 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Multiagent Driving Policies For Reducing Traffic Congestion
Paper and Code
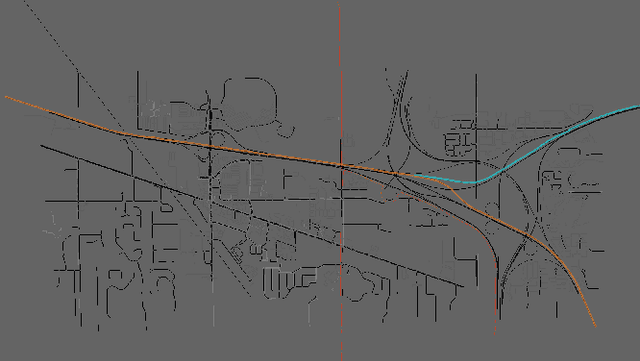


Traffic congestion is a major challenge in modern urban settings. The industry-wide development of autonomous and automated vehicles (AVs) motivates the question of how can AVs contribute to congestion reduction. Past research has shown that in small scale mixed traffic scenarios with both AVs and human-driven vehicles, a small fraction of AVs executing a controlled multiagent driving policy can mitigate congestion. In this paper, we scale up existing approaches and develop new multiagent driving policies for AVs in scenarios with greater complexity. We start by showing that a congestion metric used by past research is manipulable in open road network scenarios where vehicles dynamically join and leave the road. We then propose using a different metric that is robust to manipulation and reflects open network traffic efficiency. Next, we propose a modular transfer reinforcement learning approach, and use it to scale up a multiagent driving policy to outperform human-like traffic and existing approaches in a simulated realistic scenario, which is an order of magnitude larger than past scenarios (hundreds instead of tens of vehicles). Additionally, our modular transfer learning approach saves up to 80% of the training time in our experiments, by focusing its data collection on key locations in the network. Finally, we show for the first time a distributed multiagent policy that improves congestion over human-driven traffic. The distributed approach is more realistic and practical, as it relies solely on existing sensing and actuation capabilities, and does not require adding new communication infrastructure.