Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValidation of two-wire power line UAV localization based on the magnetic field strength
Jun 18, 2022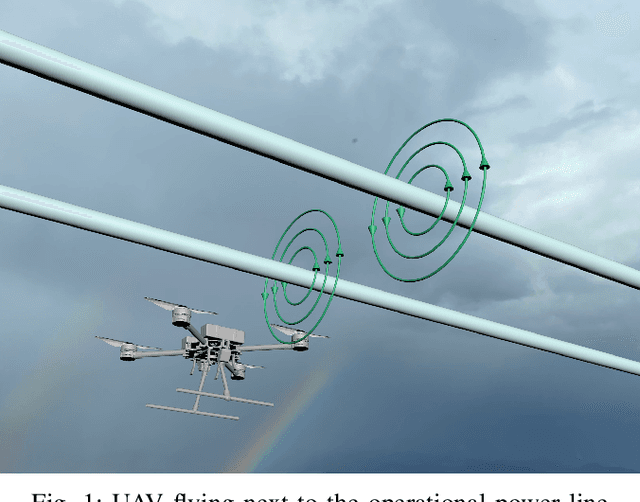
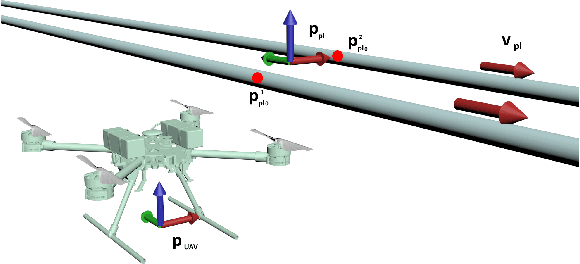
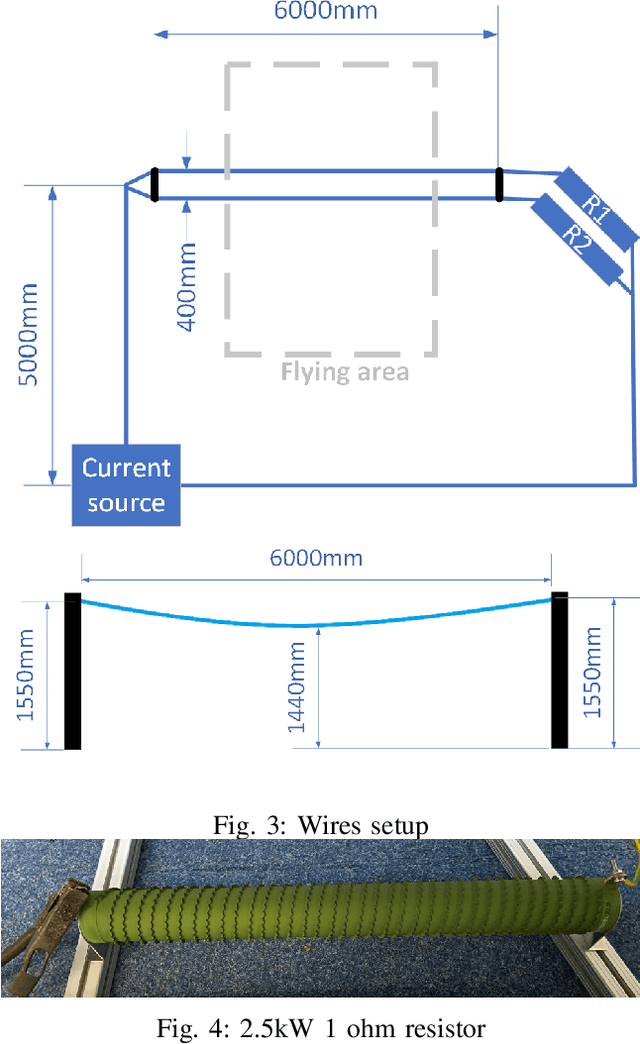
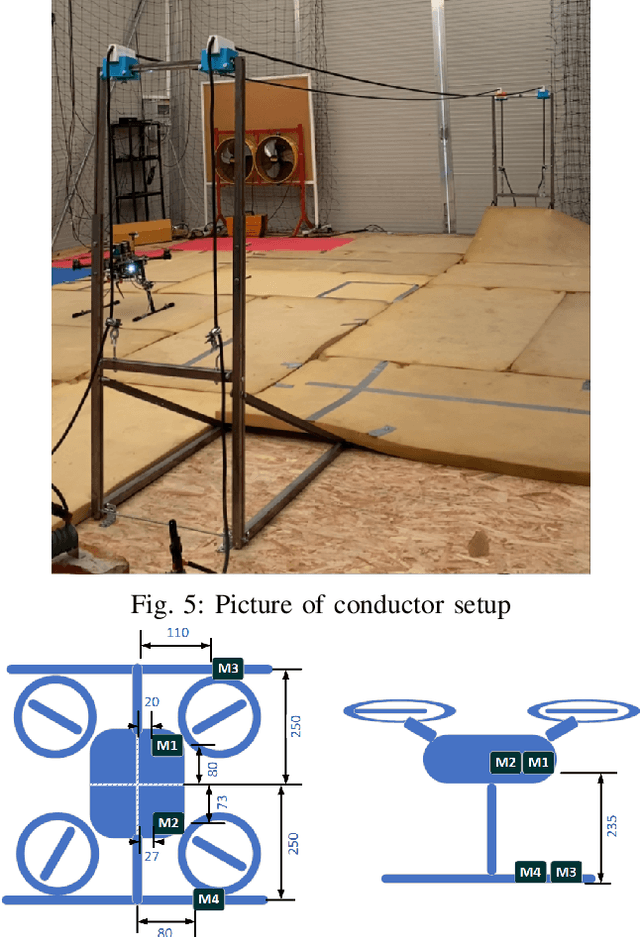
In this paper we extend our previous work on UAV localization based on the magnetic field strength. The method is based on a magnetic flux density distribution in vicinity of two very long, thin and parallel transmission lines. An UAV is equipped with 4 magnetometers, positioned so that obtained measurements give unique solution to an optimization problem used to find relative position and orientation of the UAV with respect to conductors. Several sets of experiments, undertaken on a laboratory setup, confirmed validity of the method for both solutions - analytical and numerical optimization. Obtained results, compared with high precision motion capture system, are within range of standard RTK positioning.
* ICUAS 2022, The 2022 International Conference on Unmanned Aircraft
Systems
Via