 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Irrigation Water Management: Estimating Soil Moisture Content by Feel and Appearance
Paper and Code
Jan 19, 2022

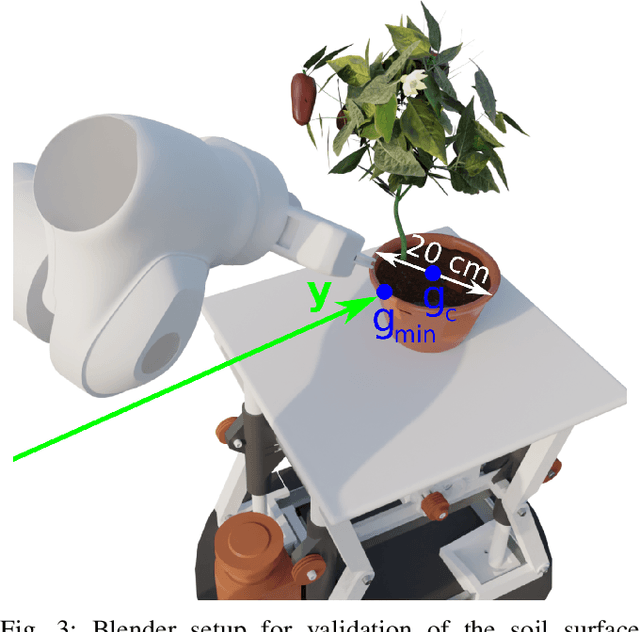

In this paper we propose a robotic system for Irrigation Water Management (IWM) in a structured robotic greenhouse environment. A commercially available robotic manipulator is equipped with an RGB-D camera and a soil moisture sensor. The two are used to automate the procedure known as "feel and appearance method", which is a way of monitoring soil moisture to determine when to irrigate and how much water to apply. We develop a compliant force control framework that enables the robot to insert the soil moisture sensor in the sensitive plant root zone of the soil, without harming the plant. RGB-D camera is used to roughly estimate the soil surface, in order to plan the soil sampling approach. Used together with the developed adaptive force control algorithm, the camera enables the robot to sample the soil without knowing the exact soil stiffness a priori. Finally, we postulate a deep learning based approach to utilize the camera to visually assess the soil health and moisture content.