 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Domain-Agnostic Approach for Characterization of Lifelong Learning Systems
Jan 18, 2023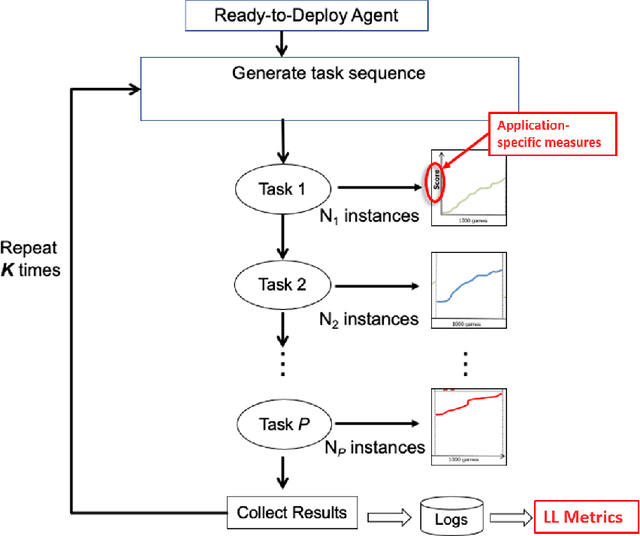
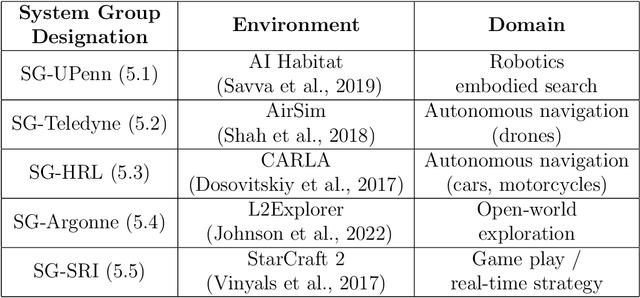


Despite the advancement of machine learning techniques in recent years, state-of-the-art systems lack robustness to "real world" events, where the input distributions and tasks encountered by the deployed systems will not be limited to the original training context, and systems will instead need to adapt to novel distributions and tasks while deployed. This critical gap may be addressed through the development of "Lifelong Learning" systems that are capable of 1) Continuous Learning, 2) Transfer and Adaptation, and 3) Scalability. Unfortunately, efforts to improve these capabilities are typically treated as distinct areas of research that are assessed independently, without regard to the impact of each separate capability on other aspects of the system. We instead propose a holistic approach, using a suite of metrics and an evaluation framework to assess Lifelong Learning in a principled way that is agnostic to specific domains or system techniques. Through five case studies, we show that this suite of metrics can inform the development of varied and complex Lifelong Learning systems. We highlight how the proposed suite of metrics quantifies performance trade-offs present during Lifelong Learning system development - both the widely discussed Stability-Plasticity dilemma and the newly proposed relationship between Sample Efficient and Robust Learning. Further, we make recommendations for the formulation and use of metrics to guide the continuing development of Lifelong Learning systems and assess their progress in the future.
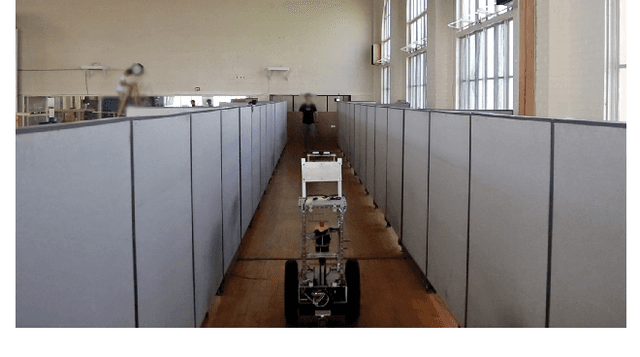
Learning Perceptual Hallucination for Multi-Robot Navigation in Narrow Hallways
Sep 27, 2022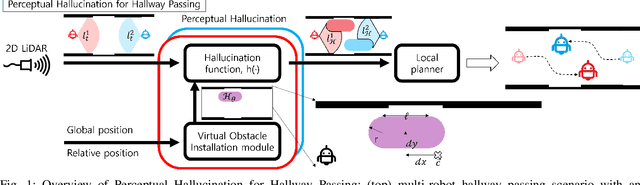
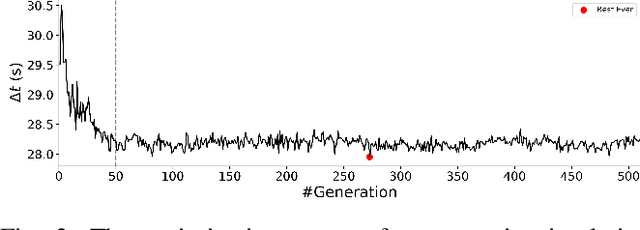
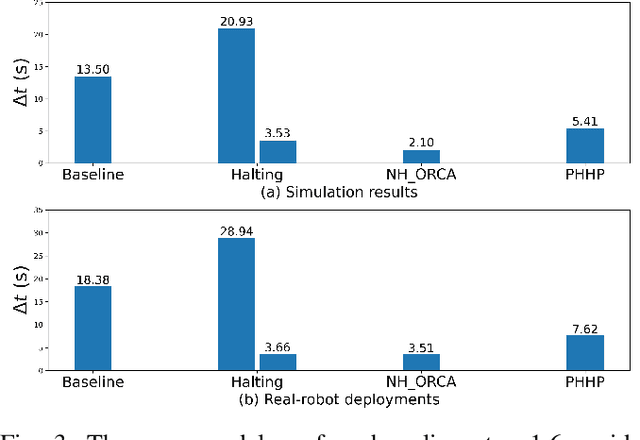
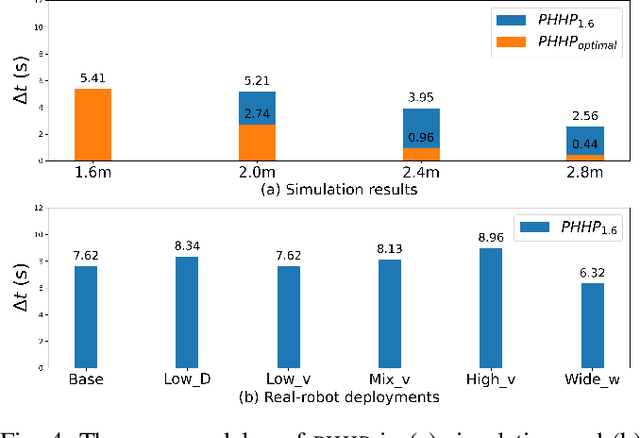
While current systems for autonomous robot navigation can produce safe and efficient motion plans in static environments, they usually generate suboptimal behaviors when multiple robots must navigate together in confined spaces. For example, when two robots meet each other in a narrow hallway, they may either turn around to find an alternative route or collide with each other. This paper presents a new approach to navigation that allows two robots to pass each other in a narrow hallway without colliding, stopping, or waiting. Our approach, Perceptual Hallucination for Hallway Passing (PHHP), learns to synthetically generate virtual obstacles (i.e., perceptual hallucination) to facilitate passing in narrow hallways by multiple robots that utilize otherwise standard autonomous navigation systems. Our experiments on physical robots in a variety of hallways show improved performance compared to multiple baselines.
Sequential Online Chore Division for Autonomous Vehicle Convoy Formation
Apr 09, 2021
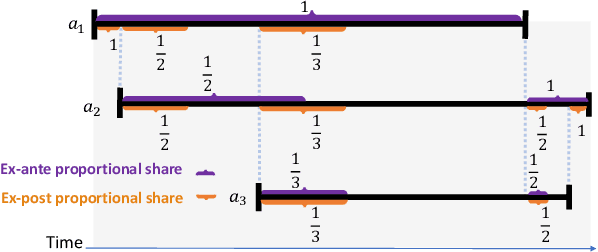
Chore division is a class of fair division problems in which some undesirable "resource" must be shared among a set of participants, with each participant wanting to get as little as possible. Typically the set of participants is fixed and known at the outset. This paper introduces a novel variant, called sequential online chore division (SOCD), in which participants arrive and depart online, while the chore is being performed: both the total number of participants and their arrival/departure times are initially unknown. In SOCD, exactly one agent must be performing the chore at any give time (e.g. keeping lookout), and switching the performer incurs a cost. In this paper, we propose and analyze three mechanisms for SOCD: one centralized mechanism using side payments, and two distributed ones that seek to balance the participants' loads. Analysis and results are presented in a domain motivated by autonomous vehicle convoy formation, where the chore is leading the convoy so that all followers can enjoy reduced wind resistance.
A Scavenger Hunt for Service Robots
Mar 29, 2021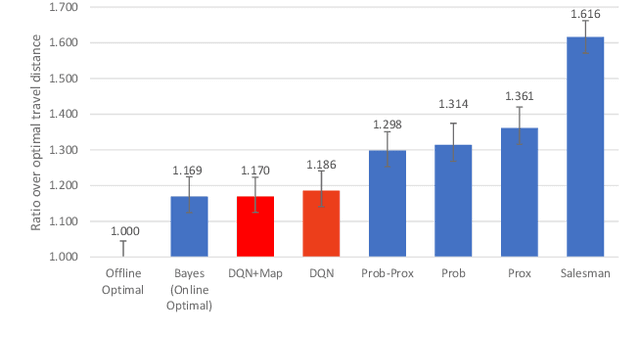
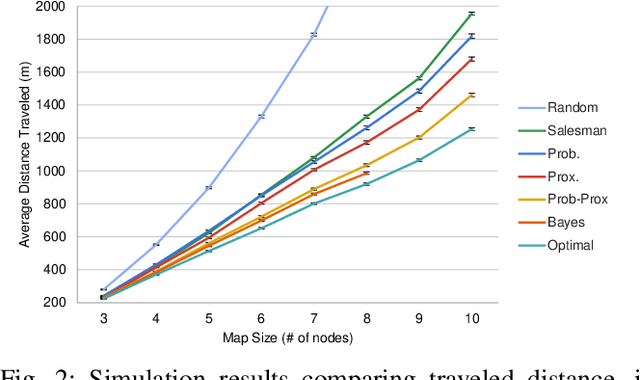
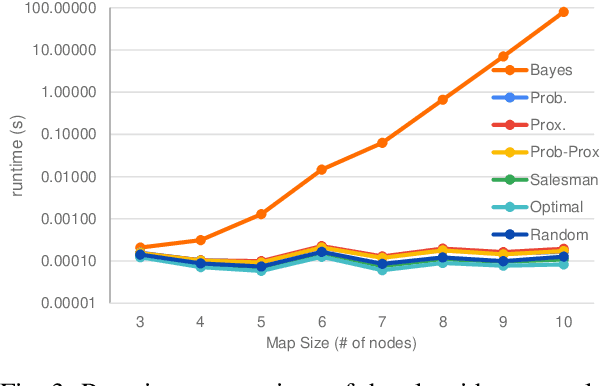

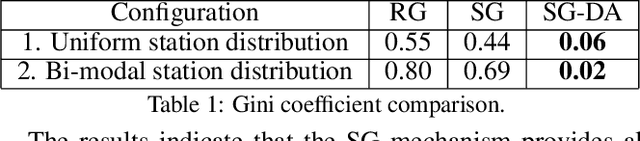
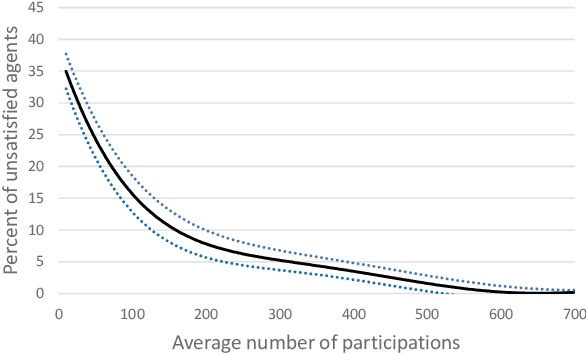
Creating robots that can perform general-purpose service tasks in a human-populated environment has been a longstanding grand challenge for AI and Robotics research. One particularly valuable skill that is relevant to a wide variety of tasks is the ability to locate and retrieve objects upon request. This paper models this skill as a Scavenger Hunt (SH) game, which we formulate as a variation of the NP-hard stochastic traveling purchaser problem. In this problem, the goal is to find a set of objects as quickly as possible, given probability distributions of where they may be found. We investigate the performance of several solution algorithms for the SH problem, both in simulation and on a real mobile robot. We use Reinforcement Learning (RL) to train an agent to plan a minimal cost path, and show that the RL agent can outperform a range of heuristic algorithms, achieving near optimal performance. In order to stimulate research on this problem, we introduce a publicly available software stack and associated website that enable users to upload scavenger hunts which robots can download, perform, and learn from to continually improve their performance on future hunts.
* 6 pages + references + Appendix
Scalable Multiagent Driving Policies For Reducing Traffic Congestion
Feb 26, 2021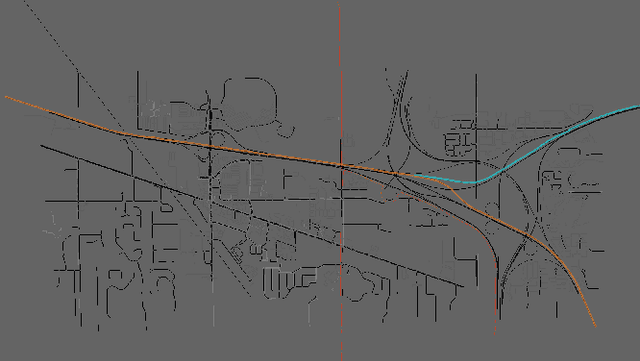

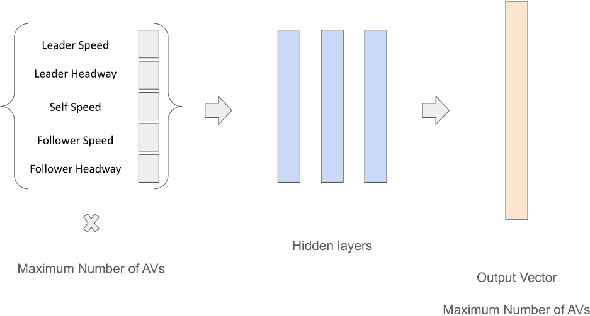

Traffic congestion is a major challenge in modern urban settings. The industry-wide development of autonomous and automated vehicles (AVs) motivates the question of how can AVs contribute to congestion reduction. Past research has shown that in small scale mixed traffic scenarios with both AVs and human-driven vehicles, a small fraction of AVs executing a controlled multiagent driving policy can mitigate congestion. In this paper, we scale up existing approaches and develop new multiagent driving policies for AVs in scenarios with greater complexity. We start by showing that a congestion metric used by past research is manipulable in open road network scenarios where vehicles dynamically join and leave the road. We then propose using a different metric that is robust to manipulation and reflects open network traffic efficiency. Next, we propose a modular transfer reinforcement learning approach, and use it to scale up a multiagent driving policy to outperform human-like traffic and existing approaches in a simulated realistic scenario, which is an order of magnitude larger than past scenarios (hundreds instead of tens of vehicles). Additionally, our modular transfer learning approach saves up to 80% of the training time in our experiments, by focusing its data collection on key locations in the network. Finally, we show for the first time a distributed multiagent policy that improves congestion over human-driven traffic. The distributed approach is more realistic and practical, as it relies solely on existing sensing and actuation capabilities, and does not require adding new communication infrastructure.
Improving Grounded Natural Language Understanding through Human-Robot Dialog
Mar 01, 2019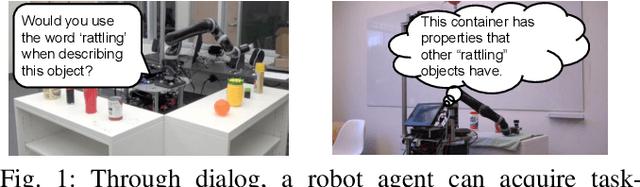
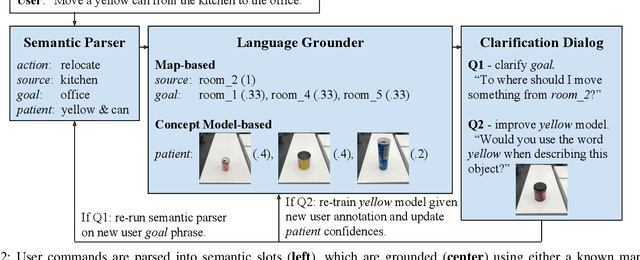
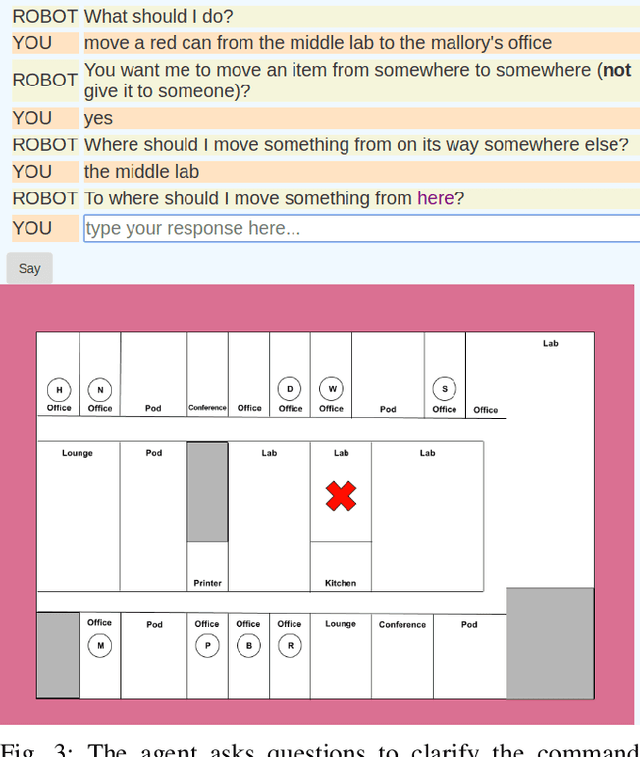
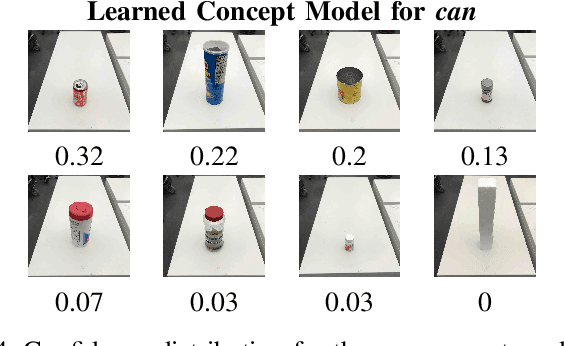
Natural language understanding for robotics can require substantial domain- and platform-specific engineering. For example, for mobile robots to pick-and-place objects in an environment to satisfy human commands, we can specify the language humans use to issue such commands, and connect concept words like red can to physical object properties. One way to alleviate this engineering for a new domain is to enable robots in human environments to adapt dynamically---continually learning new language constructions and perceptual concepts. In this work, we present an end-to-end pipeline for translating natural language commands to discrete robot actions, and use clarification dialogs to jointly improve language parsing and concept grounding. We train and evaluate this agent in a virtual setting on Amazon Mechanical Turk, and we transfer the learned agent to a physical robot platform to demonstrate it in the real world.
Interaction and Autonomy in RoboCup@Home and Building-Wide Intelligence
Oct 06, 2018
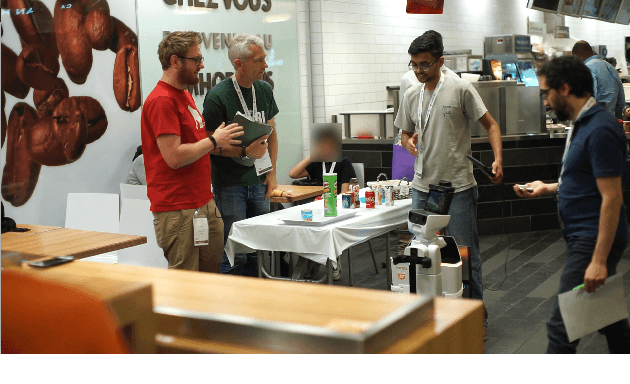
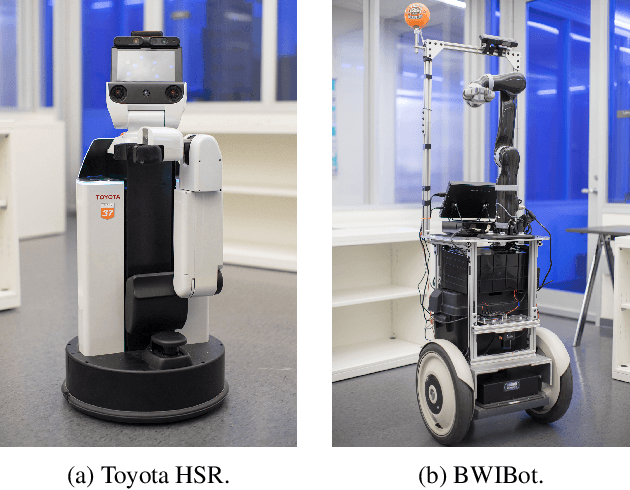
Efforts are underway at UT Austin to build autonomous robot systems that address the challenges of long-term deployments in office environments and of the more prescribed domestic service tasks of the RoboCup@Home competition. We discuss the contrasts and synergies of these efforts, highlighting how our work to build a RoboCup@Home Domestic Standard Platform League entry led us to identify an integrated software architecture that could support both projects. Further, naturalistic deployments of our office robot platform as part of the Building-Wide Intelligence project have led us to identify and research new problems in a traditional laboratory setting.