 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparative Analysis of Programming by Demonstration Methods: Kinesthetic Teaching vs Human Demonstration
Mar 15, 2024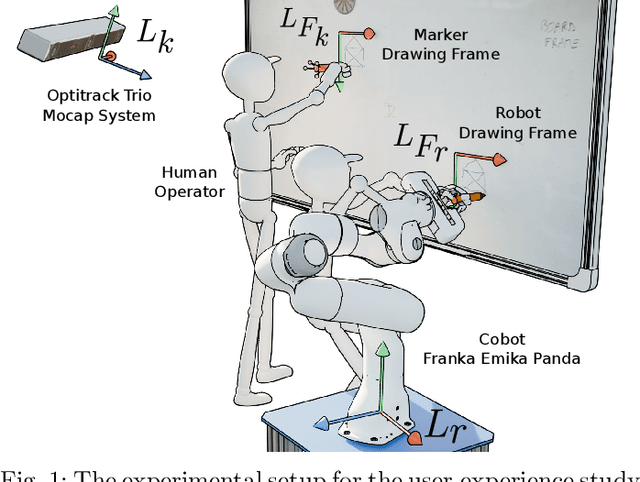



Programming by demonstration (PbD) is a simple and efficient way to program robots without explicit robot programming. PbD enables unskilled operators to easily demonstrate and guide different robots to execute task. In this paper we present comparison of demonstration methods with comprehensive user study. Each participant had to demonstrate drawing simple pattern with human demonstration using virtual marker and kinesthetic teaching with robot manipulator. To evaluate differences between demonstration methods, we conducted user study with 24 participants which filled out NASA raw task load index (rTLX) and system usability scale (SUS). We also evaluated similarity of the executed trajectories to measure difference between demonstrated and ideal trajectory. We concluded study with finding that human demonstration using a virtual marker is on average 8 times faster, superior in terms of quality and imposes 2 times less overall workload than kinesthetic teaching.
Grabbing power line conductors based on the measurements of the magnetic field strength
Sep 11, 2023



This paper presents the method for the localization and grabbing of the long straight conductor based only on the magnetic field generated by the alternating current flowing through the conductor. The method uses two magnetometers mounted on the robot arm end-effector for localization. This location is then used to determine needed robot movement in order to grab the conductor. The method was tested in the laboratory conditions using the Schunk LWA 4P 6-axis robot arm.
Towards Intuitive HMI for UAV Control
Sep 11, 2023



In the last decade, UAVs have become a widely used technology. As they are used by both professionals and amateurs, there is a need to explore different control modalities to make control intuitive and easier, especially for new users. In this work, we compared the most widely used joystick control with a custom human pose control. We used human pose estimation and arm movements to send UAV commands in the same way that operators use their fingers to send joystick commands. Experiments were conducted in a simulation environment with first-person visual feedback. Participants had to traverse the same maze with joystick and human pose control. Participants' subjective experience was assessed using the raw NASA Task Load Index.
Serial Chain Hinge Support for Soft, Robust and Effective Grasp
Nov 14, 2022



This paper presents a serial chain hinge support, a rigid but flexible structure that improves the mechanical performance and robustness of soft-fingered grippers. Gravity can reduce the integrity of soft fingers in horizontal approach, resulting in lower maximum payload caused by a large deflection of fingers. To substantiate our claim we performed several experiments on payload and deflection of the SofIA gripper under both horizontal and vertical approach. In addition, we show that this reinforcement does not impede the original compliant behavior of the gripper, maintaining the original kinematic model functionality. We showcase the proprioceptive and exteroceptive capabilities (RGB-D camera and flex sensor) for two opposing manipulation problems: grasping small and large objects. Finally, we validated the improved SofIA gripper in agricultural and everyday activities.
Exploiting Null Space in Aerial Manipulation through Model-In-The-Loop Motion Planning
Apr 28, 2022
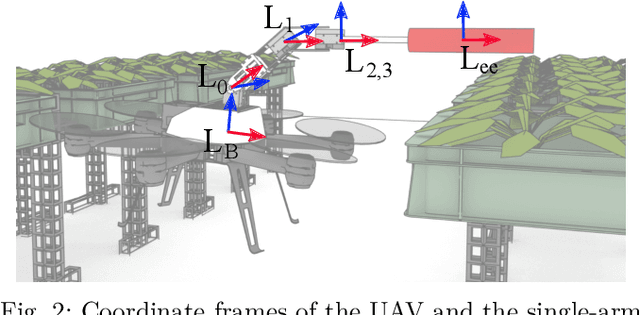
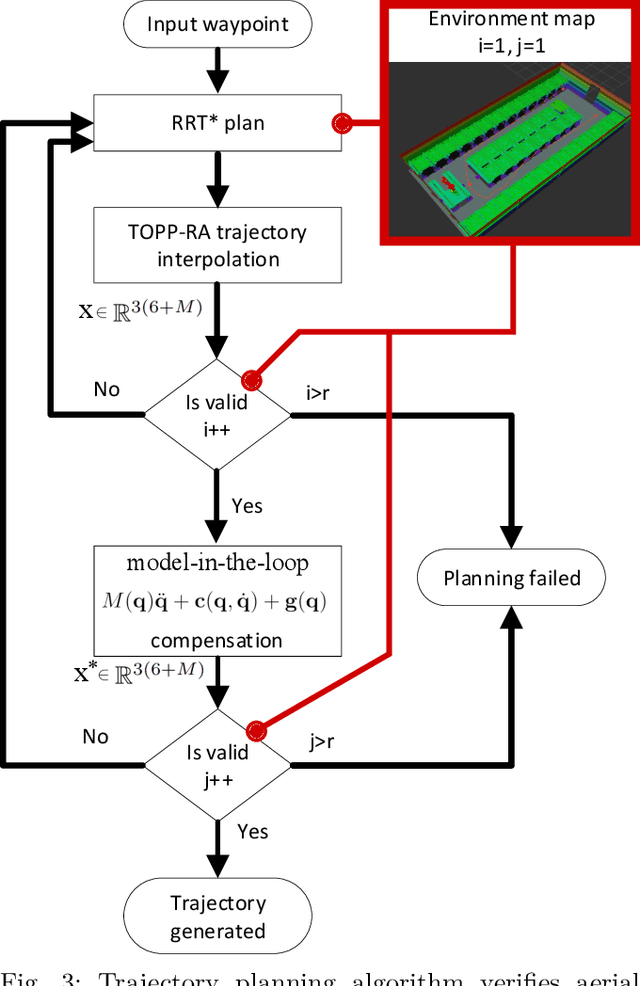
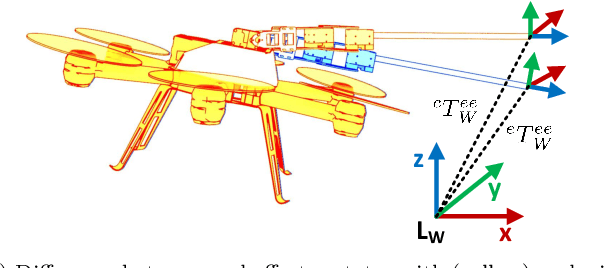
This paper presents a method for aerial manipulator end-effector trajectory tracking by encompassing dynamics of the Unmanned Aerial Vehicle (UAV) and null space of the manipulator attached to it in the motion planning procedure. The proposed method runs in phases. Trajectory planning starts by not accounting for roll and pitch angles of the underactuated UAV system. Next, we propose simulating the dynamics on such a trajectory and obtaining UAV attitude through the model. The full aerial manipulator state obtained in such a manner is further utilized to account for discrepancies in planned and simulated end-effector states. Finally, the end-effector pose is corrected through the null space of the manipulator to match the desired end-effector pose obtained in trajectory planning. Furthermore, we have applied the TOPP-RA approach on the UAV by invoking the differential flatness principle. Finally, we conducted experimental tests to verify effectiveness of the planning framework.
Render-in-the-loop aerial robotics simulator: Case Study on Yield Estimation in Indoor Agriculture
Mar 01, 2022



Inspired by recent promising results in sim-to-real transfer in deep learning we built a realistic simulation environment combining a Robot Operating System (ROS)-compatible physics simulator (Gazebo) with Cycles, the realistic production rendering engine from Blender. The proposed simulator pipeline allows us to simulate near-realistic RGB-D images. To showcase the capabilities of the simulator pipeline we propose a case study that focuses on indoor robotic farming. We developed a solution for sweet pepper yield estimation task. Our approach to yield estimation starts with aerial robotics control and trajectory planning, combined with deep learning-based pepper detection, and a clustering approach for counting fruit. The results of this case study show that we can combine real time dynamic simulation with near realistic rendering capabilities to simulate complex robotic systems.
Autonomous, Mobile Manipulation in a Wall-building Scenario: Team LARICS at MBZIRC 2020
Jan 28, 2022



In this paper we present our hardware design and control approaches for a mobile manipulation platform used in Challenge 2 of the MBZIRC 2020 competition. In this challenge, a team of UAVs and a single UGV collaborate in an autonomous, wall-building scenario, motivated by construction automation and large-scale robotic 3D printing. The robots must be able, autonomously, to detect, manipulate, and transport bricks in an unstructured, outdoor environment. Our control approach is based on a state machine that dictates which controllers are active at each stage of the Challenge. In the first stage our UGV uses visual servoing and local controllers to approach the target object without considering its orientation. The second stage consists of detecting the object's global pose using OpenCV-based processing of RGB-D image and point-cloud data, and calculating an alignment goal within a global map. The map is built with Google Cartographer and is based on onboard LIDAR, IMU, and GPS data. Motion control in the second stage is realized using the ROS Move Base package with Time-Elastic Band trajectory optimization. Visual servo algorithms guide the vehicle in local object-approach movement and the arm in manipulating bricks. To ensure a stable grasp of the brick's magnetic patch, we developed a passively-compliant, electromagnetic gripper with tactile feedback. Our fully-autonomous UGV performed well in Challenge 2 and in post-competition evaluations of its brick pick-and-place algorithms.
Robotic Irrigation Water Management: Estimating Soil Moisture Content by Feel and Appearance
Jan 19, 2022

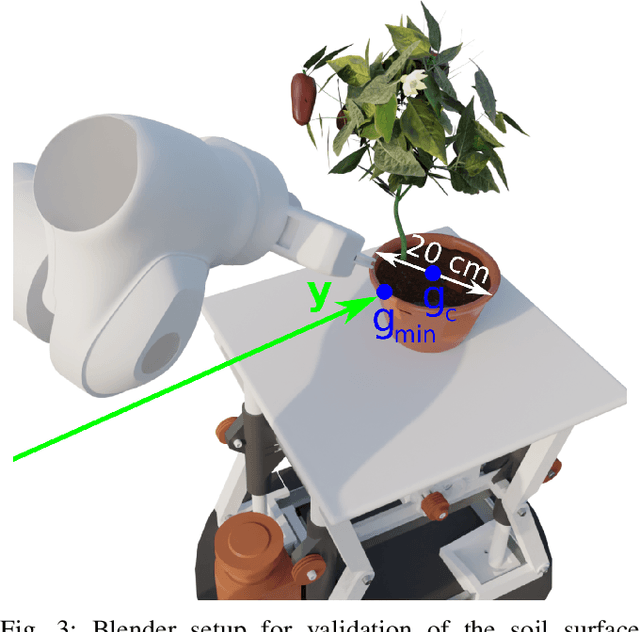

In this paper we propose a robotic system for Irrigation Water Management (IWM) in a structured robotic greenhouse environment. A commercially available robotic manipulator is equipped with an RGB-D camera and a soil moisture sensor. The two are used to automate the procedure known as "feel and appearance method", which is a way of monitoring soil moisture to determine when to irrigate and how much water to apply. We develop a compliant force control framework that enables the robot to insert the soil moisture sensor in the sensitive plant root zone of the soil, without harming the plant. RGB-D camera is used to roughly estimate the soil surface, in order to plan the soil sampling approach. Used together with the developed adaptive force control algorithm, the camera enables the robot to sample the soil without knowing the exact soil stiffness a priori. Finally, we postulate a deep learning based approach to utilize the camera to visually assess the soil health and moisture content.
Distributed Allocation and Scheduling of Tasks with Cross-Schedule Dependencies for Heterogeneous Multi-Robot Teams
Sep 07, 2021



To enable safe and efficient use of multi-robot systems in everyday life, a robust and fast method for coordinating their actions must be developed. In this paper, we present a distributed task allocation and scheduling algorithm for missions where the tasks of different robots are tightly coupled with temporal and precedence constraints. The approach is based on representing the problem as a variant of the vehicle routing problem, and the solution is found using a distributed metaheuristic algorithm based on evolutionary computation (CBM-pop). Such an approach allows a fast and near-optimal allocation and can therefore be used for online replanning in case of task changes. Simulation results show that the approach has better computational speed and scalability without loss of optimality compared to the state-of-the-art distributed methods. An application of the planning procedure to a practical use case of a greenhouse maintained by a multi-robot system is given.