 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrabbing power line conductors based on the measurements of the magnetic field strength
Sep 11, 2023This paper presents the method for the localization and grabbing of the long straight conductor based only on the magnetic field generated by the alternating current flowing through the conductor. The method uses two magnetometers mounted on the robot arm end-effector for localization. This location is then used to determine needed robot movement in order to grab the conductor. The method was tested in the laboratory conditions using the Schunk LWA 4P 6-axis robot arm.
Validation of two-wire power line UAV localization based on the magnetic field strength
Jun 18, 2022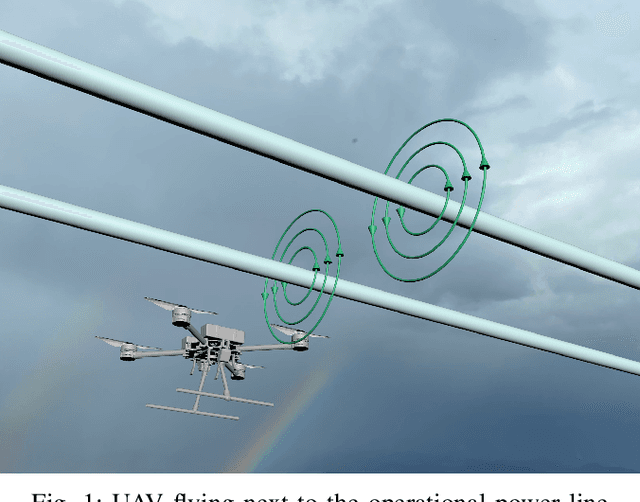
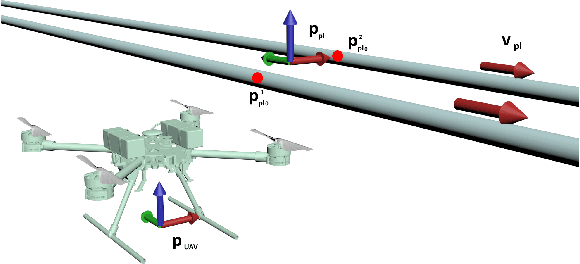
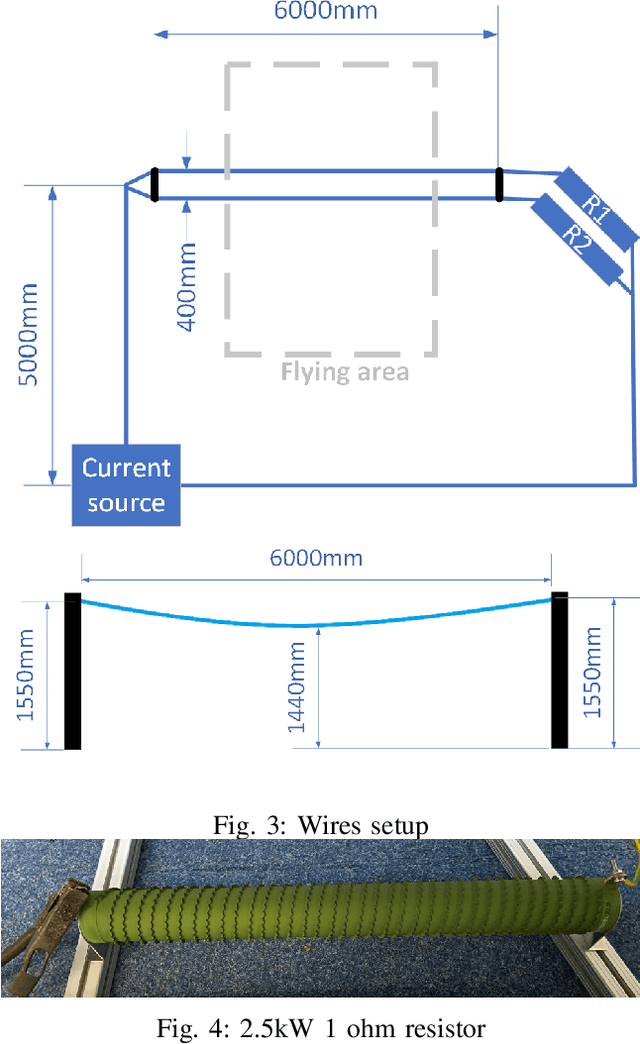
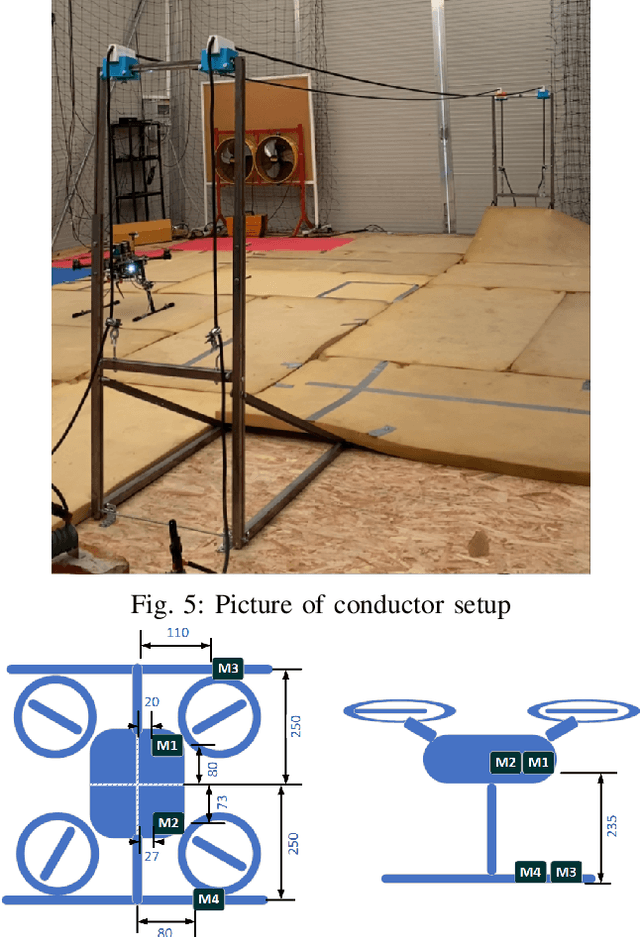
In this paper we extend our previous work on UAV localization based on the magnetic field strength. The method is based on a magnetic flux density distribution in vicinity of two very long, thin and parallel transmission lines. An UAV is equipped with 4 magnetometers, positioned so that obtained measurements give unique solution to an optimization problem used to find relative position and orientation of the UAV with respect to conductors. Several sets of experiments, undertaken on a laboratory setup, confirmed validity of the method for both solutions - analytical and numerical optimization. Obtained results, compared with high precision motion capture system, are within range of standard RTK positioning.