 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Exploration of Unknown 3D Environments Using a Frontier-Based Collector Strategy
Nov 21, 2023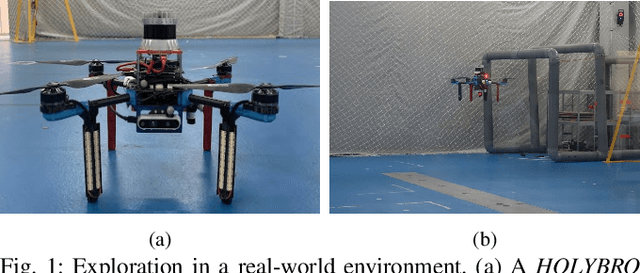
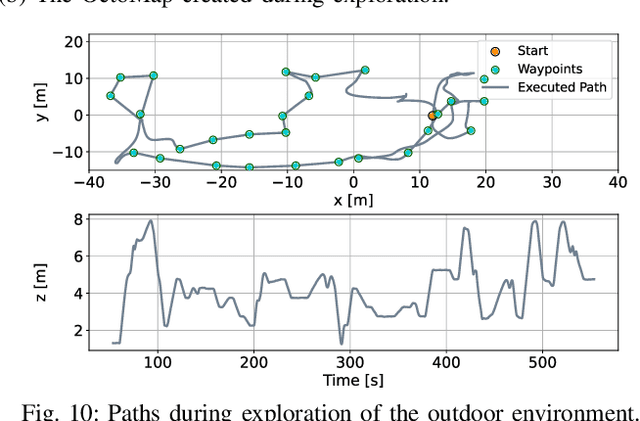
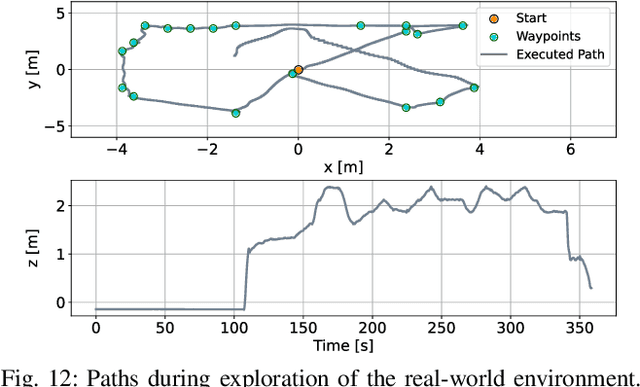
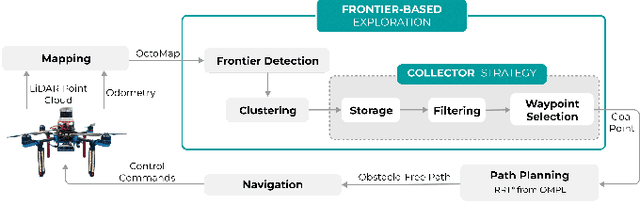
Autonomous exploration using unmanned aerial vehicles (UAVs) is essential for various tasks such as building inspections, rescue operations, deliveries, and warehousing. However, there are two main limitations to previous approaches: they may not be able to provide a complete map of the environment and assume that the map built during exploration is accurate enough for safe navigation, which is usually not the case. To address these limitations, a novel exploration method is proposed that combines frontier-based exploration with a collector strategy that achieves global exploration and complete map creation. In each iteration, the collector strategy stores and validates frontiers detected during exploration and selects the next best frontier to navigate to. The collector strategy ensures global exploration by balancing the exploitation of a known map with the exploration of unknown areas. In addition, the online path replanning ensures safe navigation through the map created during motion. The performance of the proposed method is verified by exploring 3D simulation environments in comparison with the state-of-the-art methods. Finally, the proposed approach is validated in a real-world experiment.
Dynamic Median Consensus for Marine Multi-Robot Systems Using Acoustic Communication
May 04, 2022
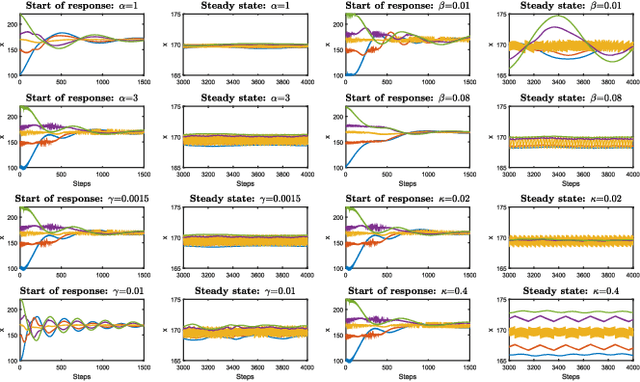
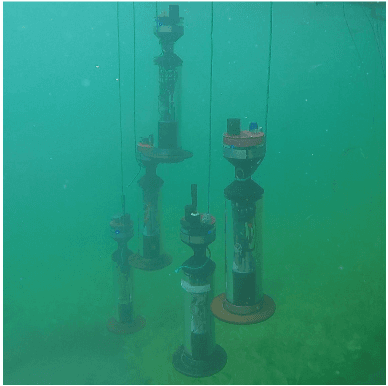
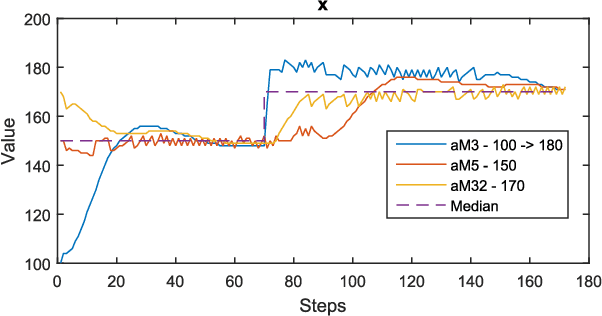
In this paper, we present a dynamic median consensus protocol for multi-agent systems using acoustic communication. The motivating target scenario is a multi-agent system consisting of underwater robots acting as intelligent sensors, applied to continuous monitoring of the state of a marine environment. The proposed protocol allows each agent to track the median value of individual measurements of all agents through local communication with neighbouring agents. Median is chosen as a measure robust to outliers, as opposed to average value, which is usually used. In contrast to the existing consensus protocols, the proposed protocol is dynamic, uses a switching communication topology and converges to median of measured signals. Stability and correctness of the protocol are theoretically proven. The protocol is tested in simulation, and accuracy and influence of protocol parameters on the system output are analyzed. The protocol is implemented and validated by a set of experiments on an underwater group of robots comprising of aMussel units. This experimental setup is one of the first deployments of any type of consensus protocol for an underwater setting. Both simulation and experimental results confirm the correctness of the presented approach.
Cooperative Aerial-Ground Multi-Robot System for Automated Construction Tasks
Apr 29, 2022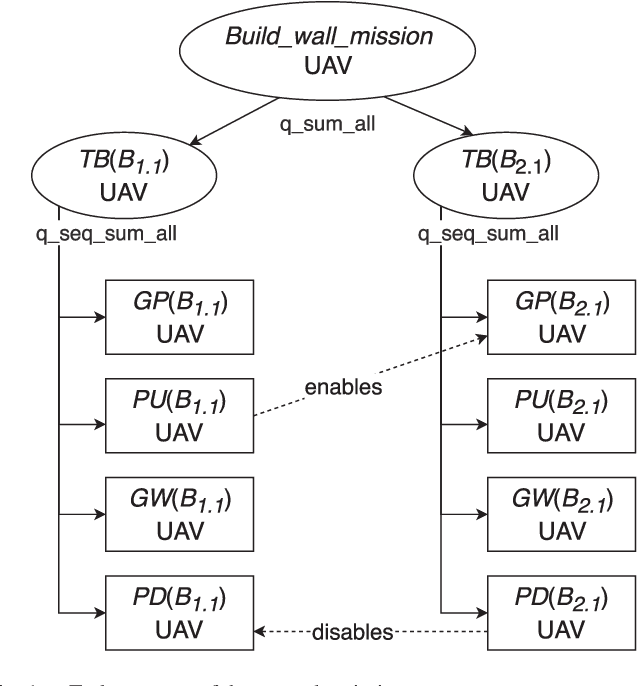
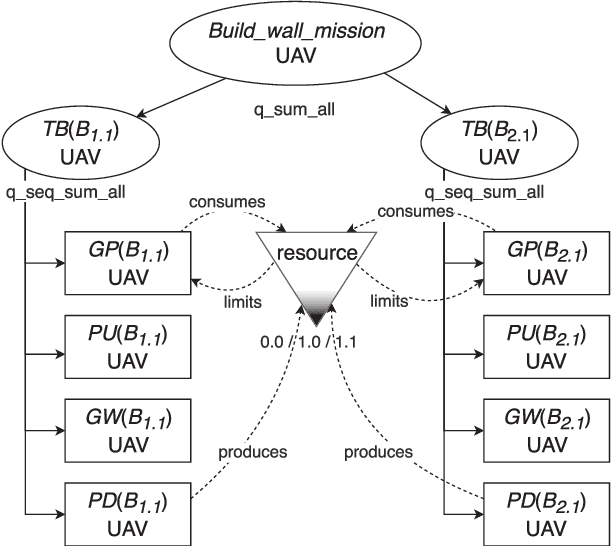
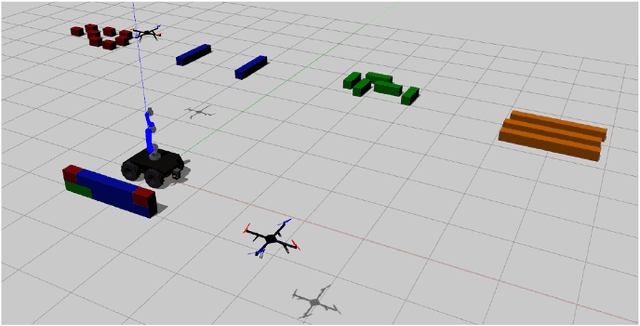
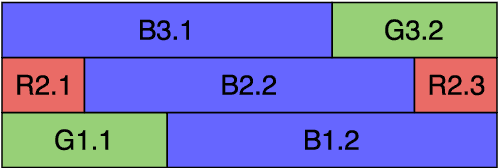
In this paper, we study a cooperative aerial-ground robotic team and its application to the task of automated construction. We propose a solution for planning and coordinating the mission of constructing a wall with a predefined structure for a heterogeneous system consisting of one mobile robot and up to three unmanned aerial vehicles. The wall consists of bricks of various weights and sizes, some of which need to be transported using multiple robots simultaneously. To that end, we use hierarchical task representation to specify interrelationships between mission subtasks and employ effective scheduling and coordination mechanism, inspired by Generalized Partial Global Planning. We evaluate the performance of the method under different optimization criteria and validate the solution in the realistic Gazebo simulation environment.
* Also included in conference proceedings of IEEE International Conference on Robotics and Automation (ICRA) 2020
A Shadowcasting-Based Next-Best-View Planner for Autonomous 3D Exploration
Sep 20, 2021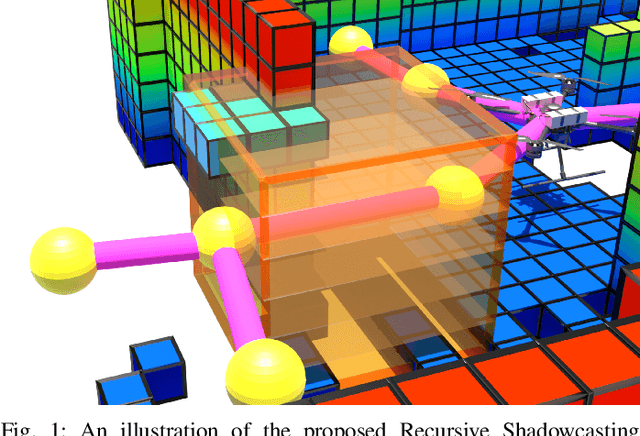
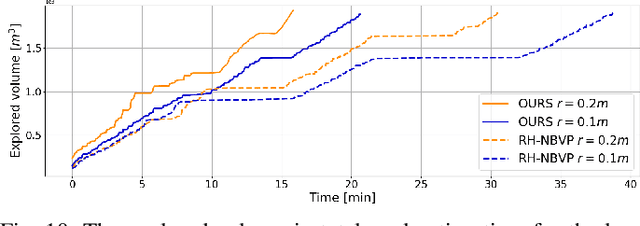
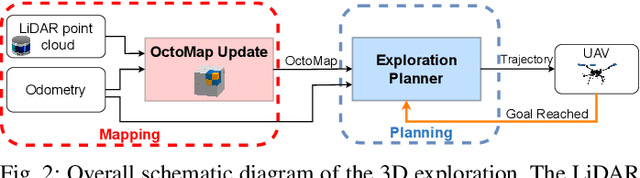
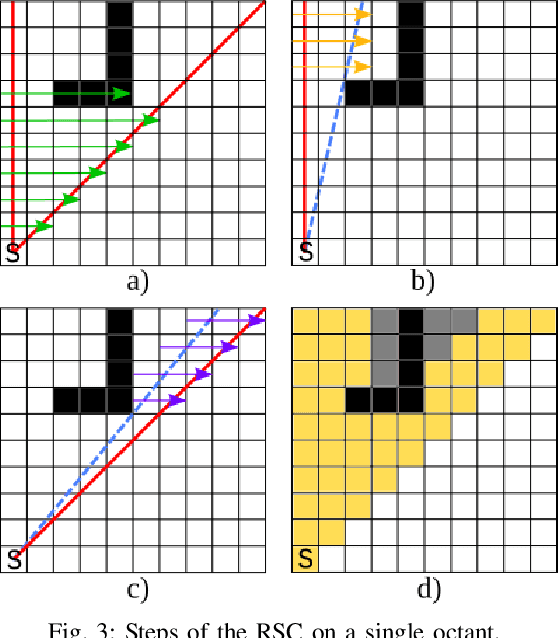
In this paper, we address the problem of autonomous exploration of unknown environments with an aerial robot equipped with a sensory set that produces large point clouds, such as LiDARs. The main goal is to gradually explore an area while planning paths and calculating information gain in short computation time, suitable for implementation on an on-board computer. To this end, we present a planner that randomly samples viewpoints in the environment map. It relies on a novel and efficient gain calculation based on the Recursive Shadowcasting algorithm. To determine the Next-Best-View (NBV), our planner uses a cuboid-based evaluation method that results in an enviably short computation time. To reduce the overall exploration time, we also use a dead end resolving strategy that allows us to quickly recover from dead ends in a challenging environment. Comparative experiments in simulation have shown that our approach outperforms the current state-of-the-art in terms of computational efficiency and total exploration time. The video of our approach can be found at https://www.youtube.com/playlist?list=PLC0C6uwoEQ8ZDhny1VdmFXLeTQOSBibQl.