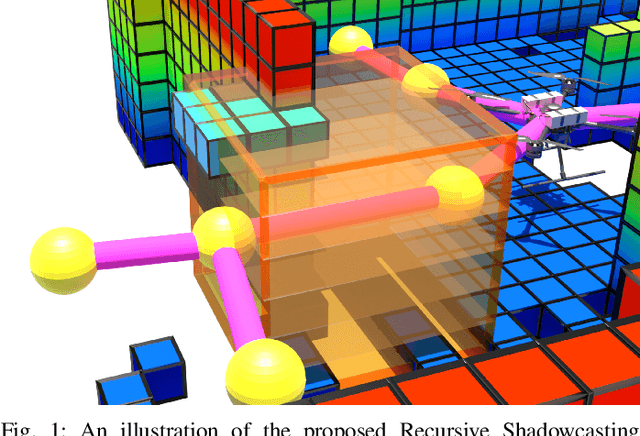
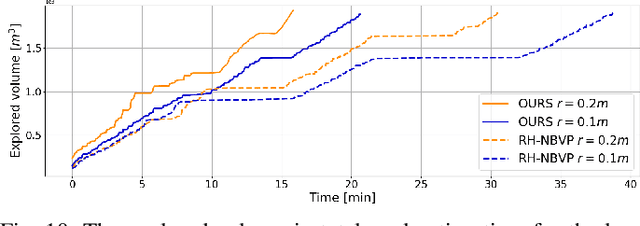
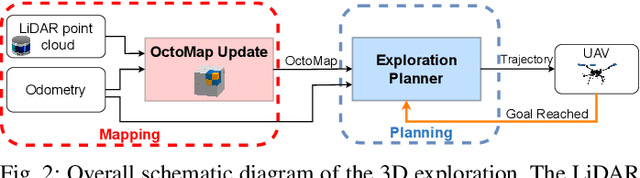
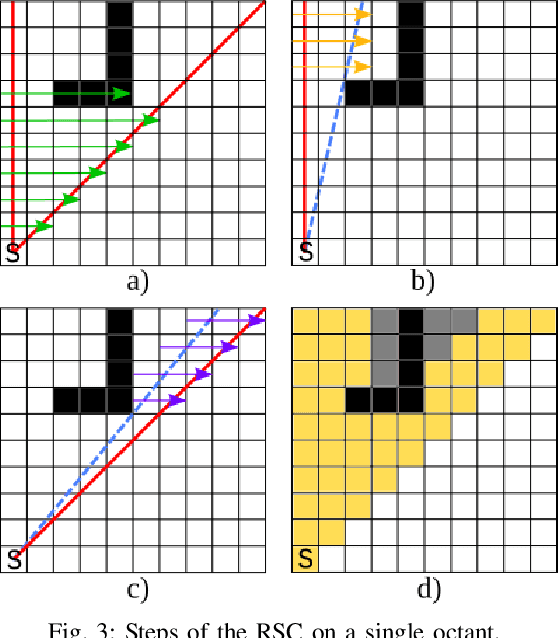
In this paper, we address the problem of autonomous exploration of unknown environments with an aerial robot equipped with a sensory set that produces large point clouds, such as LiDARs. The main goal is to gradually explore an area while planning paths and calculating information gain in short computation time, suitable for implementation on an on-board computer. To this end, we present a planner that randomly samples viewpoints in the environment map. It relies on a novel and efficient gain calculation based on the Recursive Shadowcasting algorithm. To determine the Next-Best-View (NBV), our planner uses a cuboid-based evaluation method that results in an enviably short computation time. To reduce the overall exploration time, we also use a dead end resolving strategy that allows us to quickly recover from dead ends in a challenging environment. Comparative experiments in simulation have shown that our approach outperforms the current state-of-the-art in terms of computational efficiency and total exploration time. The video of our approach can be found at https://www.youtube.com/playlist?list=PLC0C6uwoEQ8ZDhny1VdmFXLeTQOSBibQl.
Flying with Cartographer: Adapting the Cartographer 3D Graph SLAM Stack for UAV Navigation
Jun 04, 2021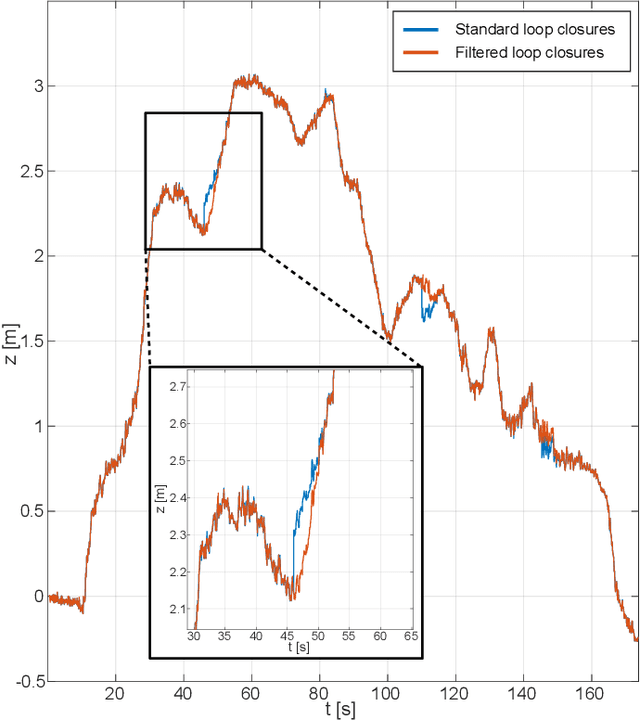
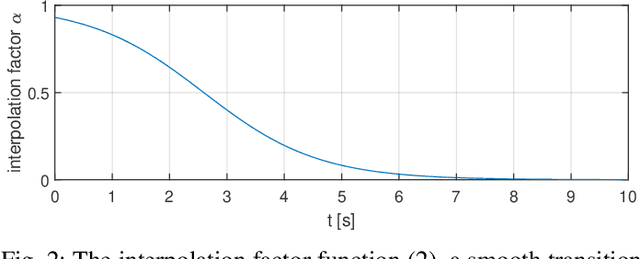
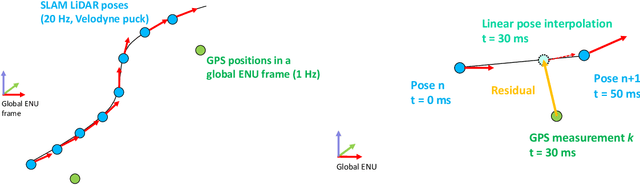
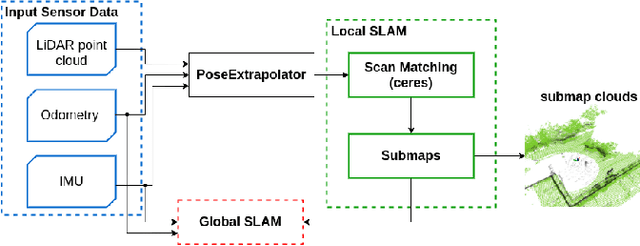
This paper describes an application of the Cartographer graph SLAM stack as a pose sensor in a UAV feedback control loop, with certain application-specific changes in the SLAM stack such as smoothing of the optimized pose. Pose estimation is performed by fusing 3D LiDAR/IMU-based proprioception with GPS position measurements by means of pose graph optimisation. Moreover, partial environment maps built from the LiDAR data (submaps) within the Cartographer SLAM stack are marshalled into OctoMap, an Octree-based voxel map implementation. The OctoMap is further used for navigation tasks such as path planning and obstacle avoidance.
A Comprehensive LiDAR-based SLAM Comparison for Control of Unmanned Aerial Vehicles
Nov 04, 2020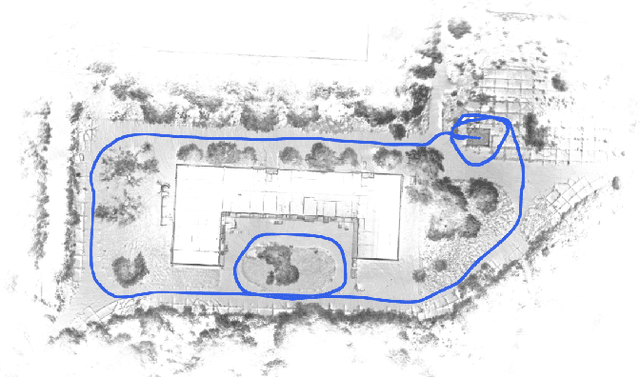

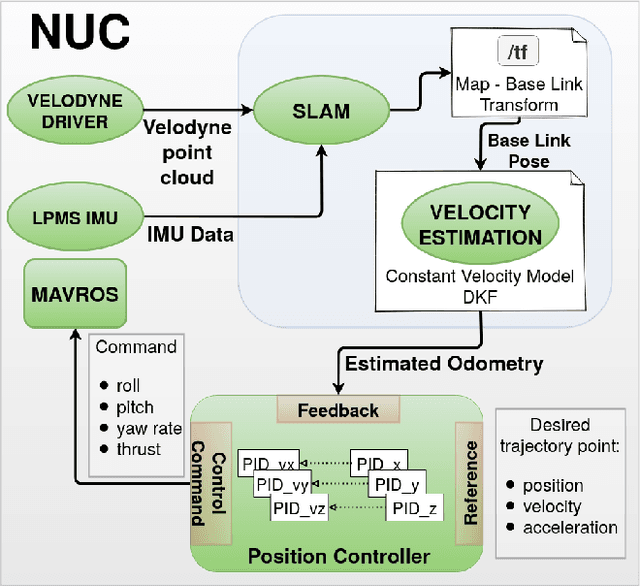
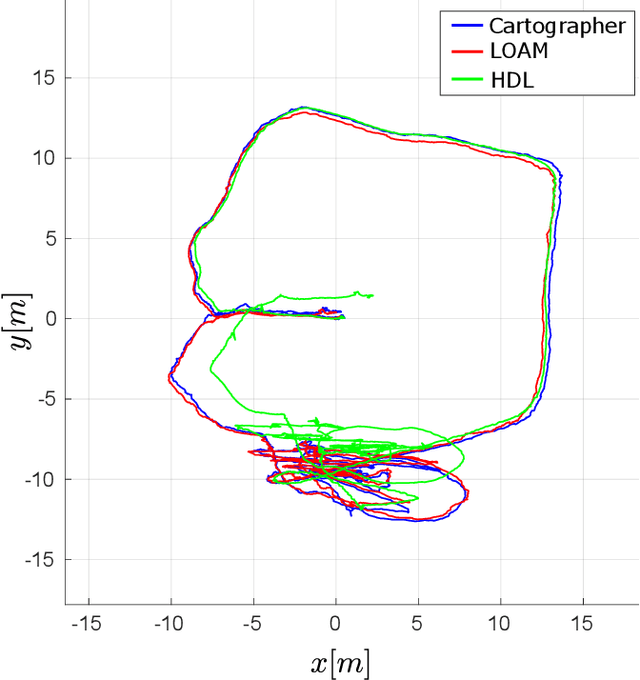
This paper investigates the use of LiDAR SLAM as a pose feedback for autonomous flight. Cartographer, LOAM and hdl graph SLAM are tested for this role. They are first compared offline on a series of datasets to see if they are capable of producing high-quality pose estimations in agile and long-range flight scenarios. The second stage of testing consists of integrating the SLAM algorithms into a cascade PID UAV control system and comparing the control system performance on step excitation signals and helical trajectories. The comparison is based on step response characteristics and several time integral performance criteria as well as the RMS error between planned and executed trajectory.
A Multi-Resolution Frontier-Based Planner for Autonomous 3D Exploration
Nov 04, 2020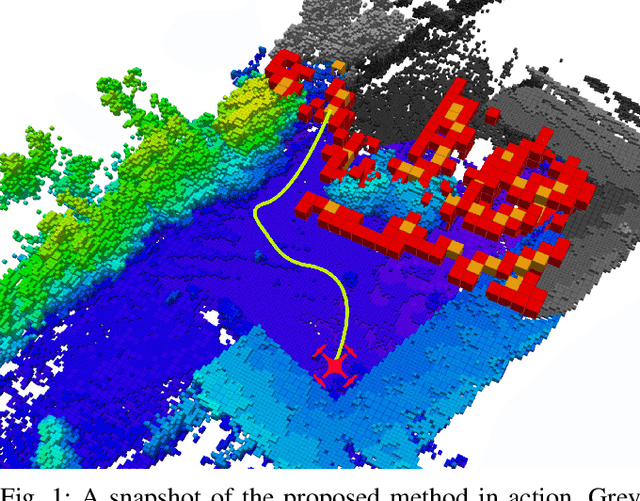
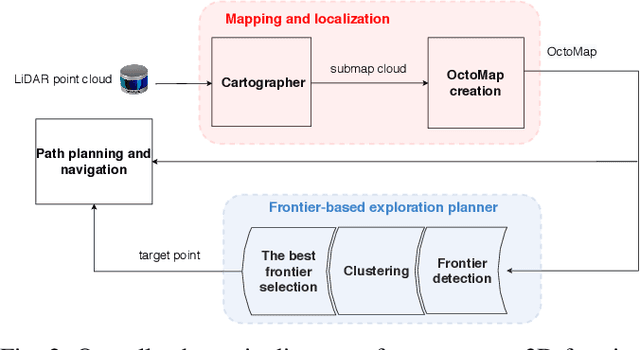
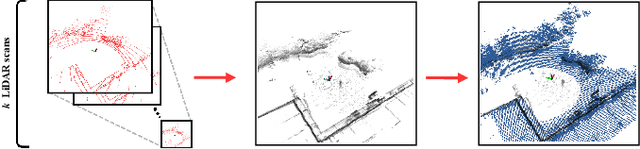
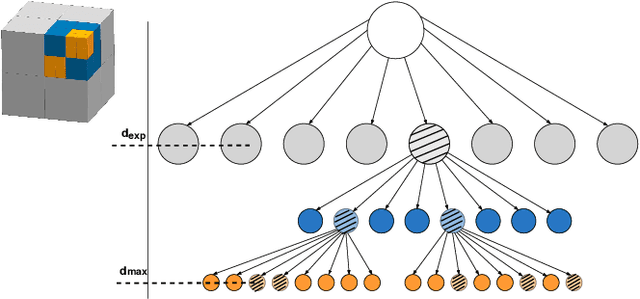
In this paper we propose a planner for 3D exploration that is suitable for applications using state-of-the-art 3D sensors such as lidars, which produce large point clouds with each scan. The planner is based on the detection of a frontier - a boundary between the explored and unknown part of the environment - and consists of the algorithm for detecting frontier points, followed by clustering of frontier points and selecting the best frontier point to be explored. Compared to existing frontier-based approaches, the planner is more scalable, i.e. it requires less time for the same data set size while ensuring similar exploration time. Performance is achieved by not relying on data obtained directly from the 3D sensor, but on data obtained by a mapping algorithm. In order to cluster the frontier points, we use the properties of the Octree environment representation, which allows easy analysis with different resolutions. The planner is tested in the simulation environment and in an outdoor test area with a UAV equipped with a lidar sensor. The results show the advantages of the approach.