 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBrain over Brawn -- Using a Stereo Camera to Detect, Track and Intercept a Faster UAV by Reconstructing Its Trajectory
Paper and Code
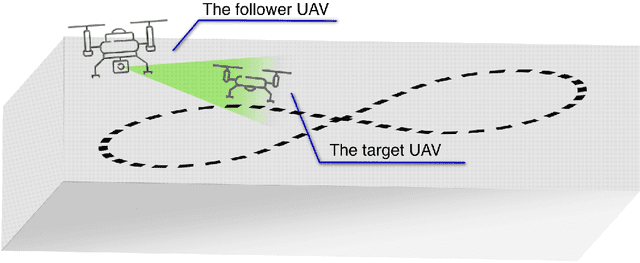
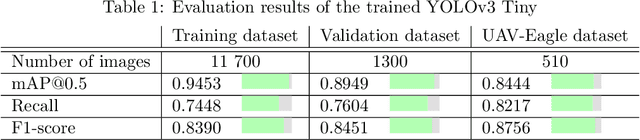
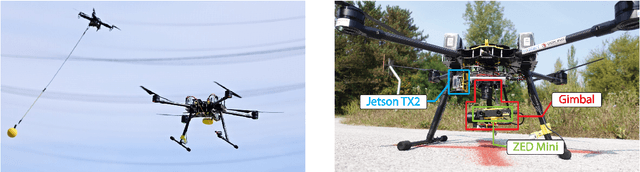
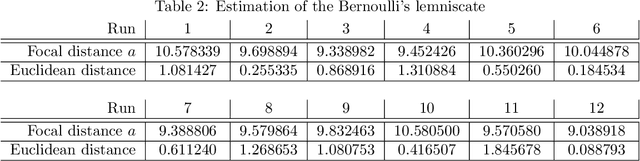
The work presented in this paper demonstrates our approach to intercepting a faster intruder UAV, inspired by the MBZIRC2020 Challenge 1. By leveraging the knowledge of the shape of the intruder's trajectory we are able to calculate the interception point. Target tracking is based on image processing by a YOLOv3 Tiny convolutional neural network, combined with depth calculation using a gimbal-mounted ZED Mini stereo camera. We use RGB and depth data from ZED Mini to extract the 3D position of the target, for which we devise a histogram-of-depth based processing to reduce noise. Obtained 3D measurements of target's position are used to calculate the position, the orientation and the size of a figure-eight shaped trajectory, which we approximate using lemniscate of Bernoulli. Once the approximation is deemed sufficiently precise, measured by Hausdorff distance between measurements and the approximation, an interception point is calculated to position the intercepting UAV right on the path of the target. The proposed method, which has been significantly improved based on the experience gathered during the MBZIRC competition, has been validated in simulation and through field experiments. The results confirmed that an efficient visual perception module which extracts information related to the motion of the target UAV as a basis for the interception, has been developed. The system is able to track and intercept the target which is 30% faster than the interceptor in majority of simulation experiments. Tests in the unstructured environment yielded 9 out of 12 successful results.