 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based system for a real-time detection and following of UAV
Apr 29, 2022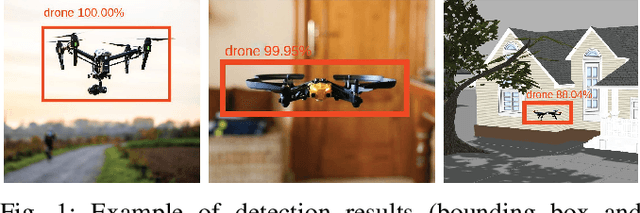
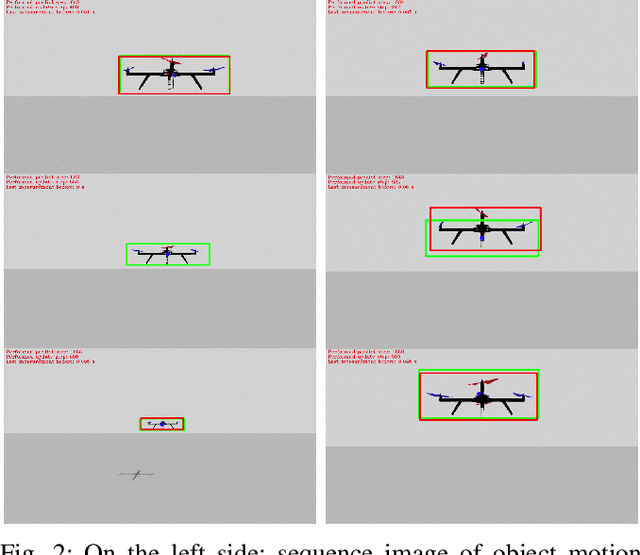
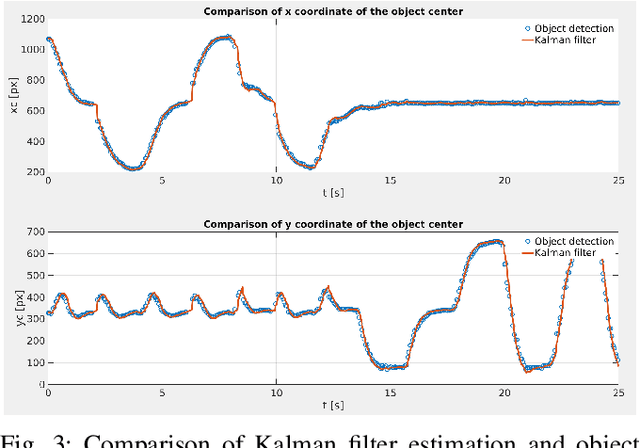
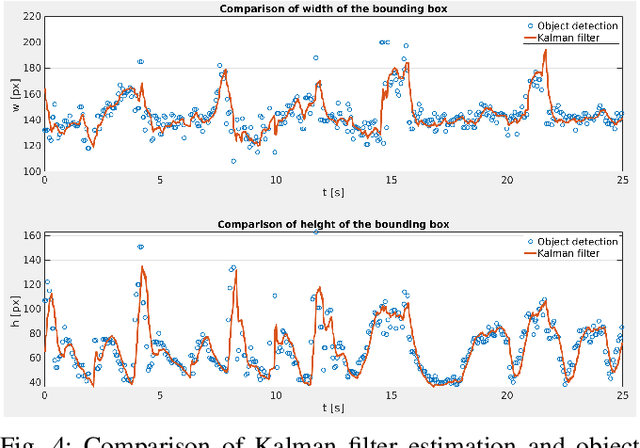
In this paper a vision-based system for detection, motion tracking and following of Unmanned Aerial Vehicle (UAV) with other UAV (follower) is presented. For detection of an airborne UAV we apply a convolutional neural network YOLO trained on a collected and processed dataset of 10,000 images. The trained network is capable of detecting various multirotor UAVs in indoor, outdoor and simulation environments. Furthermore, detection results are improved with Kalman filter which ensures steady and reliable information about position and velocity of a target UAV. Preserving the target UAV in the field of view (FOV) and at required distance is accomplished by a simple nonlinear controller based on visual servoing strategy. The proposed system achieves a real-time performance on Neural Compute Stick 2 with a speed of 20 frames per second (FPS) for the detection of an UAV. Justification and efficiency of the developed vision-based system are confirmed in Gazebo simulation experiment where the target UAV is executing a 3D trajectory in a shape of number eight.
Sim2Air - Synthetic aerial dataset for UAV monitoring
Oct 11, 2021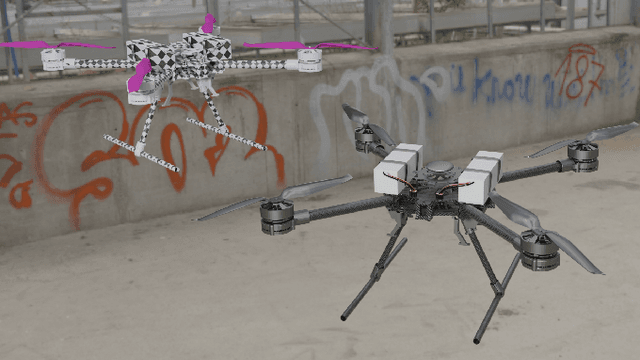
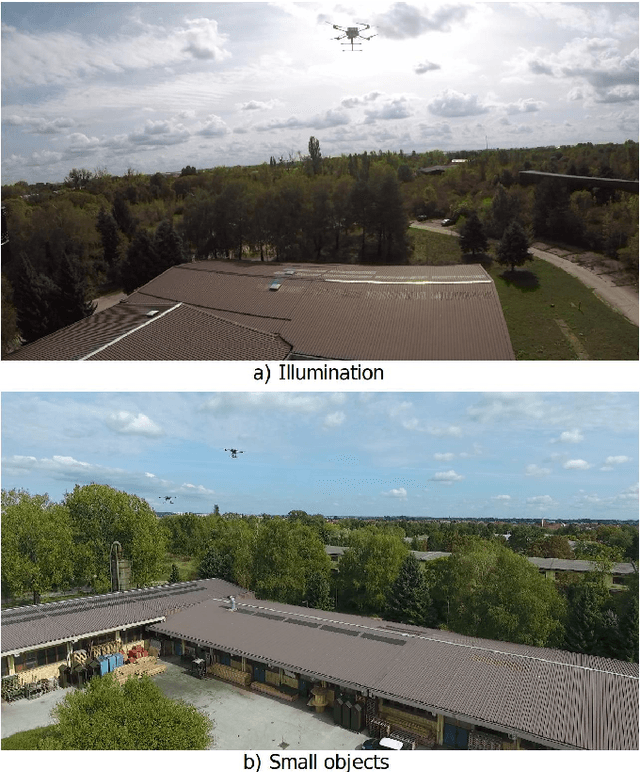
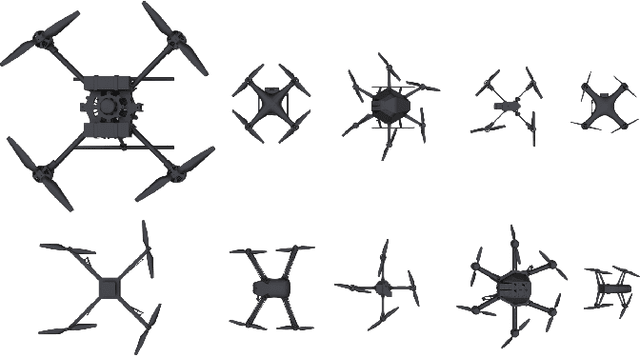

In this paper we propose a novel approach to generate a synthetic aerial dataset for application in UAV monitoring. We propose to accentuate shape-based object representation by applying texture randomization. A diverse dataset with photorealism in all parameters such as shape, pose, lighting, scale, viewpoint, etc. except for atypical textures is created in a 3D modelling software Blender. Our approach specifically targets two conditions in aerial images where texture of objects is difficult to detect, namely illumination changes and objects occupying only a small portion of the image. Experimental evaluation confirmed our approach by increasing the mAP value by 17 and 3.7 points on two test datasets of real images. In analysing domain similarity, we conclude that the more the generalisation capability is put to the test, the more obvious are the advantages of the shape-based representation.