 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Median Consensus for Marine Multi-Robot Systems Using Acoustic Communication
May 04, 2022
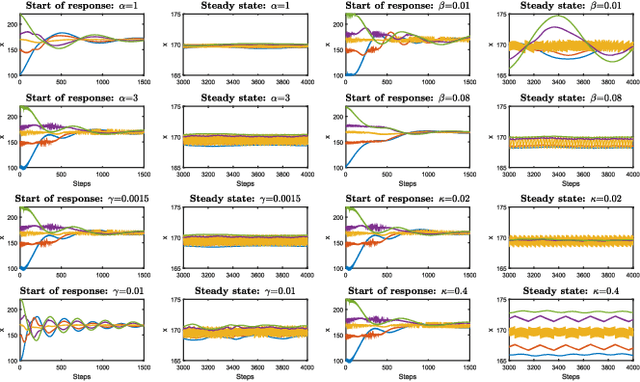
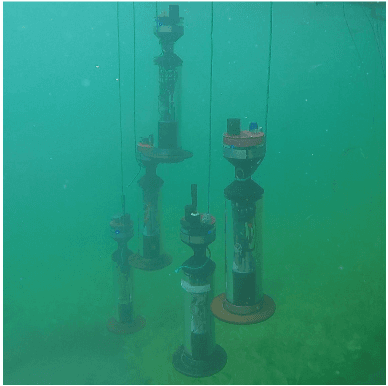
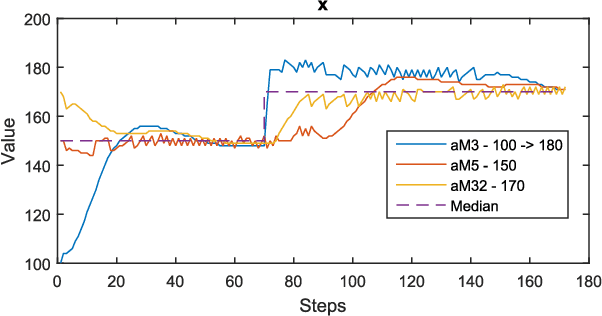
In this paper, we present a dynamic median consensus protocol for multi-agent systems using acoustic communication. The motivating target scenario is a multi-agent system consisting of underwater robots acting as intelligent sensors, applied to continuous monitoring of the state of a marine environment. The proposed protocol allows each agent to track the median value of individual measurements of all agents through local communication with neighbouring agents. Median is chosen as a measure robust to outliers, as opposed to average value, which is usually used. In contrast to the existing consensus protocols, the proposed protocol is dynamic, uses a switching communication topology and converges to median of measured signals. Stability and correctness of the protocol are theoretically proven. The protocol is tested in simulation, and accuracy and influence of protocol parameters on the system output are analyzed. The protocol is implemented and validated by a set of experiments on an underwater group of robots comprising of aMussel units. This experimental setup is one of the first deployments of any type of consensus protocol for an underwater setting. Both simulation and experimental results confirm the correctness of the presented approach.
Cooperative Aerial-Ground Multi-Robot System for Automated Construction Tasks
Apr 29, 2022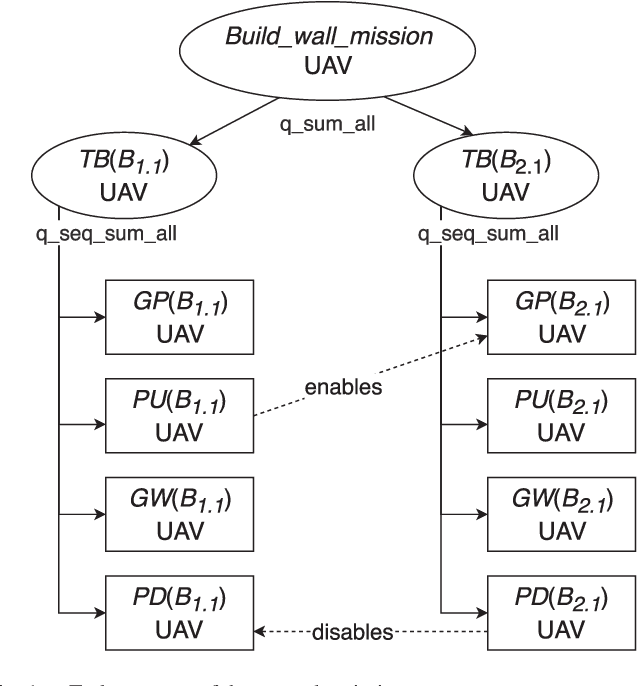
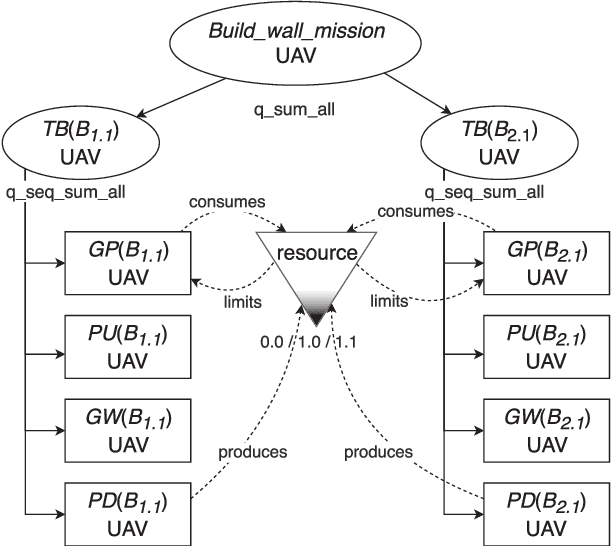
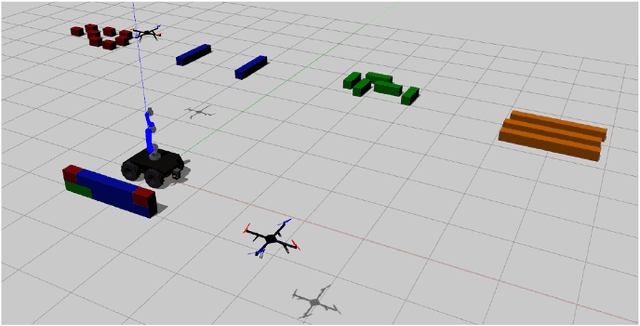
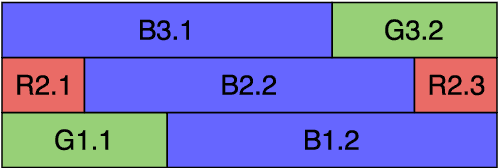
In this paper, we study a cooperative aerial-ground robotic team and its application to the task of automated construction. We propose a solution for planning and coordinating the mission of constructing a wall with a predefined structure for a heterogeneous system consisting of one mobile robot and up to three unmanned aerial vehicles. The wall consists of bricks of various weights and sizes, some of which need to be transported using multiple robots simultaneously. To that end, we use hierarchical task representation to specify interrelationships between mission subtasks and employ effective scheduling and coordination mechanism, inspired by Generalized Partial Global Planning. We evaluate the performance of the method under different optimization criteria and validate the solution in the realistic Gazebo simulation environment.
* Also included in conference proceedings of IEEE International Conference on Robotics and Automation (ICRA) 2020