 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Shadowcasting-Based Next-Best-View Planner for Autonomous 3D Exploration
Paper and Code
Sep 20, 2021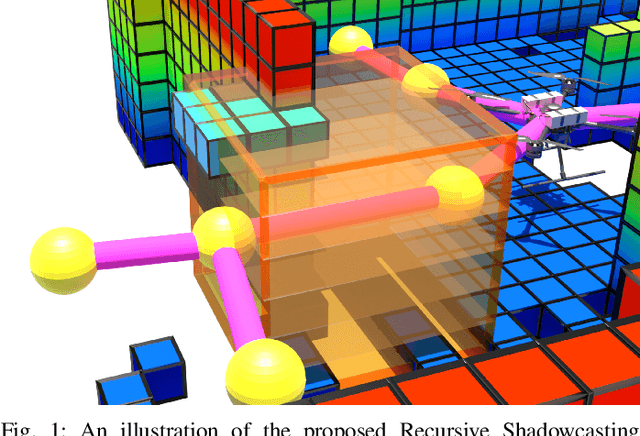
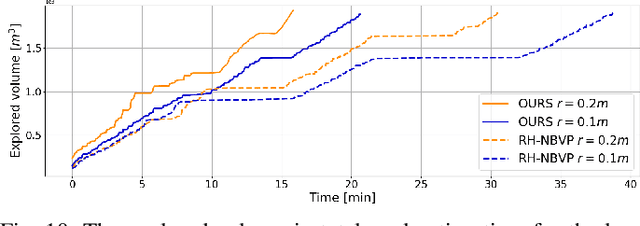
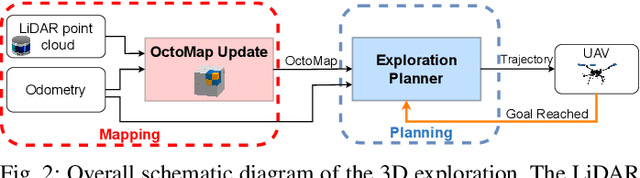
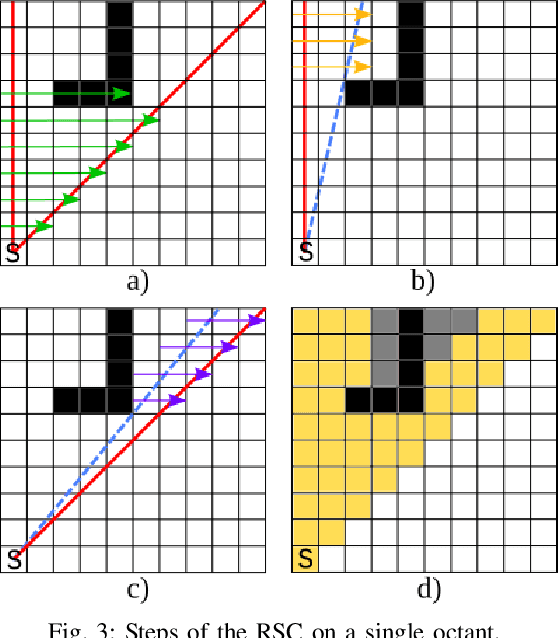
In this paper, we address the problem of autonomous exploration of unknown environments with an aerial robot equipped with a sensory set that produces large point clouds, such as LiDARs. The main goal is to gradually explore an area while planning paths and calculating information gain in short computation time, suitable for implementation on an on-board computer. To this end, we present a planner that randomly samples viewpoints in the environment map. It relies on a novel and efficient gain calculation based on the Recursive Shadowcasting algorithm. To determine the Next-Best-View (NBV), our planner uses a cuboid-based evaluation method that results in an enviably short computation time. To reduce the overall exploration time, we also use a dead end resolving strategy that allows us to quickly recover from dead ends in a challenging environment. Comparative experiments in simulation have shown that our approach outperforms the current state-of-the-art in terms of computational efficiency and total exploration time. The video of our approach can be found at https://www.youtube.com/playlist?list=PLC0C6uwoEQ8ZDhny1VdmFXLeTQOSBibQl.