 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategic Maneuver and Disruption with Reinforcement Learning Approaches for Multi-Agent Coordination
Mar 17, 2022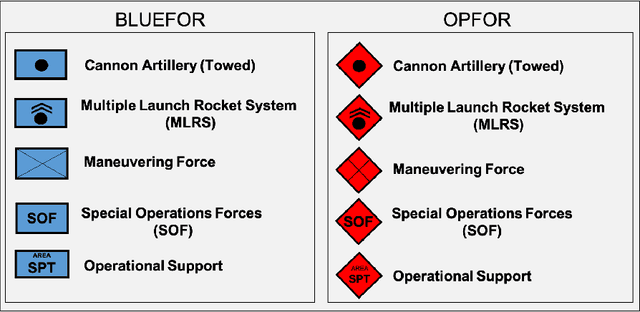
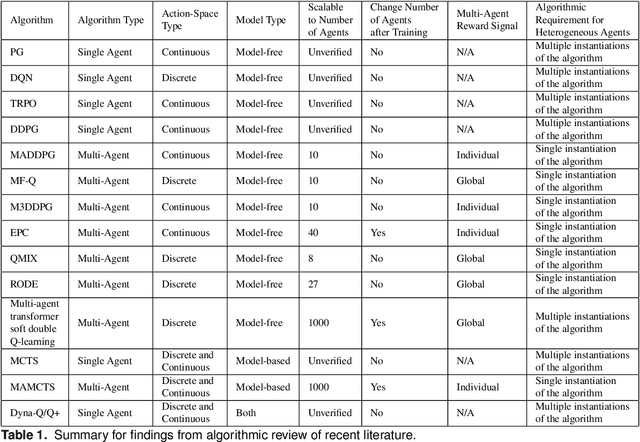
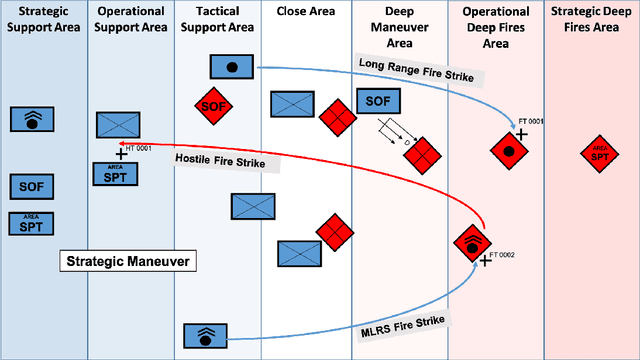
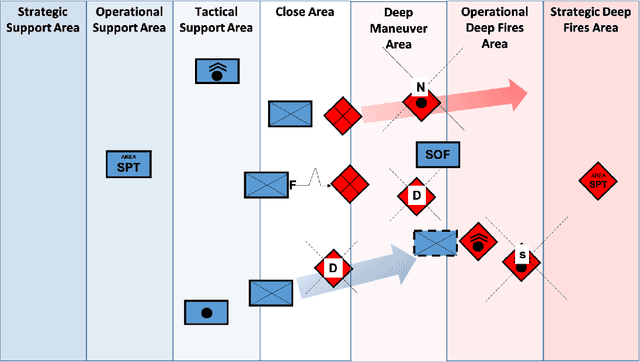
Reinforcement learning (RL) approaches can illuminate emergent behaviors that facilitate coordination across teams of agents as part of a multi-agent system (MAS), which can provide windows of opportunity in various military tasks. Technologically advancing adversaries pose substantial risks to a friendly nation's interests and resources. Superior resources alone are not enough to defeat adversaries in modern complex environments because adversaries create standoff in multiple domains against predictable military doctrine-based maneuvers. Therefore, as part of a defense strategy, friendly forces must use strategic maneuvers and disruption to gain superiority in complex multi-faceted domains such as multi-domain operations (MDO). One promising avenue for implementing strategic maneuver and disruption to gain superiority over adversaries is through coordination of MAS in future military operations. In this paper, we present overviews of prominent works in the RL domain with their strengths and weaknesses for overcoming the challenges associated with performing autonomous strategic maneuver and disruption in military contexts.
Survey of Recent Multi-Agent Reinforcement Learning Algorithms Utilizing Centralized Training
Jul 29, 2021Much work has been dedicated to the exploration of Multi-Agent Reinforcement Learning (MARL) paradigms implementing a centralized learning with decentralized execution (CLDE) approach to achieve human-like collaboration in cooperative tasks. Here, we discuss variations of centralized training and describe a recent survey of algorithmic approaches. The goal is to explore how different implementations of information sharing mechanism in centralized learning may give rise to distinct group coordinated behaviors in multi-agent systems performing cooperative tasks.
* This article appeared in the news at: https://www.army.mil/article/247261/army_researchers_develop_innovative_framework_for_training_ai
Interaction and Autonomy in RoboCup@Home and Building-Wide Intelligence
Oct 06, 2018
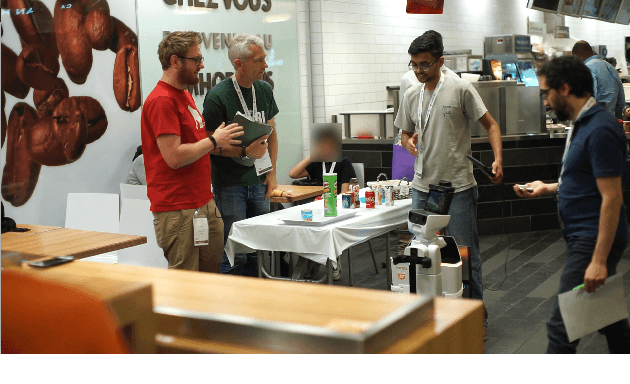
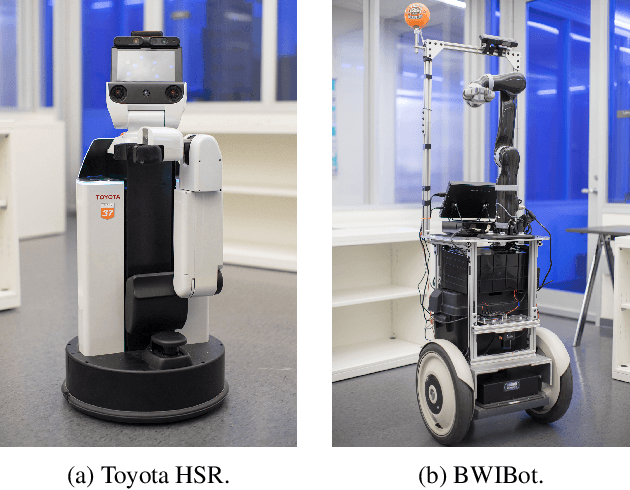
Efforts are underway at UT Austin to build autonomous robot systems that address the challenges of long-term deployments in office environments and of the more prescribed domestic service tasks of the RoboCup@Home competition. We discuss the contrasts and synergies of these efforts, highlighting how our work to build a RoboCup@Home Domestic Standard Platform League entry led us to identify an integrated software architecture that could support both projects. Further, naturalistic deployments of our office robot platform as part of the Building-Wide Intelligence project have led us to identify and research new problems in a traditional laboratory setting.