 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception-Aware Communication-Free Multi-UAV Coordination in the Wild
Mar 09, 2026We present a communication-free method for safe multi-robot coordination in complex environments such as forests with dense canopy cover, where GNSS is unavailable. Our approach relies on an onboard anisotropic 3D LiDAR sensor used for SLAM as well as for detecting obstacles and neighboring robots. We develop a novel perception-aware 3D navigation framework that enables robots to safely and effectively progress toward a goal region despite limited sensor field-of-view. The approach is evaluated through extensive simulations across diverse scenarios and validated in real-world field experiments, demonstrating its scalability, robustness, and reliability.
DAPO: Design Structure-Aware Pass Ordering in High-Level Synthesis with Graph Contrastive and Reinforcement Learning
Dec 12, 2025High-Level Synthesis (HLS) tools are widely adopted in FPGA-based domain-specific accelerator design. However, existing tools rely on fixed optimization strategies inherited from software compilations, limiting their effectiveness. Tailoring optimization strategies to specific designs requires deep semantic understanding, accurate hardware metric estimation, and advanced search algorithms -- capabilities that current approaches lack. We propose DAPO, a design structure-aware pass ordering framework that extracts program semantics from control and data flow graphs, employs contrastive learning to generate rich embeddings, and leverages an analytical model for accurate hardware metric estimation. These components jointly guide a reinforcement learning agent to discover design-specific optimization strategies. Evaluations on classic HLS designs demonstrate that our end-to-end flow delivers a 2.36 speedup over Vitis HLS on average.
PACNav: Enhancing Collective Navigation for UAV Swarms in Communication-Challenged Environments
Apr 20, 2024This article presents Persistence Administered Collective Navigation (PACNav) as an approach for achieving decentralized collective navigation of Unmanned Aerial Vehicle (UAV) swarms. The technique is inspired by the flocking and collective navigation behavior observed in natural swarms, such as cattle herds, bird flocks, and even large groups of humans. PACNav relies solely on local observations of relative positions of UAVs, making it suitable for large swarms deprived of communication capabilities and external localization systems. We introduce the novel concepts of path persistence and path similarity, which allow each swarm member to analyze the motion of others. PACNav is grounded on two main principles: (1) UAVs with little variation in motion direction exhibit high path persistence and are considered reliable leaders by other UAVs; (2) groups of UAVs that move in a similar direction demonstrate high path similarity, and such groups are assumed to contain a reliable leader. The proposed approach also incorporates a reactive collision avoidance mechanism to prevent collisions with swarm members and environmental obstacles. The method is validated through simulated and real-world experiments conducted in a natural forest.
Accel-NASBench: Sustainable Benchmarking for Accelerator-Aware NAS
Apr 09, 2024



One of the primary challenges impeding the progress of Neural Architecture Search (NAS) is its extensive reliance on exorbitant computational resources. NAS benchmarks aim to simulate runs of NAS experiments at zero cost, remediating the need for extensive compute. However, existing NAS benchmarks use synthetic datasets and model proxies that make simplified assumptions about the characteristics of these datasets and models, leading to unrealistic evaluations. We present a technique that allows searching for training proxies that reduce the cost of benchmark construction by significant margins, making it possible to construct realistic NAS benchmarks for large-scale datasets. Using this technique, we construct an open-source bi-objective NAS benchmark for the ImageNet2012 dataset combined with the on-device performance of accelerators, including GPUs, TPUs, and FPGAs. Through extensive experimentation with various NAS optimizers and hardware platforms, we show that the benchmark is accurate and allows searching for state-of-the-art hardware-aware models at zero cost.
MRS Drone: A Modular Platform for Real-World Deployment of Aerial Multi-Robot Systems
Jun 12, 2023This paper presents a modular autonomous Unmanned Aerial Vehicle (UAV) platform called the Multi-robot Systems (MRS) Drone that can be used in a large range of indoor and outdoor applications. The MRS Drone features unique modularity with respect to changes in actuators, frames, and sensory configuration. As the name suggests, the platform is specially tailored for deployment within a MRS group. The MRS Drone contributes to the state-of-the-art of UAV platforms by allowing smooth real-world deployment of multiple aerial robots, as well as by outperforming other platforms with its modularity. For real-world multi-robot deployment in various applications, the platform is easy to both assemble and modify. Moreover, it is accompanied by a realistic simulator to enable safe pre-flight testing and a smooth transition to complex real-world experiments. In this manuscript, we present mechanical and electrical designs, software architecture, and technical specifications to build a fully autonomous multi UAV system. Finally, we demonstrate the full capabilities and the unique modularity of the MRS Drone in various real-world applications that required a diverse range of platform configurations.
PACNav: A collective navigation approach for UAV swarms deprived of communication and external localization
Feb 09, 2023This article proposes Persistence Administered Collective Navigation (PACNav) as an approach for achieving decentralized collective navigation of Unmanned Aerial Vehicle (UAV) swarms. The technique is based on the flocking and collective navigation behavior observed in natural swarms, such as cattle herds, bird flocks, and even large groups of humans. As global and concurrent information of all swarm members is not available in natural swarms, these systems use local observations to achieve the desired behavior. Similarly, PACNav relies only on local observations of relative positions of UAVs, making it suitable for large swarms deprived of communication capabilities and external localization systems. We introduce the novel concepts of path persistence and path similarity that allow each swarm member to analyze the motion of other members in order to determine its own future motion. PACNav is based on two main principles: (1) UAVs with little variation in motion direction have high path persistence, and are considered by other UAVs to be reliable leaders; (2) groups of UAVs that move in a similar direction have high path similarity, and such groups are assumed to contain a reliable leader. The proposed approach also embeds a reactive collision avoidance mechanism to avoid collisions with swarm members and environmental obstacles. This collision avoidance ensures safety while reducing deviations from the assigned path. Along with several simulated experiments, we present a real-world experiment in a natural forest, showcasing the validity and effectiveness of the proposed collective navigation approach in challenging environments. The source code is released as open-source, making it possible to replicate the obtained results and facilitate the continuation of research by the community.
* 17 pages, 16 figures, journal paper
Towards Design Space Exploration and Optimization of Fast Algorithms for Convolutional Neural Networks (CNNs) on FPGAs
Mar 05, 2019
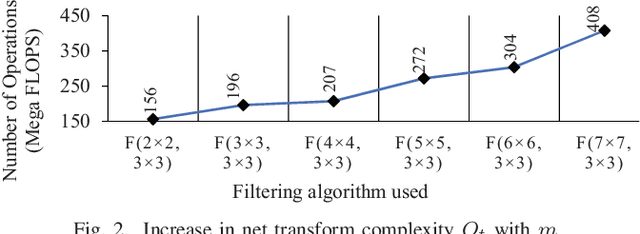
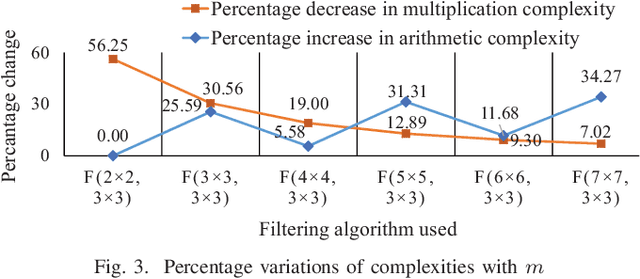
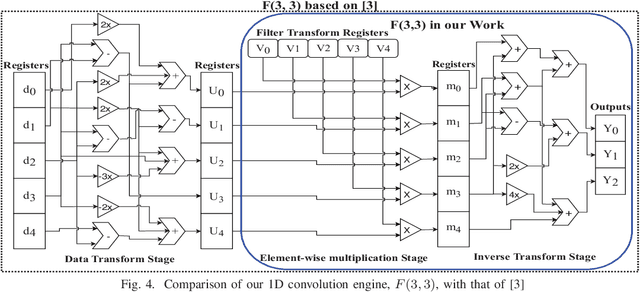
Convolutional Neural Networks (CNNs) have gained widespread popularity in the field of computer vision and image processing. Due to huge computational requirements of CNNs, dedicated hardware-based implementations are being explored to improve their performance. Hardware platforms such as Field Programmable Gate Arrays (FPGAs) are widely being used to design parallel architectures for this purpose. In this paper, we analyze Winograd minimal filtering or fast convolution algorithms to reduce the arithmetic complexity of convolutional layers of CNNs. We explore a complex design space to find the sets of parameters that result in improved throughput and power-efficiency. We also design a pipelined and parallel Winograd convolution engine that improves the throughput and power-efficiency while reducing the computational complexity of the overall system. Our proposed designs show up to 4.75$\times$ and 1.44$\times$ improvements in throughput and power-efficiency, respectively, in comparison to the state-of-the-art design while using approximately 2.67$\times$ more multipliers. Furthermore, we obtain savings of up to 53.6\% in logic resources compared with the state-of-the-art implementation.