 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Grounded Natural Language Understanding through Human-Robot Dialog
Paper and Code
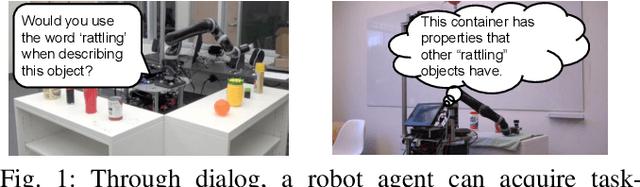
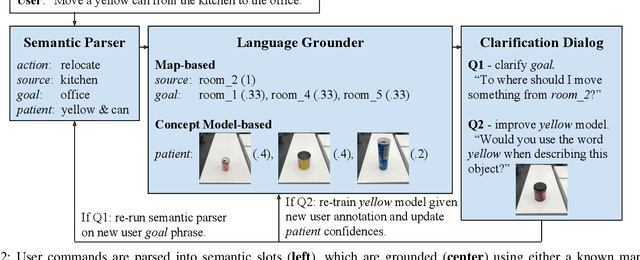
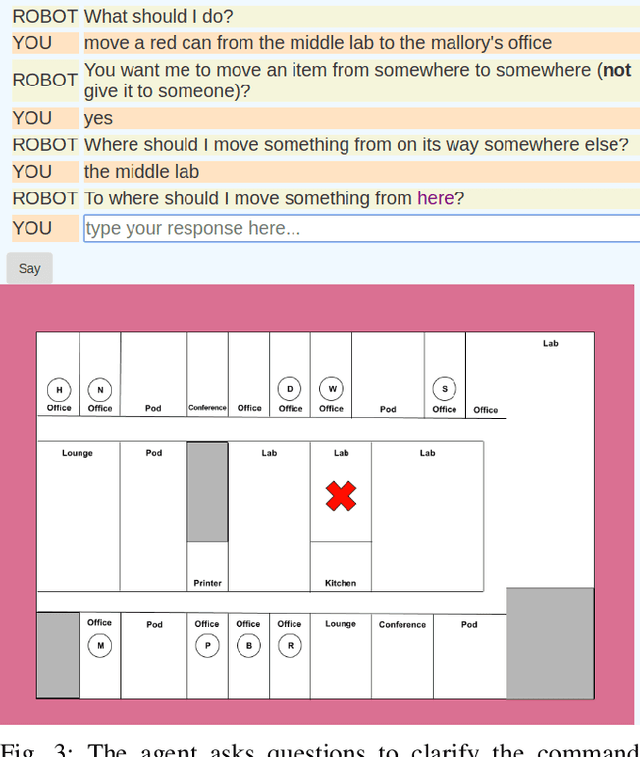
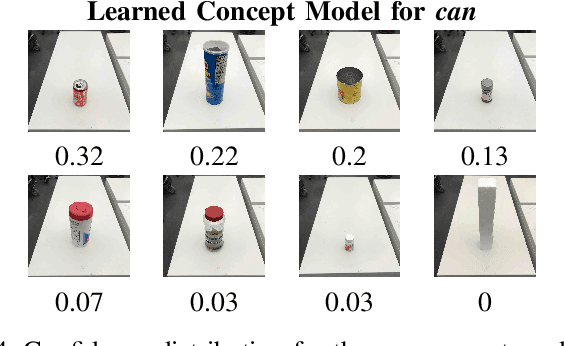
Natural language understanding for robotics can require substantial domain- and platform-specific engineering. For example, for mobile robots to pick-and-place objects in an environment to satisfy human commands, we can specify the language humans use to issue such commands, and connect concept words like red can to physical object properties. One way to alleviate this engineering for a new domain is to enable robots in human environments to adapt dynamically---continually learning new language constructions and perceptual concepts. In this work, we present an end-to-end pipeline for translating natural language commands to discrete robot actions, and use clarification dialogs to jointly improve language parsing and concept grounding. We train and evaluate this agent in a virtual setting on Amazon Mechanical Turk, and we transfer the learned agent to a physical robot platform to demonstrate it in the real world.