 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma 2: Improving Open Language Models at a Practical Size
Aug 02, 2024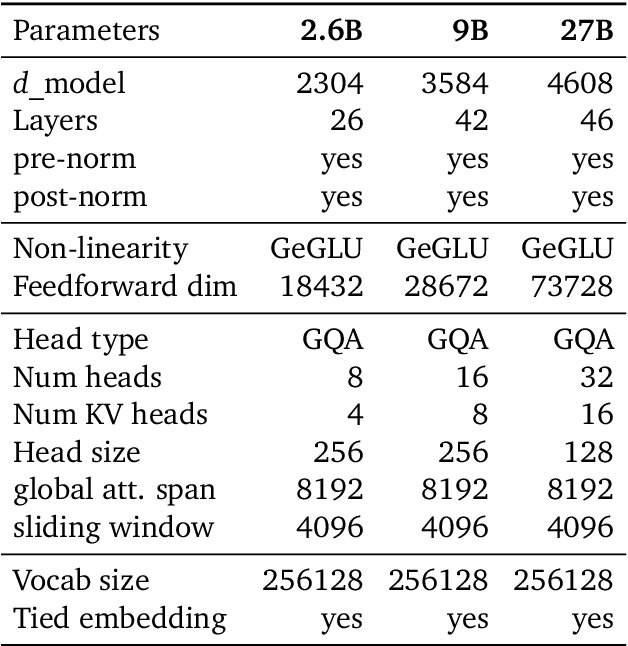
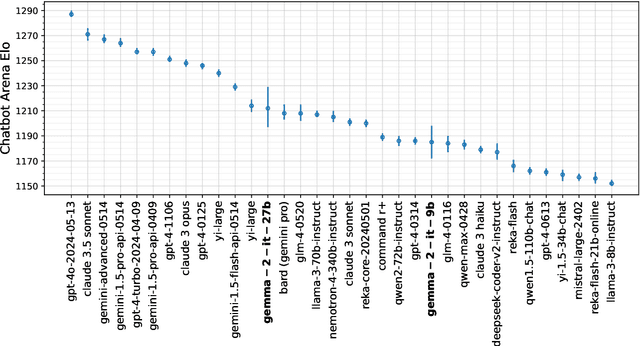
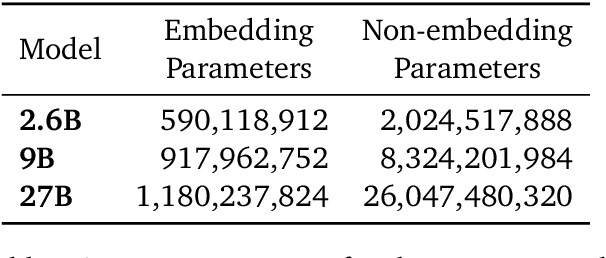
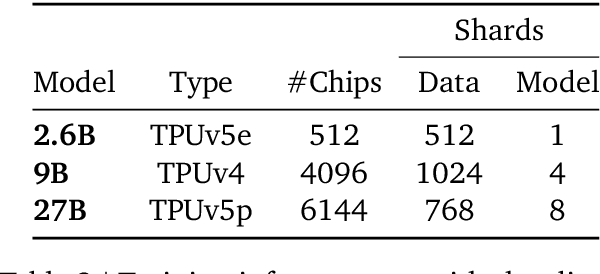
In this work, we introduce Gemma 2, a new addition to the Gemma family of lightweight, state-of-the-art open models, ranging in scale from 2 billion to 27 billion parameters. In this new version, we apply several known technical modifications to the Transformer architecture, such as interleaving local-global attentions (Beltagy et al., 2020a) and group-query attention (Ainslie et al., 2023). We also train the 2B and 9B models with knowledge distillation (Hinton et al., 2015) instead of next token prediction. The resulting models deliver the best performance for their size, and even offer competitive alternatives to models that are 2-3 times bigger. We release all our models to the community.
Can Long-Context Language Models Subsume Retrieval, RAG, SQL, and More?
Jun 19, 2024


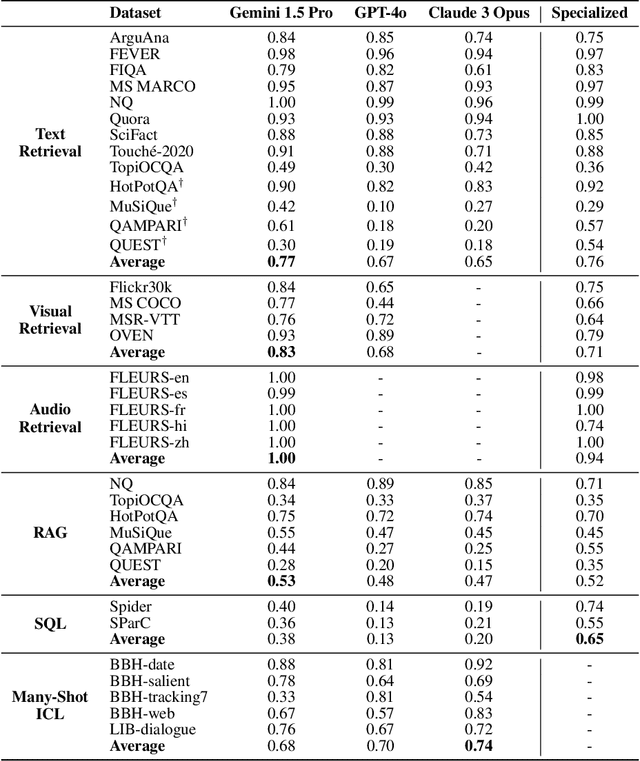
Long-context language models (LCLMs) have the potential to revolutionize our approach to tasks traditionally reliant on external tools like retrieval systems or databases. Leveraging LCLMs' ability to natively ingest and process entire corpora of information offers numerous advantages. It enhances user-friendliness by eliminating the need for specialized knowledge of tools, provides robust end-to-end modeling that minimizes cascading errors in complex pipelines, and allows for the application of sophisticated prompting techniques across the entire system. To assess this paradigm shift, we introduce LOFT, a benchmark of real-world tasks requiring context up to millions of tokens designed to evaluate LCLMs' performance on in-context retrieval and reasoning. Our findings reveal LCLMs' surprising ability to rival state-of-the-art retrieval and RAG systems, despite never having been explicitly trained for these tasks. However, LCLMs still face challenges in areas like compositional reasoning that are required in SQL-like tasks. Notably, prompting strategies significantly influence performance, emphasizing the need for continued research as context lengths grow. Overall, LOFT provides a rigorous testing ground for LCLMs, showcasing their potential to supplant existing paradigms and tackle novel tasks as model capabilities scale.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
RoboCLIP: One Demonstration is Enough to Learn Robot Policies
Oct 11, 2023



Reward specification is a notoriously difficult problem in reinforcement learning, requiring extensive expert supervision to design robust reward functions. Imitation learning (IL) methods attempt to circumvent these problems by utilizing expert demonstrations but typically require a large number of in-domain expert demonstrations. Inspired by advances in the field of Video-and-Language Models (VLMs), we present RoboCLIP, an online imitation learning method that uses a single demonstration (overcoming the large data requirement) in the form of a video demonstration or a textual description of the task to generate rewards without manual reward function design. Additionally, RoboCLIP can also utilize out-of-domain demonstrations, like videos of humans solving the task for reward generation, circumventing the need to have the same demonstration and deployment domains. RoboCLIP utilizes pretrained VLMs without any finetuning for reward generation. Reinforcement learning agents trained with RoboCLIP rewards demonstrate 2-3 times higher zero-shot performance than competing imitation learning methods on downstream robot manipulation tasks, doing so using only one video/text demonstration.
Policy-Induced Self-Supervision Improves Representation Finetuning in Visual RL
Feb 12, 2023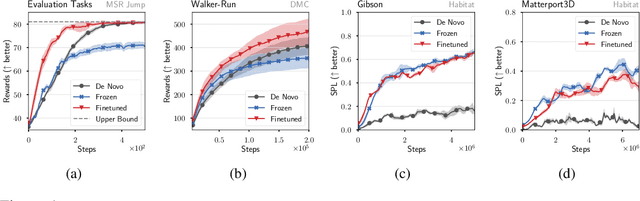
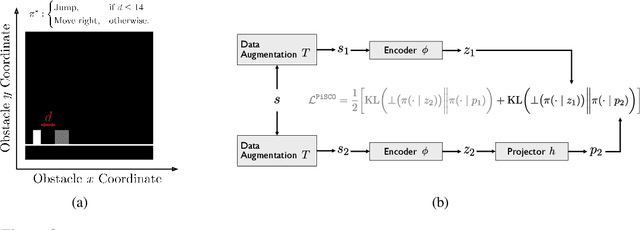
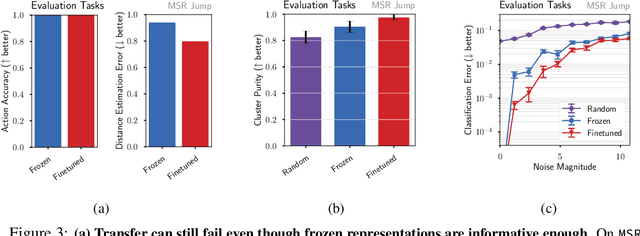
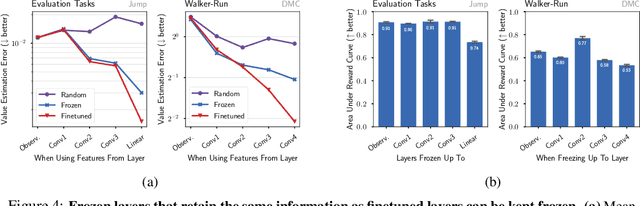
We study how to transfer representations pretrained on source tasks to target tasks in visual percept based RL. We analyze two popular approaches: freezing or finetuning the pretrained representations. Empirical studies on a set of popular tasks reveal several properties of pretrained representations. First, finetuning is required even when pretrained representations perfectly capture the information required to solve the target task. Second, finetuned representations improve learnability and are more robust to noise. Third, pretrained bottom layers are task-agnostic and readily transferable to new tasks, while top layers encode task-specific information and require adaptation. Building on these insights, we propose a self-supervised objective that clusters representations according to the policy they induce, as opposed to traditional representation similarity measures which are policy-agnostic (e.g. Euclidean norm, cosine similarity). Together with freezing the bottom layers, this objective results in significantly better representation than frozen, finetuned, and self-supervised alternatives on a wide range of benchmarks.
A Domain-Agnostic Approach for Characterization of Lifelong Learning Systems
Jan 18, 2023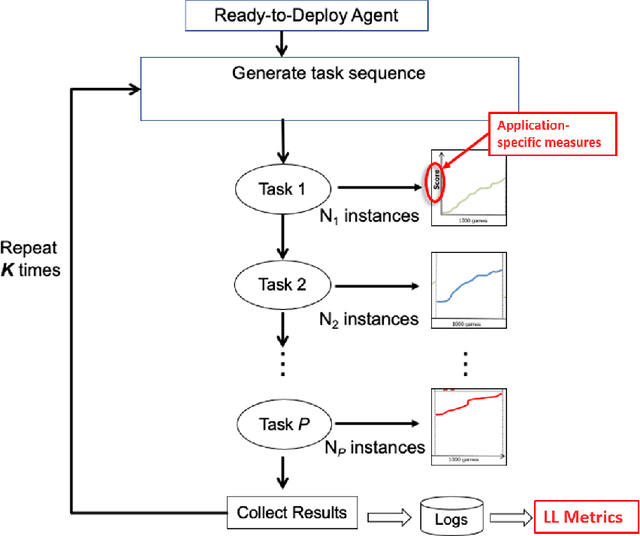
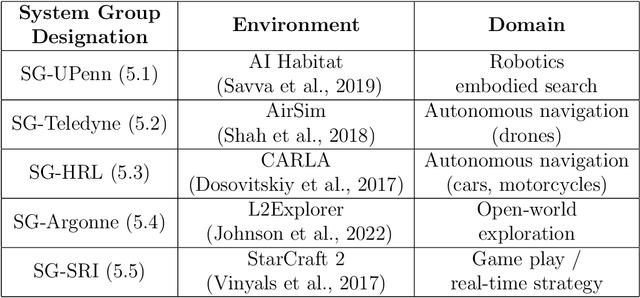


Despite the advancement of machine learning techniques in recent years, state-of-the-art systems lack robustness to "real world" events, where the input distributions and tasks encountered by the deployed systems will not be limited to the original training context, and systems will instead need to adapt to novel distributions and tasks while deployed. This critical gap may be addressed through the development of "Lifelong Learning" systems that are capable of 1) Continuous Learning, 2) Transfer and Adaptation, and 3) Scalability. Unfortunately, efforts to improve these capabilities are typically treated as distinct areas of research that are assessed independently, without regard to the impact of each separate capability on other aspects of the system. We instead propose a holistic approach, using a suite of metrics and an evaluation framework to assess Lifelong Learning in a principled way that is agnostic to specific domains or system techniques. Through five case studies, we show that this suite of metrics can inform the development of varied and complex Lifelong Learning systems. We highlight how the proposed suite of metrics quantifies performance trade-offs present during Lifelong Learning system development - both the widely discussed Stability-Plasticity dilemma and the newly proposed relationship between Sample Efficient and Robust Learning. Further, we make recommendations for the formulation and use of metrics to guide the continuing development of Lifelong Learning systems and assess their progress in the future.
Uniform Sampling over Episode Difficulty
Aug 03, 2021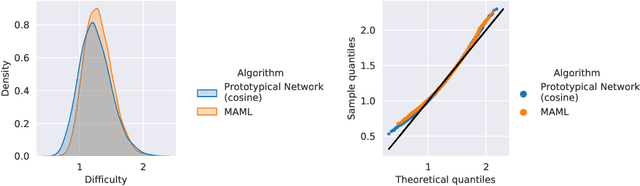
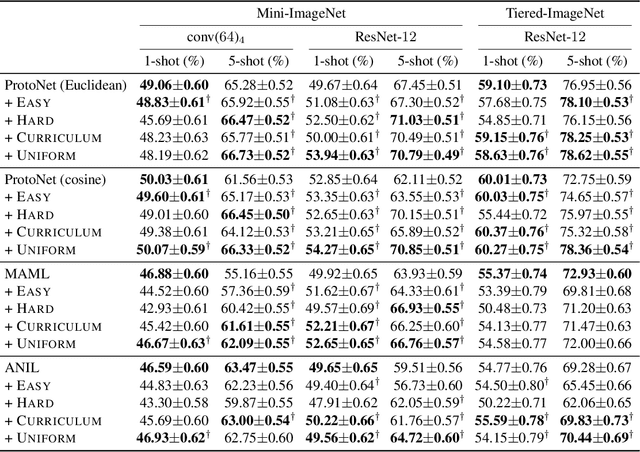
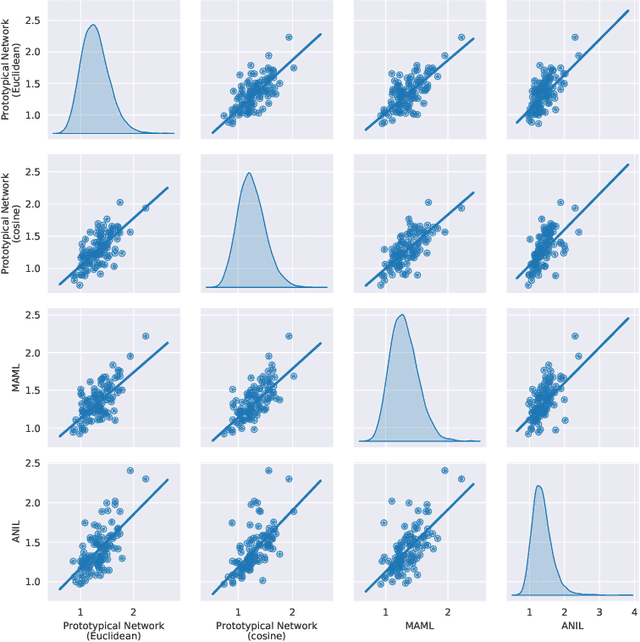
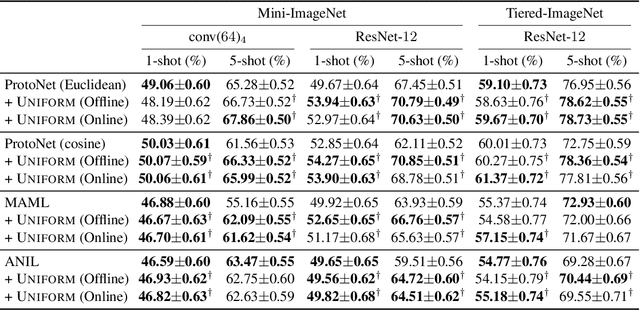
Episodic training is a core ingredient of few-shot learning to train models on tasks with limited labelled data. Despite its success, episodic training remains largely understudied, prompting us to ask the question: what is the best way to sample episodes? In this paper, we first propose a method to approximate episode sampling distributions based on their difficulty. Building on this method, we perform an extensive analysis and find that sampling uniformly over episode difficulty outperforms other sampling schemes, including curriculum and easy-/hard-mining. As the proposed sampling method is algorithm agnostic, we can leverage these insights to improve few-shot learning accuracies across many episodic training algorithms. We demonstrate the efficacy of our method across popular few-shot learning datasets, algorithms, network architectures, and protocols.
Embedding Adaptation is Still Needed for Few-Shot Learning
Apr 15, 2021
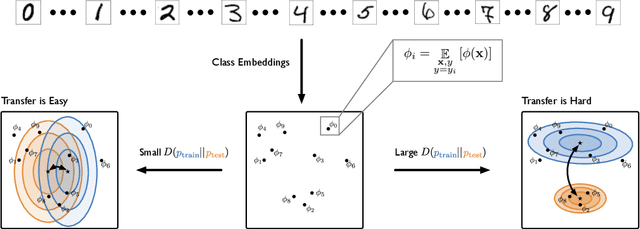
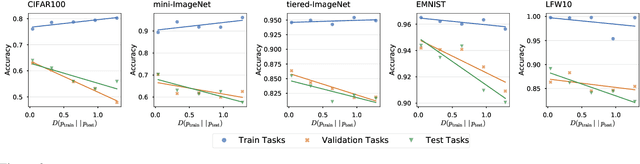
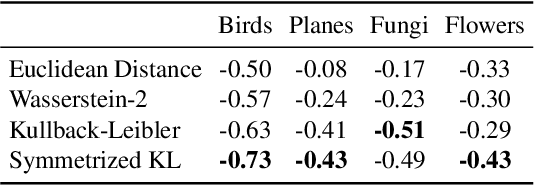
Constructing new and more challenging tasksets is a fruitful methodology to analyse and understand few-shot classification methods. Unfortunately, existing approaches to building those tasksets are somewhat unsatisfactory: they either assume train and test task distributions to be identical -- which leads to overly optimistic evaluations -- or take a "worst-case" philosophy -- which typically requires additional human labor such as obtaining semantic class relationships. We propose ATG, a principled clustering method to defining train and test tasksets without additional human knowledge. ATG models train and test task distributions while requiring them to share a predefined amount of information. We empirically demonstrate the effectiveness of ATG in generating tasksets that are easier, in-between, or harder than existing benchmarks, including those that rely on semantic information. Finally, we leverage our generated tasksets to shed a new light on few-shot classification: gradient-based methods -- previously believed to underperform -- can outperform metric-based ones when transfer is most challenging.
learn2learn: A Library for Meta-Learning Research
Aug 28, 2020Meta-learning researchers face two fundamental issues in their empirical work: prototyping and reproducibility. Researchers are prone to make mistakes when prototyping new algorithms and tasks because modern meta-learning methods rely on unconventional functionalities of machine learning frameworks. In turn, reproducing existing results becomes a tedious endeavour -- a situation exacerbated by the lack of standardized implementations and benchmarks. As a result, researchers spend inordinate amounts of time on implementing software rather than understanding and developing new ideas. This manuscript introduces learn2learn, a library for meta-learning research focused on solving those prototyping and reproducibility issues. learn2learn provides low-level routines common across a wide-range of meta-learning techniques (e.g. meta-descent, meta-reinforcement learning, few-shot learning), and builds standardized interfaces to algorithms and benchmarks on top of them. In releasing learn2learn under a free and open source license, we hope to foster a community around standardized software for meta-learning research.
Decoupling Adaptation from Modeling with Meta-Optimizers for Meta Learning
Oct 30, 2019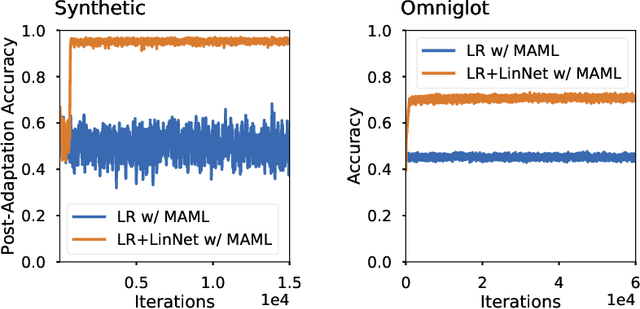

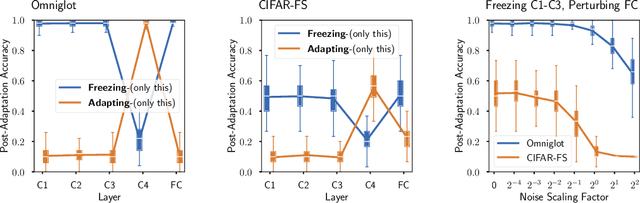

Meta-learning methods, most notably Model-Agnostic Meta-Learning or MAML, have achieved great success in adapting to new tasks quickly, after having been trained on similar tasks. The mechanism behind their success, however, is poorly understood. We begin this work with an experimental analysis of MAML, finding that deep models are crucial for its success, even given sets of simple tasks where a linear model would suffice on any individual task. Furthermore, on image-recognition tasks, we find that the early layers of MAML-trained models learn task-invariant features, while later layers are used for adaptation, providing further evidence that these models require greater capacity than is strictly necessary for their individual tasks. Following our findings, we propose a method which enables better use of model capacity at inference time by separating the adaptation aspect of meta-learning into parameters that are only used for adaptation but are not part of the forward model. We find that our approach enables more effective meta-learning in smaller models, which are suitably sized for the individual tasks.