 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAERIAL-CORE: AI-Powered Aerial Robots for Inspection and Maintenance of Electrical Power Infrastructures
Jan 04, 2024Large-scale infrastructures are prone to deterioration due to age, environmental influences, and heavy usage. Ensuring their safety through regular inspections and maintenance is crucial to prevent incidents that can significantly affect public safety and the environment. This is especially pertinent in the context of electrical power networks, which, while essential for energy provision, can also be sources of forest fires. Intelligent drones have the potential to revolutionize inspection and maintenance, eliminating the risks for human operators, increasing productivity, reducing inspection time, and improving data collection quality. However, most of the current methods and technologies in aerial robotics have been trialed primarily in indoor testbeds or outdoor settings under strictly controlled conditions, always within the line of sight of human operators. Additionally, these methods and technologies have typically been evaluated in isolation, lacking comprehensive integration. This paper introduces the first autonomous system that combines various innovative aerial robots. This system is designed for extended-range inspections beyond the visual line of sight, features aerial manipulators for maintenance tasks, and includes support mechanisms for human operators working at elevated heights. The paper further discusses the successful validation of this system on numerous electrical power lines, with aerial robots executing flights over 10 kilometers away from their ground control stations.
Towards Intuitive HMI for UAV Control
Sep 11, 2023



In the last decade, UAVs have become a widely used technology. As they are used by both professionals and amateurs, there is a need to explore different control modalities to make control intuitive and easier, especially for new users. In this work, we compared the most widely used joystick control with a custom human pose control. We used human pose estimation and arm movements to send UAV commands in the same way that operators use their fingers to send joystick commands. Experiments were conducted in a simulation environment with first-person visual feedback. Participants had to traverse the same maze with joystick and human pose control. Participants' subjective experience was assessed using the raw NASA Task Load Index.
Design and Validation of a Wireless Drone Docking Station
Sep 11, 2023Drones are increasingly operating autonomously, and the need for extending drone power autonomy is rapidly increasing. One of the most promising solutions to extend drone power autonomy is the use of docking stations to support both landing and recharging of the drone. To this end, we introduce a novel wireless drone docking station with three commercial wireless charging modules. We have developed two independent units, both in mechanical and electrical aspects: the energy transmitting unit and the energy receiving unit. We have also studied the efficiency of wireless power transfer and demonstrated the advantages of connecting three receiver modules connected in series and parallel. We have achieved maximum output power of 96.5 W with a power transfer efficiency of 56.6% for the series connection of coils. Finally, we implemented the system in practice on a drone and tested both energy transfer and landing.
Grabbing power line conductors based on the measurements of the magnetic field strength
Sep 11, 2023



This paper presents the method for the localization and grabbing of the long straight conductor based only on the magnetic field generated by the alternating current flowing through the conductor. The method uses two magnetometers mounted on the robot arm end-effector for localization. This location is then used to determine needed robot movement in order to grab the conductor. The method was tested in the laboratory conditions using the Schunk LWA 4P 6-axis robot arm.
Validation of two-wire power line UAV localization based on the magnetic field strength
Jun 18, 2022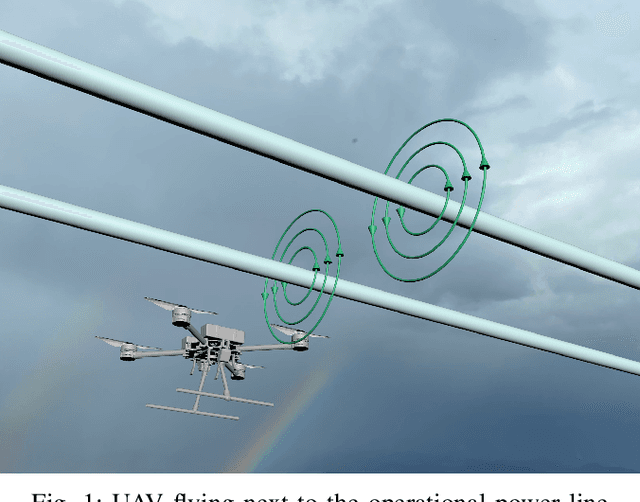
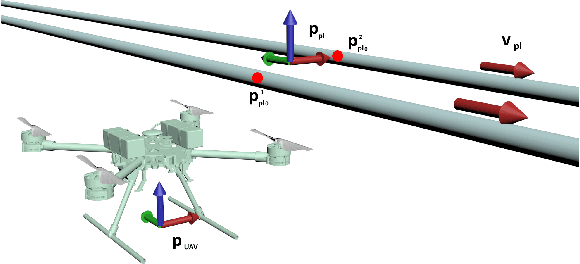
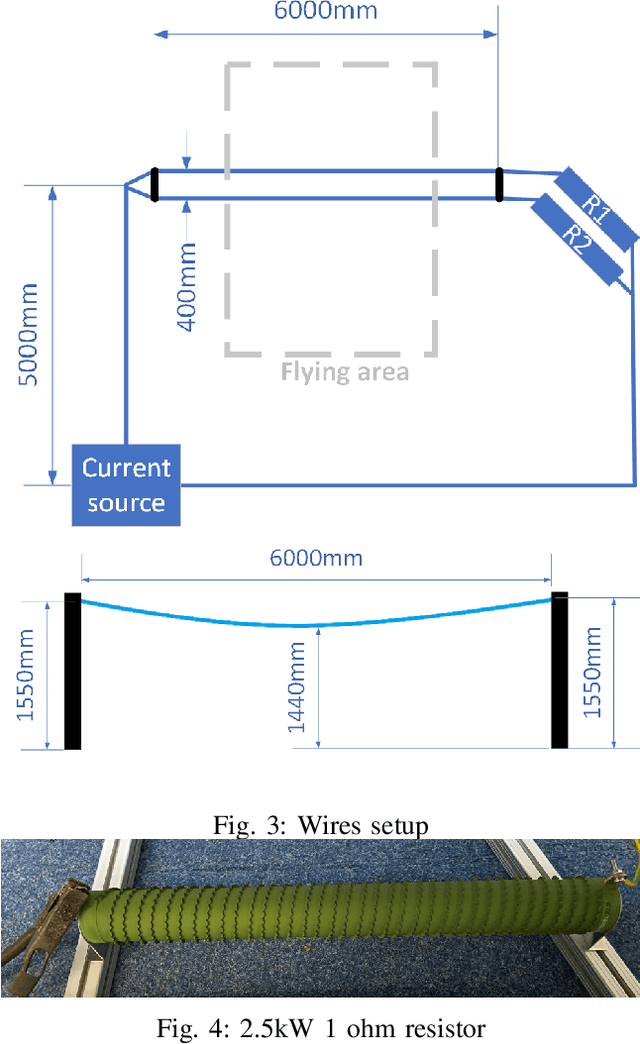
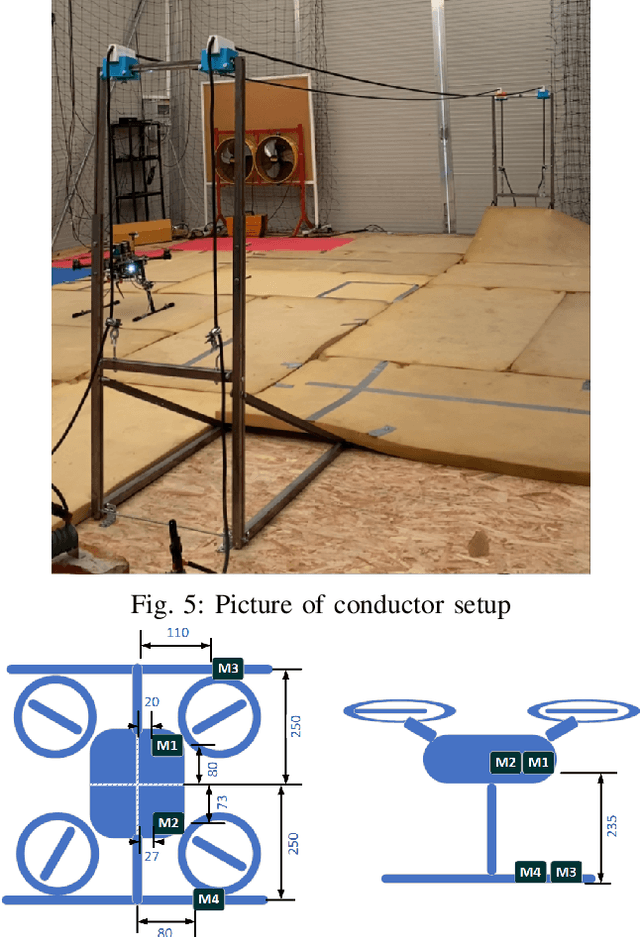
In this paper we extend our previous work on UAV localization based on the magnetic field strength. The method is based on a magnetic flux density distribution in vicinity of two very long, thin and parallel transmission lines. An UAV is equipped with 4 magnetometers, positioned so that obtained measurements give unique solution to an optimization problem used to find relative position and orientation of the UAV with respect to conductors. Several sets of experiments, undertaken on a laboratory setup, confirmed validity of the method for both solutions - analytical and numerical optimization. Obtained results, compared with high precision motion capture system, are within range of standard RTK positioning.
Dynamic Median Consensus for Marine Multi-Robot Systems Using Acoustic Communication
May 04, 2022
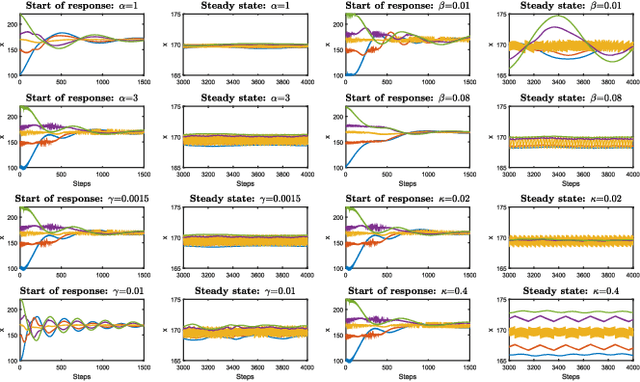
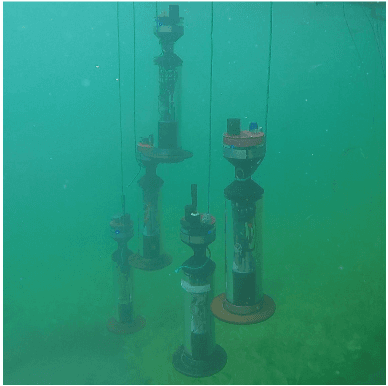
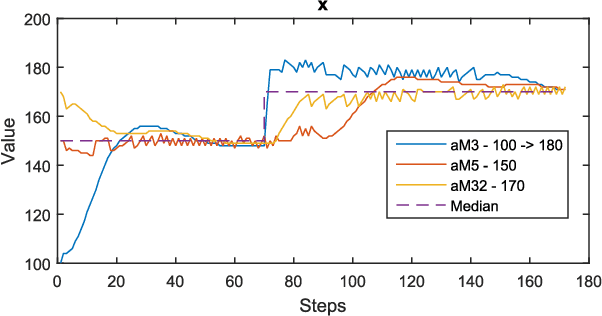
In this paper, we present a dynamic median consensus protocol for multi-agent systems using acoustic communication. The motivating target scenario is a multi-agent system consisting of underwater robots acting as intelligent sensors, applied to continuous monitoring of the state of a marine environment. The proposed protocol allows each agent to track the median value of individual measurements of all agents through local communication with neighbouring agents. Median is chosen as a measure robust to outliers, as opposed to average value, which is usually used. In contrast to the existing consensus protocols, the proposed protocol is dynamic, uses a switching communication topology and converges to median of measured signals. Stability and correctness of the protocol are theoretically proven. The protocol is tested in simulation, and accuracy and influence of protocol parameters on the system output are analyzed. The protocol is implemented and validated by a set of experiments on an underwater group of robots comprising of aMussel units. This experimental setup is one of the first deployments of any type of consensus protocol for an underwater setting. Both simulation and experimental results confirm the correctness of the presented approach.