 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparative Analysis of Programming by Demonstration Methods: Kinesthetic Teaching vs Human Demonstration
Mar 15, 2024Programming by demonstration (PbD) is a simple and efficient way to program robots without explicit robot programming. PbD enables unskilled operators to easily demonstrate and guide different robots to execute task. In this paper we present comparison of demonstration methods with comprehensive user study. Each participant had to demonstrate drawing simple pattern with human demonstration using virtual marker and kinesthetic teaching with robot manipulator. To evaluate differences between demonstration methods, we conducted user study with 24 participants which filled out NASA raw task load index (rTLX) and system usability scale (SUS). We also evaluated similarity of the executed trajectories to measure difference between demonstrated and ideal trajectory. We concluded study with finding that human demonstration using a virtual marker is on average 8 times faster, superior in terms of quality and imposes 2 times less overall workload than kinesthetic teaching.
Cooperative Aerial-Ground Multi-Robot System for Automated Construction Tasks
Apr 29, 2022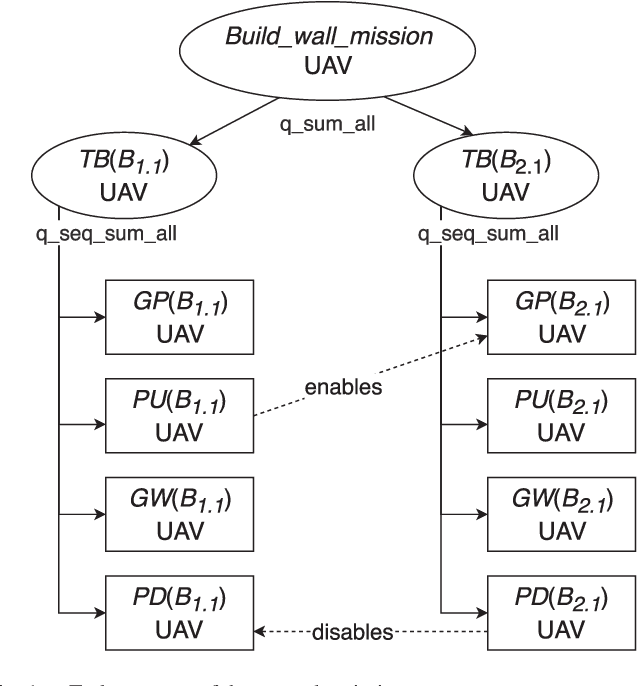
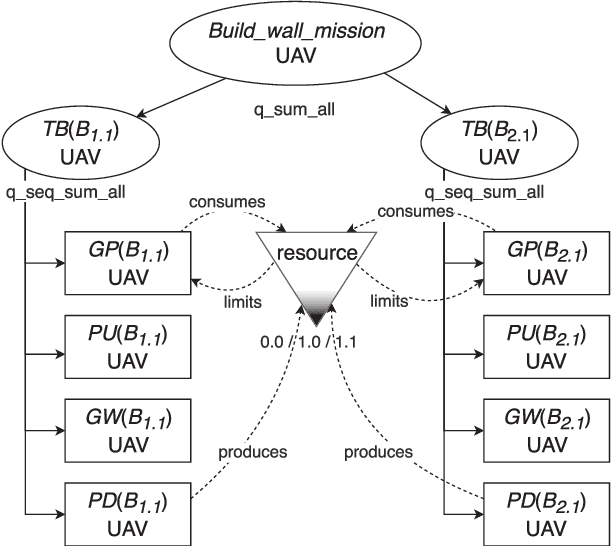
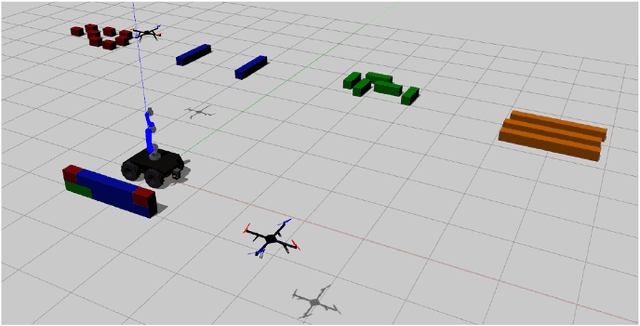
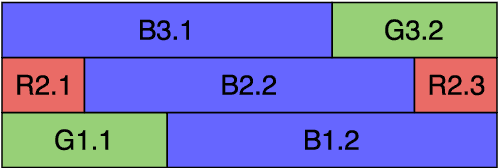
In this paper, we study a cooperative aerial-ground robotic team and its application to the task of automated construction. We propose a solution for planning and coordinating the mission of constructing a wall with a predefined structure for a heterogeneous system consisting of one mobile robot and up to three unmanned aerial vehicles. The wall consists of bricks of various weights and sizes, some of which need to be transported using multiple robots simultaneously. To that end, we use hierarchical task representation to specify interrelationships between mission subtasks and employ effective scheduling and coordination mechanism, inspired by Generalized Partial Global Planning. We evaluate the performance of the method under different optimization criteria and validate the solution in the realistic Gazebo simulation environment.
* Also included in conference proceedings of IEEE International Conference on Robotics and Automation (ICRA) 2020
Sim2Air - Synthetic aerial dataset for UAV monitoring
Oct 11, 2021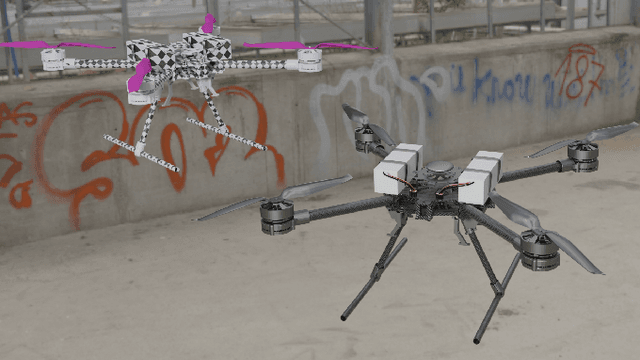
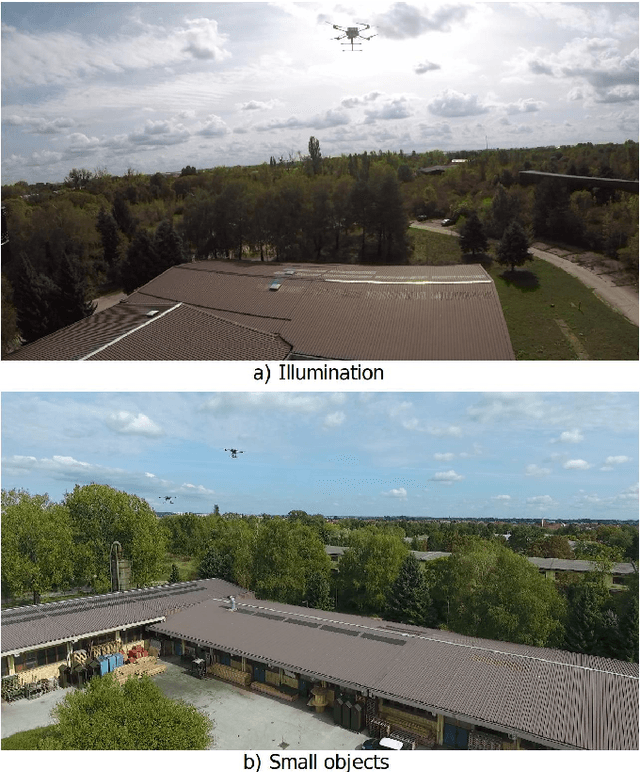
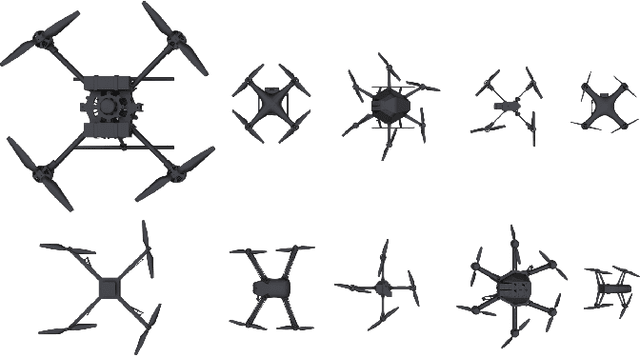

In this paper we propose a novel approach to generate a synthetic aerial dataset for application in UAV monitoring. We propose to accentuate shape-based object representation by applying texture randomization. A diverse dataset with photorealism in all parameters such as shape, pose, lighting, scale, viewpoint, etc. except for atypical textures is created in a 3D modelling software Blender. Our approach specifically targets two conditions in aerial images where texture of objects is difficult to detect, namely illumination changes and objects occupying only a small portion of the image. Experimental evaluation confirmed our approach by increasing the mAP value by 17 and 3.7 points on two test datasets of real images. In analysing domain similarity, we conclude that the more the generalisation capability is put to the test, the more obvious are the advantages of the shape-based representation.
Brain over Brawn -- Using a Stereo Camera to Detect, Track and Intercept a Faster UAV by Reconstructing Its Trajectory
Jul 02, 2021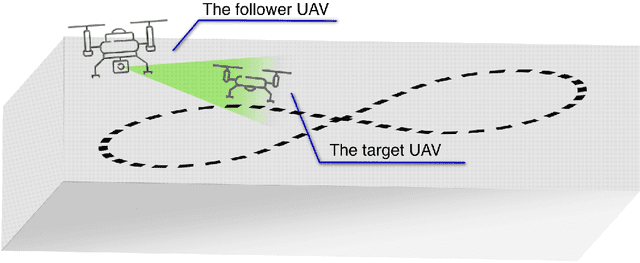
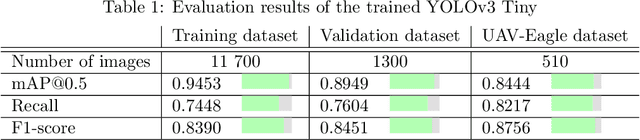
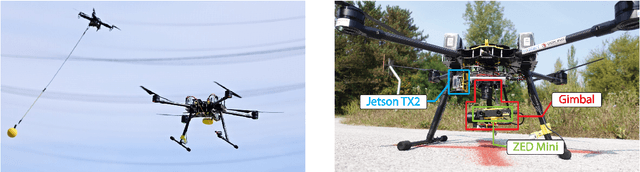
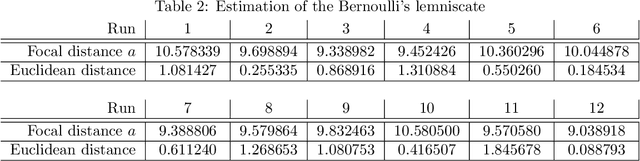
The work presented in this paper demonstrates our approach to intercepting a faster intruder UAV, inspired by the MBZIRC2020 Challenge 1. By leveraging the knowledge of the shape of the intruder's trajectory we are able to calculate the interception point. Target tracking is based on image processing by a YOLOv3 Tiny convolutional neural network, combined with depth calculation using a gimbal-mounted ZED Mini stereo camera. We use RGB and depth data from ZED Mini to extract the 3D position of the target, for which we devise a histogram-of-depth based processing to reduce noise. Obtained 3D measurements of target's position are used to calculate the position, the orientation and the size of a figure-eight shaped trajectory, which we approximate using lemniscate of Bernoulli. Once the approximation is deemed sufficiently precise, measured by Hausdorff distance between measurements and the approximation, an interception point is calculated to position the intercepting UAV right on the path of the target. The proposed method, which has been significantly improved based on the experience gathered during the MBZIRC competition, has been validated in simulation and through field experiments. The results confirmed that an efficient visual perception module which extracts information related to the motion of the target UAV as a basis for the interception, has been developed. The system is able to track and intercept the target which is 30% faster than the interceptor in majority of simulation experiments. Tests in the unstructured environment yielded 9 out of 12 successful results.
A Comprehensive LiDAR-based SLAM Comparison for Control of Unmanned Aerial Vehicles
Nov 04, 2020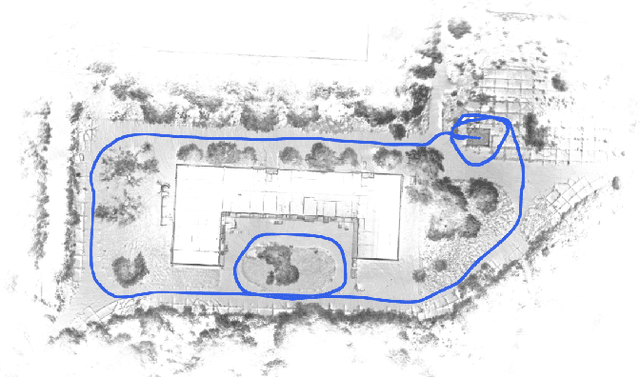

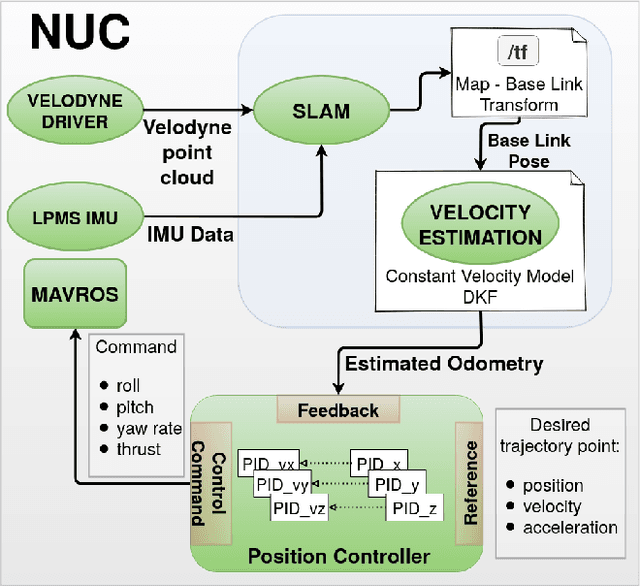
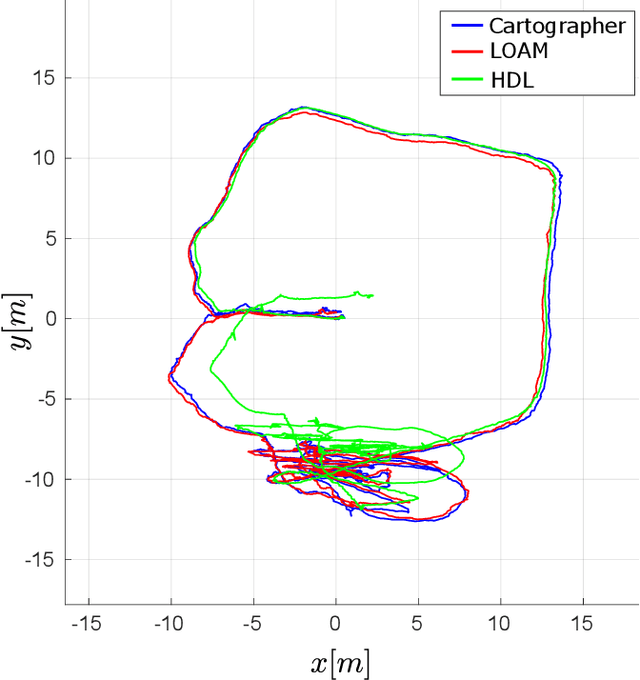
This paper investigates the use of LiDAR SLAM as a pose feedback for autonomous flight. Cartographer, LOAM and hdl graph SLAM are tested for this role. They are first compared offline on a series of datasets to see if they are capable of producing high-quality pose estimations in agile and long-range flight scenarios. The second stage of testing consists of integrating the SLAM algorithms into a cascade PID UAV control system and comparing the control system performance on step excitation signals and helical trajectories. The comparison is based on step response characteristics and several time integral performance criteria as well as the RMS error between planned and executed trajectory.
A Multi-Resolution Frontier-Based Planner for Autonomous 3D Exploration
Nov 04, 2020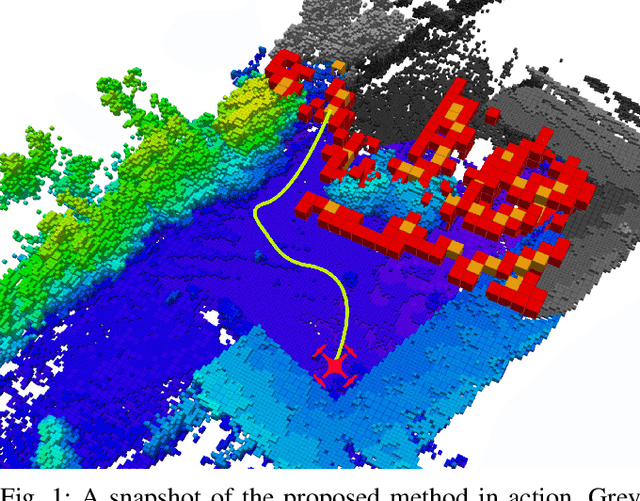
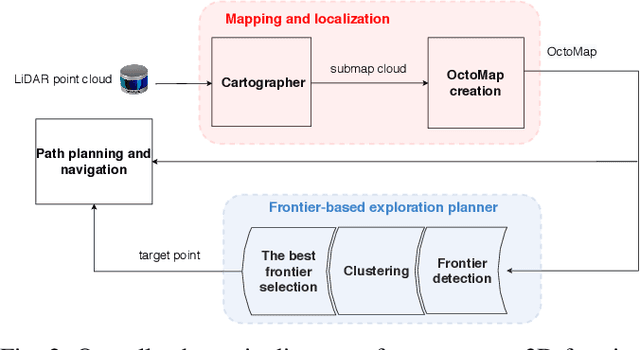
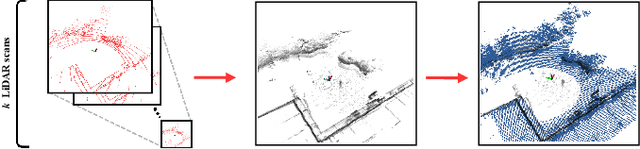
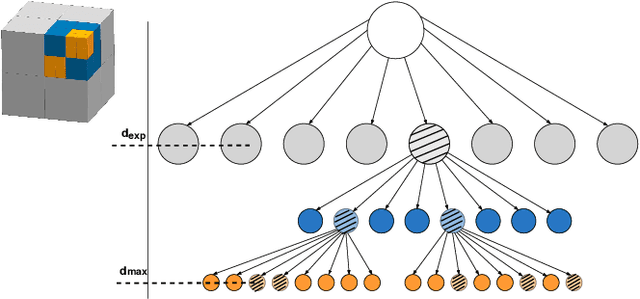
In this paper we propose a planner for 3D exploration that is suitable for applications using state-of-the-art 3D sensors such as lidars, which produce large point clouds with each scan. The planner is based on the detection of a frontier - a boundary between the explored and unknown part of the environment - and consists of the algorithm for detecting frontier points, followed by clustering of frontier points and selecting the best frontier point to be explored. Compared to existing frontier-based approaches, the planner is more scalable, i.e. it requires less time for the same data set size while ensuring similar exploration time. Performance is achieved by not relying on data obtained directly from the 3D sensor, but on data obtained by a mapping algorithm. In order to cluster the frontier points, we use the properties of the Octree environment representation, which allows easy analysis with different resolutions. The planner is tested in the simulation environment and in an outdoor test area with a UAV equipped with a lidar sensor. The results show the advantages of the approach.