 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy-Induced Self-Supervision Improves Representation Finetuning in Visual RL
Paper and Code
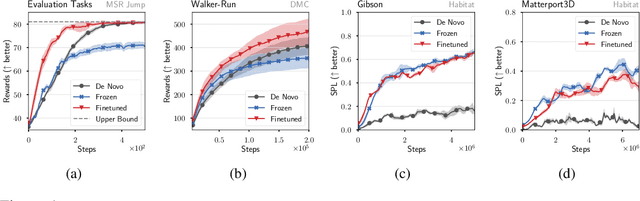
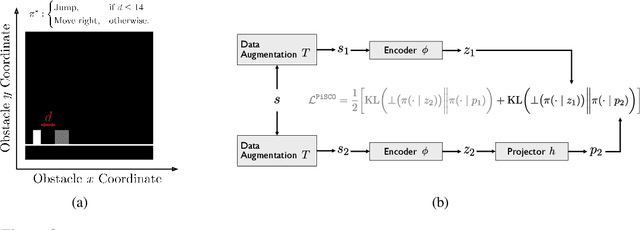
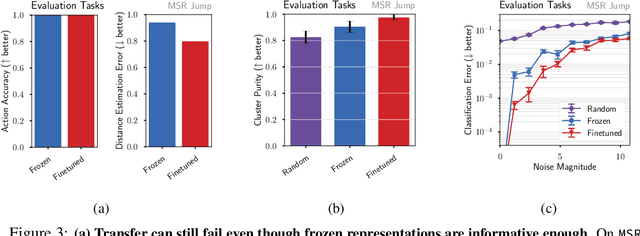
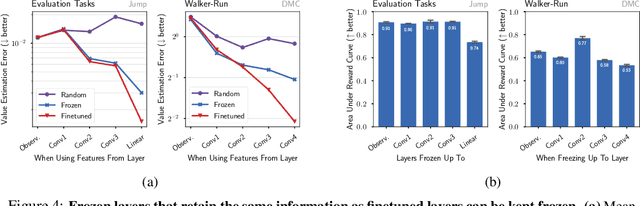
We study how to transfer representations pretrained on source tasks to target tasks in visual percept based RL. We analyze two popular approaches: freezing or finetuning the pretrained representations. Empirical studies on a set of popular tasks reveal several properties of pretrained representations. First, finetuning is required even when pretrained representations perfectly capture the information required to solve the target task. Second, finetuned representations improve learnability and are more robust to noise. Third, pretrained bottom layers are task-agnostic and readily transferable to new tasks, while top layers encode task-specific information and require adaptation. Building on these insights, we propose a self-supervised objective that clusters representations according to the policy they induce, as opposed to traditional representation similarity measures which are policy-agnostic (e.g. Euclidean norm, cosine similarity). Together with freezing the bottom layers, this objective results in significantly better representation than frozen, finetuned, and self-supervised alternatives on a wide range of benchmarks.