 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeError State Extended Kalman Filter Multi-Sensor Fusion for Unmanned Aerial Vehicle Localization in GPS and Magnetometer Denied Indoor Environments
Sep 10, 2021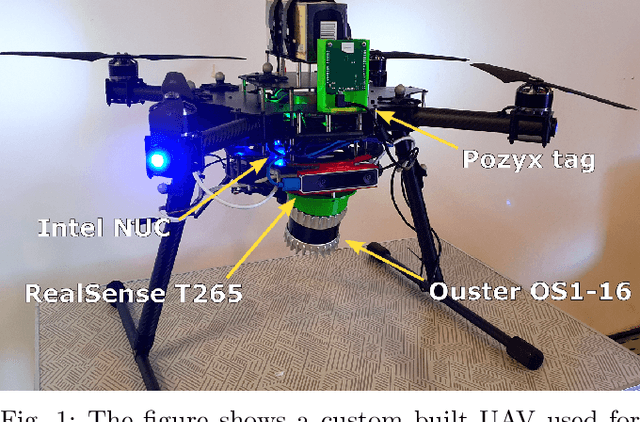
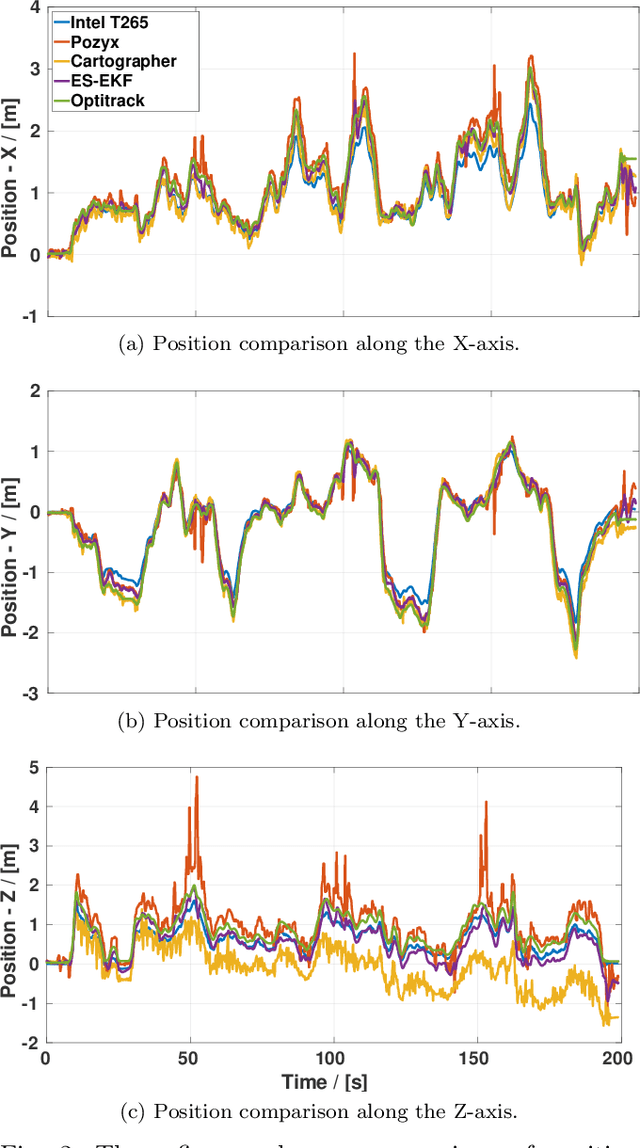
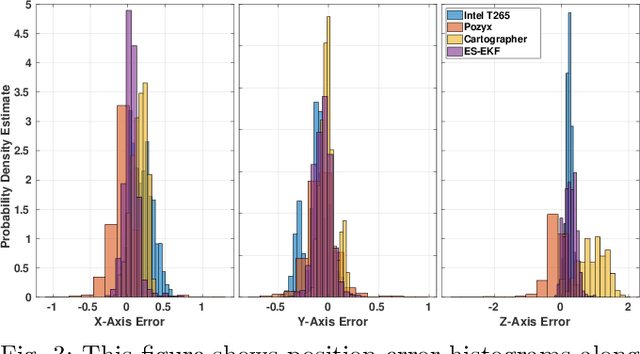
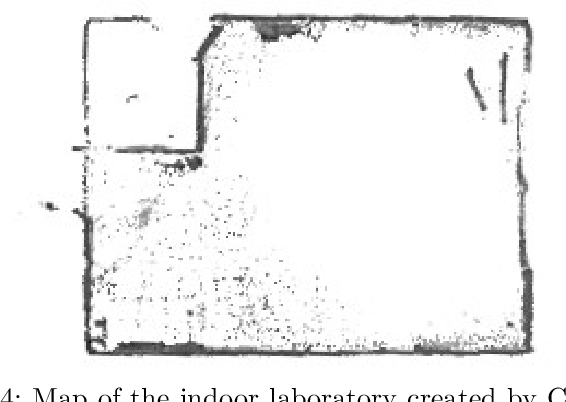
This paper addresses the issues of unmanned aerial vehicle (UAV) indoor navigation, specifically in areas where GPS and magnetometer sensor measurements are unavailable or unreliable. The proposed solution is to use an error state extended Kalman filter (ES -EKF) in the context of multi-sensor fusion. Its implementation is adapted to fuse measurements from multiple sensor sources and the state model is extended to account for sensor drift and possible calibration inaccuracies. Experimental validation is performed by fusing IMU data obtained from the PixHawk 2.1 flight controller with pose measurements from LiDAR Cartographer SLAM, visual odometry provided by the Intel T265 camera and position measurements from the Pozyx UWB indoor positioning system. The estimated odometry from ES-EKF is validated against ground truth data from the Optitrack motion capture system and its use in a position control loop to stabilize the UAV is demonstrated.
Flying with Cartographer: Adapting the Cartographer 3D Graph SLAM Stack for UAV Navigation
Jun 04, 2021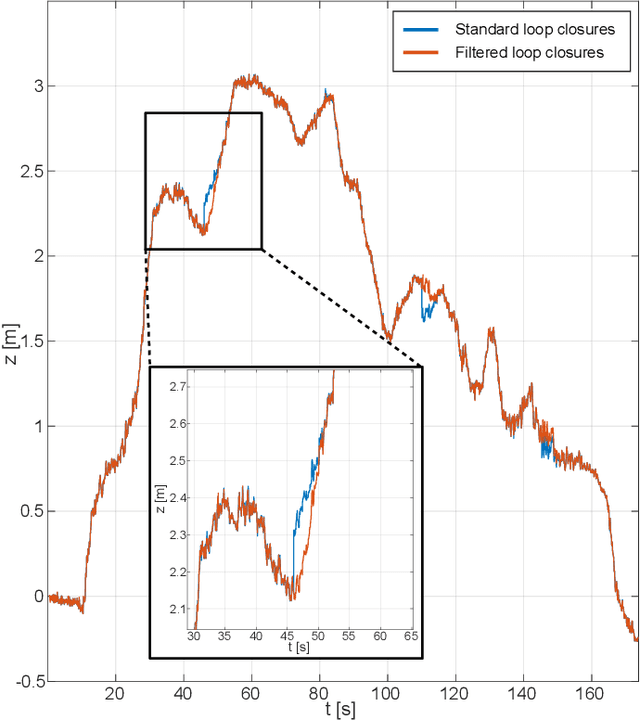
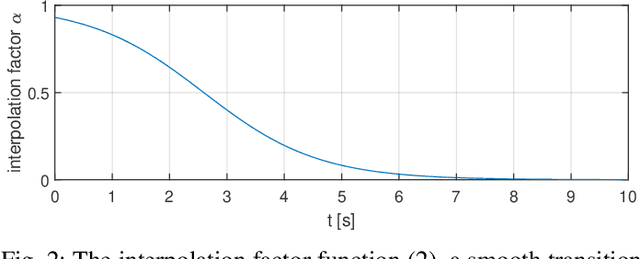
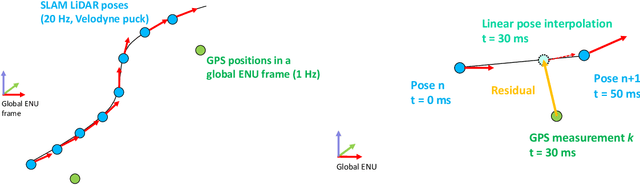
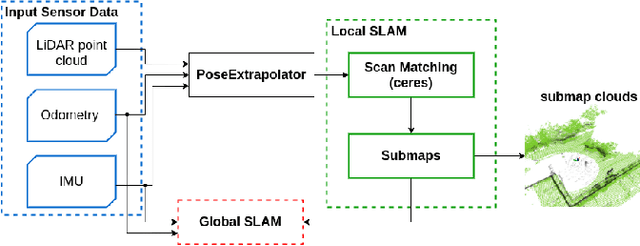
This paper describes an application of the Cartographer graph SLAM stack as a pose sensor in a UAV feedback control loop, with certain application-specific changes in the SLAM stack such as smoothing of the optimized pose. Pose estimation is performed by fusing 3D LiDAR/IMU-based proprioception with GPS position measurements by means of pose graph optimisation. Moreover, partial environment maps built from the LiDAR data (submaps) within the Cartographer SLAM stack are marshalled into OctoMap, an Octree-based voxel map implementation. The OctoMap is further used for navigation tasks such as path planning and obstacle avoidance.
A Comprehensive LiDAR-based SLAM Comparison for Control of Unmanned Aerial Vehicles
Nov 04, 2020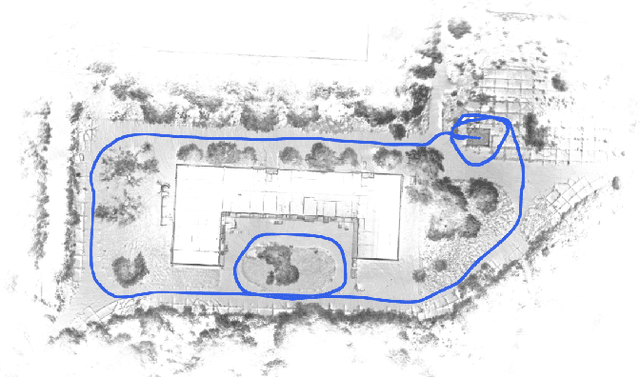

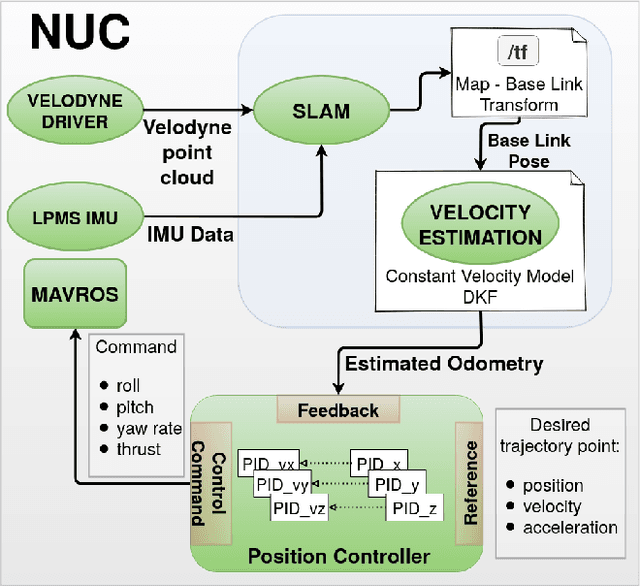
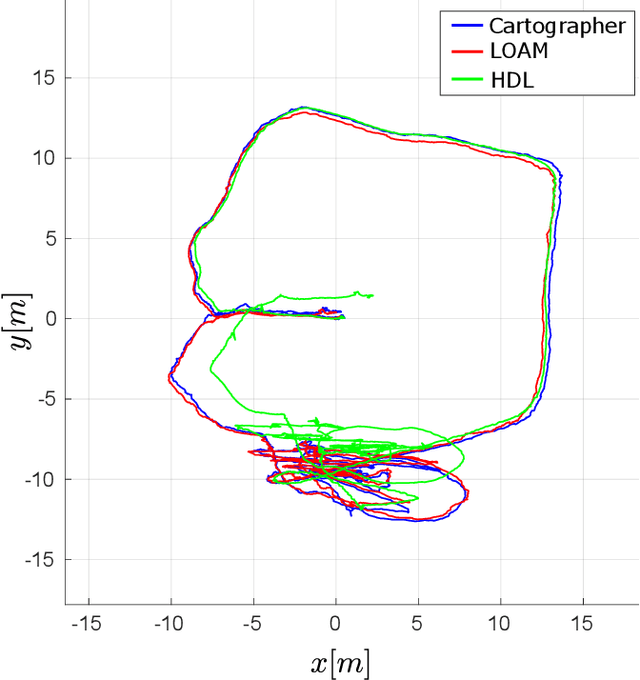
This paper investigates the use of LiDAR SLAM as a pose feedback for autonomous flight. Cartographer, LOAM and hdl graph SLAM are tested for this role. They are first compared offline on a series of datasets to see if they are capable of producing high-quality pose estimations in agile and long-range flight scenarios. The second stage of testing consists of integrating the SLAM algorithms into a cascade PID UAV control system and comparing the control system performance on step excitation signals and helical trajectories. The comparison is based on step response characteristics and several time integral performance criteria as well as the RMS error between planned and executed trajectory.