 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparative Analysis of Programming by Demonstration Methods: Kinesthetic Teaching vs Human Demonstration
Mar 15, 2024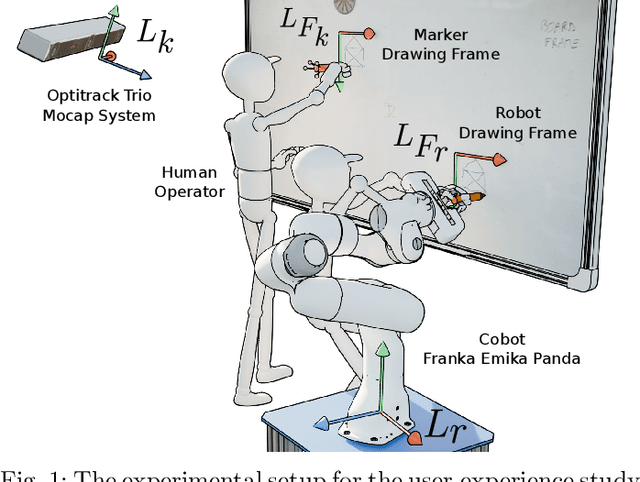



Programming by demonstration (PbD) is a simple and efficient way to program robots without explicit robot programming. PbD enables unskilled operators to easily demonstrate and guide different robots to execute task. In this paper we present comparison of demonstration methods with comprehensive user study. Each participant had to demonstrate drawing simple pattern with human demonstration using virtual marker and kinesthetic teaching with robot manipulator. To evaluate differences between demonstration methods, we conducted user study with 24 participants which filled out NASA raw task load index (rTLX) and system usability scale (SUS). We also evaluated similarity of the executed trajectories to measure difference between demonstrated and ideal trajectory. We concluded study with finding that human demonstration using a virtual marker is on average 8 times faster, superior in terms of quality and imposes 2 times less overall workload than kinesthetic teaching.
Towards Intuitive HMI for UAV Control
Sep 11, 2023



In the last decade, UAVs have become a widely used technology. As they are used by both professionals and amateurs, there is a need to explore different control modalities to make control intuitive and easier, especially for new users. In this work, we compared the most widely used joystick control with a custom human pose control. We used human pose estimation and arm movements to send UAV commands in the same way that operators use their fingers to send joystick commands. Experiments were conducted in a simulation environment with first-person visual feedback. Participants had to traverse the same maze with joystick and human pose control. Participants' subjective experience was assessed using the raw NASA Task Load Index.