Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteraction and Autonomy in RoboCup@Home and Building-Wide Intelligence
Paper and Code
Oct 06, 2018
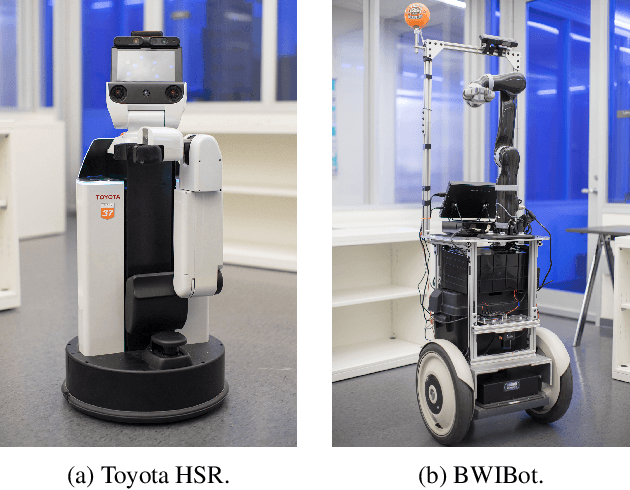
Efforts are underway at UT Austin to build autonomous robot systems that address the challenges of long-term deployments in office environments and of the more prescribed domestic service tasks of the RoboCup@Home competition. We discuss the contrasts and synergies of these efforts, highlighting how our work to build a RoboCup@Home Domestic Standard Platform League entry led us to identify an integrated software architecture that could support both projects. Further, naturalistic deployments of our office robot platform as part of the Building-Wide Intelligence project have led us to identify and research new problems in a traditional laboratory setting.
* Presented at AI-HRI AAAI-FSS, 2018 (arXiv:1809.06606)
View paper on