 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Large Language Models Help Developers with Robotic Finite State Machine Modification?
Dec 07, 2024Finite state machines (FSMs) are widely used to manage robot behavior logic, particularly in real-world applications that require a high degree of reliability and structure. However, traditional manual FSM design and modification processes can be time-consuming and error-prone. We propose that large language models (LLMs) can assist developers in editing FSM code for real-world robotic use cases. LLMs, with their ability to use context and process natural language, offer a solution for FSM modification with high correctness, allowing developers to update complex control logic through natural language instructions. Our approach leverages few-shot prompting and language-guided code generation to reduce the amount of time it takes to edit an FSM. To validate this approach, we evaluate it on a real-world robotics dataset, demonstrating its effectiveness in practical scenarios.
I Can Tell What I am Doing: Toward Real-World Natural Language Grounding of Robot Experiences
Nov 20, 2024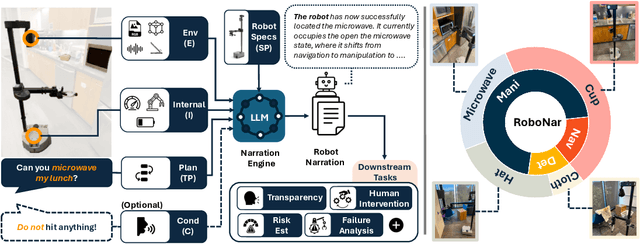
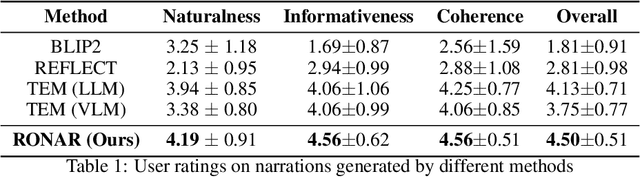
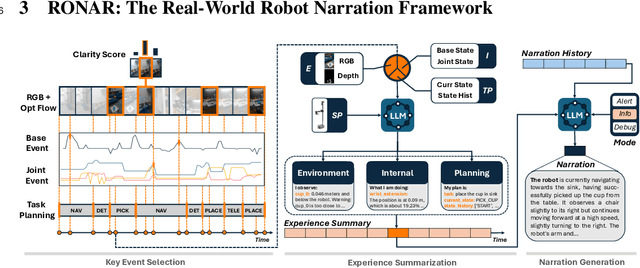
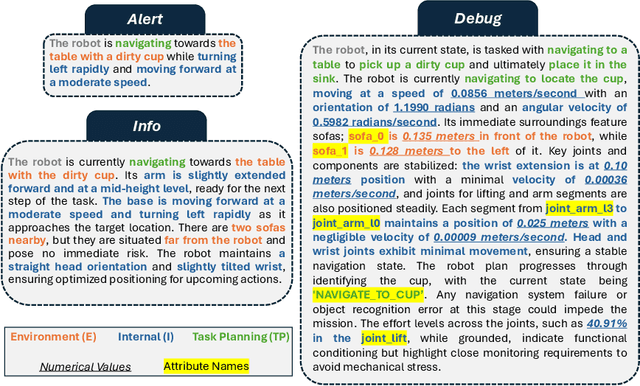
Understanding robot behaviors and experiences through natural language is crucial for developing intelligent and transparent robotic systems. Recent advancement in large language models (LLMs) makes it possible to translate complex, multi-modal robotic experiences into coherent, human-readable narratives. However, grounding real-world robot experiences into natural language is challenging due to many reasons, such as multi-modal nature of data, differing sample rates, and data volume. We introduce RONAR, an LLM-based system that generates natural language narrations from robot experiences, aiding in behavior announcement, failure analysis, and human interaction to recover failure. Evaluated across various scenarios, RONAR outperforms state-of-the-art methods and improves failure recovery efficiency. Our contributions include a multi-modal framework for robot experience narration, a comprehensive real-robot dataset, and empirical evidence of RONAR's effectiveness in enhancing user experience in system transparency and failure analysis.
Fast Explicit-Input Assistance for Teleoperation in Clutter
Feb 04, 2024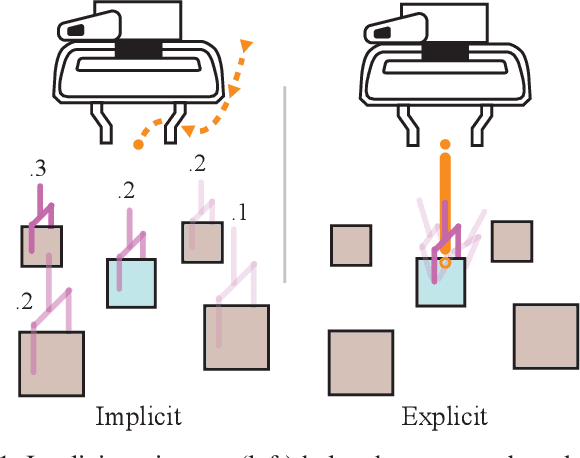
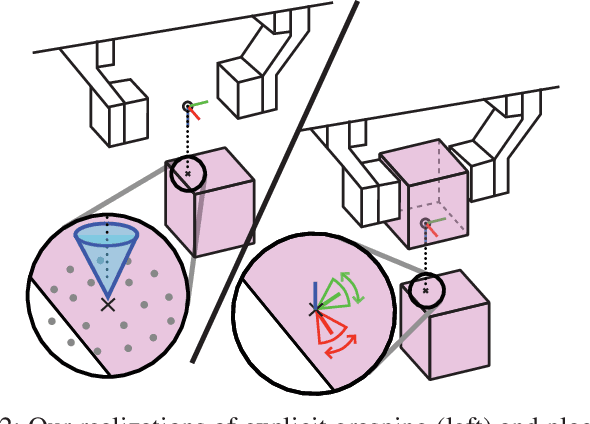
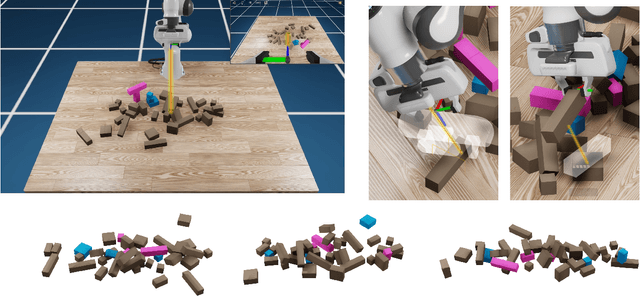
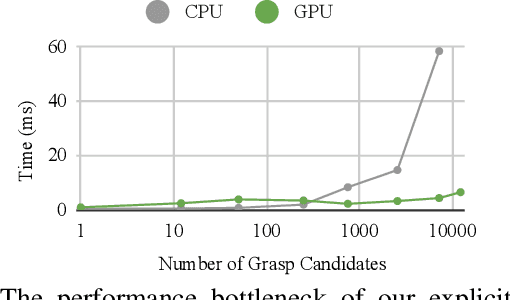
The performance of prediction-based assistance for robot teleoperation degrades in unseen or goal-rich environments due to incorrect or quickly-changing intent inferences. Poor predictions can confuse operators or cause them to change their control input to implicitly signal their goal, resulting in unnatural movement. We present a new assistance algorithm and interface for robotic manipulation where an operator can explicitly communicate a manipulation goal by pointing the end-effector. Rapid optimization and parallel collision checking in a local region around the pointing target enable direct, interactive control over grasp and place pose candidates. We compare the explicit pointing interface to an implicit inference-based assistance scheme in a within-subjects user study (N=20) where participants teleoperate a simulated robot to complete a multi-step singulation and stacking task in cluttered environments. We find that operators prefer the explicit interface, which improved completion time, pick and place success rates, and NASA TLX scores. Our code is available at https://github.com/NVlabs/fast-explicit-teleop
Desiderata for Planning Systems in General-Purpose Service Robots
Jul 04, 2019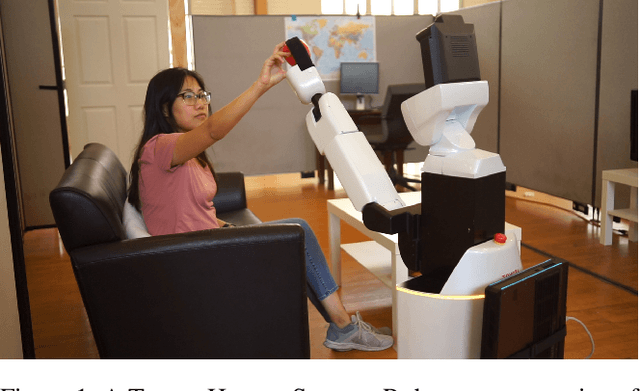
General-purpose service robots are expected to undertake a broad range of tasks at the request of users. Knowledge representation and planning systems are essential to flexible autonomous robots, but the field lacks a unified perspective on which features are essential for general-purpose service robots. Progress towards planning and reasoning for general-purpose service robots is hindered by differing assumptions about users, the environment, and the overall robot system. In this position paper, we propose desiderata for planning and reasoning systems to promote general-purpose service robots. Each proposed item draws on our experience with research on service robots in the office and home and on the demands of these environments. Our desiderata emphasize support for natural human-interfaces as well as for robust fallback methods when interactions with humans and the environment fail. We highlight relevant work towards these goals.
Neural Semantic Parsing with Anonymization for Command Understanding in General-Purpose Service Robots
Jul 02, 2019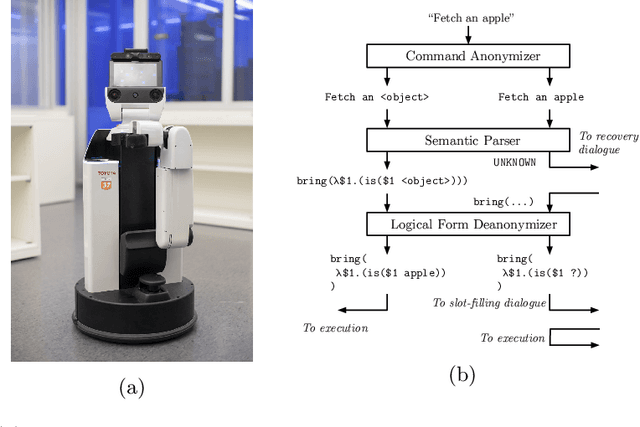
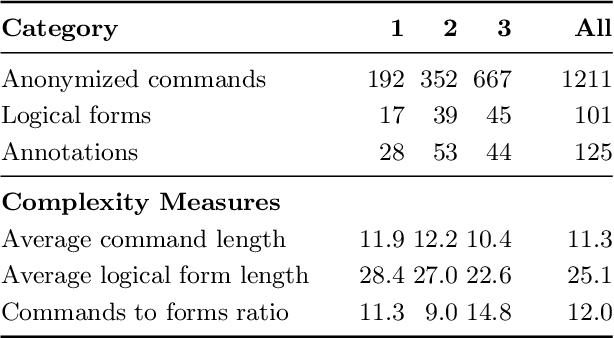
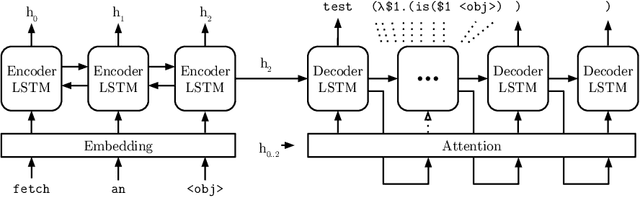
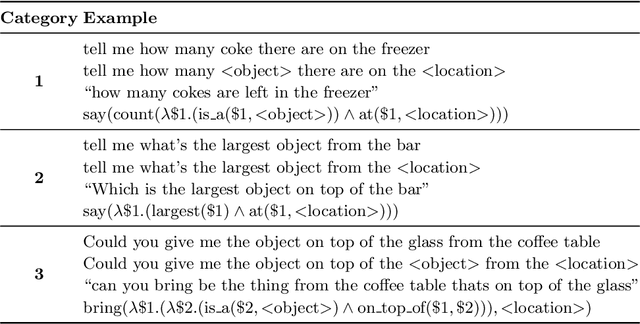
Service robots are envisioned to undertake a wide range of tasks at the request of users. Semantic parsing is one way to convert natural language commands given to these robots into executable representations. Methods for creating semantic parsers, however, rely either on large amounts of data or on engineered lexical features and parsing rules, which has limited their application in robotics. To address this challenge, we propose an approach that leverages neural semantic parsing methods in combination with contextual word embeddings to enable the training of a semantic parser with little data and without domain specific parser engineering. Key to our approach is the use of an anonymized target representation which is more easily learned by the parser. In most cases, this simplified representation can trivially be transformed into an executable format, and in others the parse can be completed through further interaction with the user. We evaluate this approach in the context of the RoboCup@Home General Purpose Service Robot task, where we have collected a corpus of paraphrased versions of commands from the standardized command generator. Our results show that neural semantic parsers can predict the logical form of unseen commands with 89% accuracy. We release our data and the details of our models to encourage further development from the RoboCup and service robotics communities.
Improving Grounded Natural Language Understanding through Human-Robot Dialog
Mar 01, 2019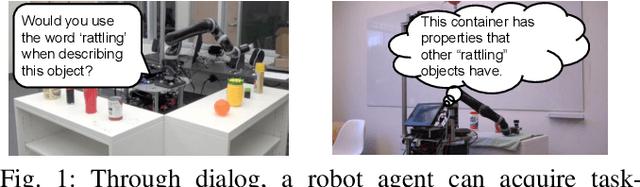
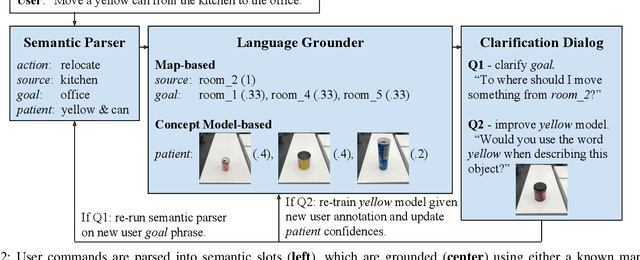
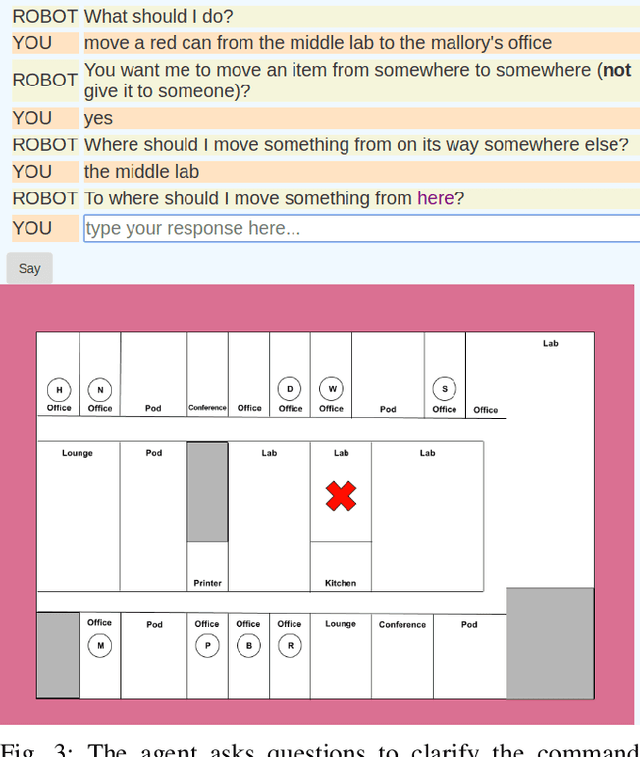
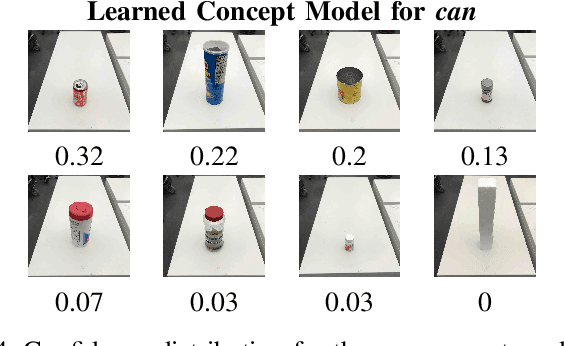
Natural language understanding for robotics can require substantial domain- and platform-specific engineering. For example, for mobile robots to pick-and-place objects in an environment to satisfy human commands, we can specify the language humans use to issue such commands, and connect concept words like red can to physical object properties. One way to alleviate this engineering for a new domain is to enable robots in human environments to adapt dynamically---continually learning new language constructions and perceptual concepts. In this work, we present an end-to-end pipeline for translating natural language commands to discrete robot actions, and use clarification dialogs to jointly improve language parsing and concept grounding. We train and evaluate this agent in a virtual setting on Amazon Mechanical Turk, and we transfer the learned agent to a physical robot platform to demonstrate it in the real world.
LAAIR: A Layered Architecture for Autonomous Interactive Robots
Nov 09, 2018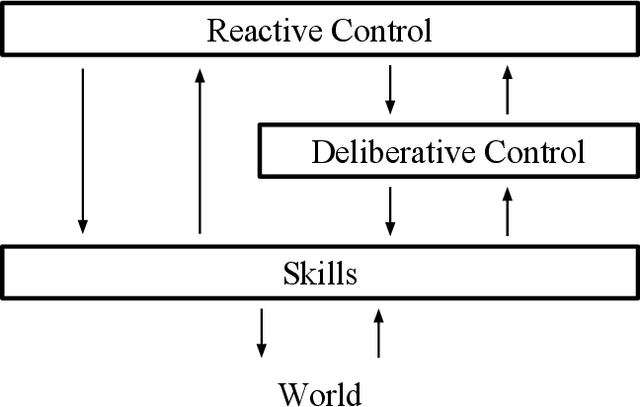
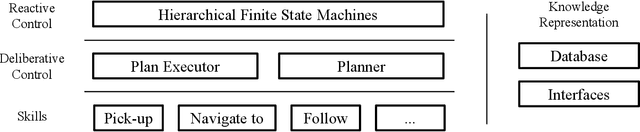
When developing general purpose robots, the overarching software architecture can greatly affect the ease of accomplishing various tasks. Initial efforts to create unified robot systems in the 1990s led to hybrid architectures, emphasizing a hierarchy in which deliberative plans direct the use of reactive skills. However, since that time there has been significant progress in the low-level skills available to robots, including manipulation and perception, making it newly feasible to accomplish many more tasks in real-world domains. There is thus renewed optimism that robots will be able to perform a wide array of tasks while maintaining responsiveness to human operators. However, the top layer in traditional hybrid architectures, designed to achieve long-term goals, can make it difficult to react quickly to human interactions during goal-driven execution. To mitigate this difficulty, we propose a novel architecture that supports such transitions by adding a top-level reactive module which has flexible access to both reactive skills and a deliberative control module. To validate this architecture, we present a case study of its application on a domestic service robot platform.
Interaction and Autonomy in RoboCup@Home and Building-Wide Intelligence
Oct 06, 2018
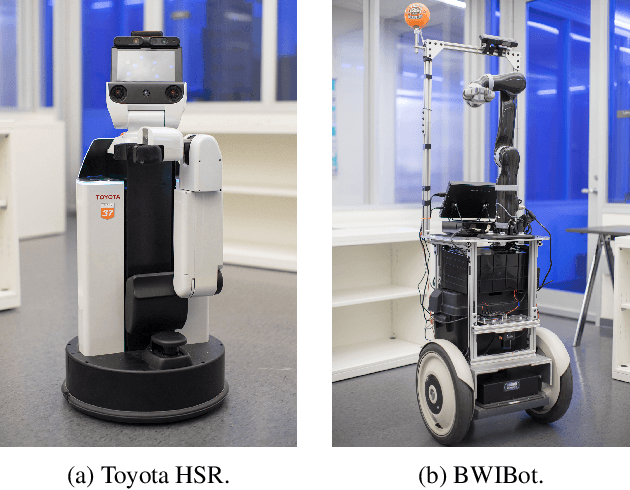
Efforts are underway at UT Austin to build autonomous robot systems that address the challenges of long-term deployments in office environments and of the more prescribed domestic service tasks of the RoboCup@Home competition. We discuss the contrasts and synergies of these efforts, highlighting how our work to build a RoboCup@Home Domestic Standard Platform League entry led us to identify an integrated software architecture that could support both projects. Further, naturalistic deployments of our office robot platform as part of the Building-Wide Intelligence project have led us to identify and research new problems in a traditional laboratory setting.
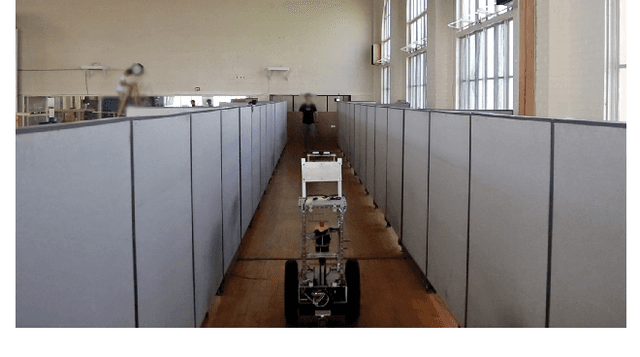
An Architecture for Person-Following using Active Target Search
Sep 24, 2018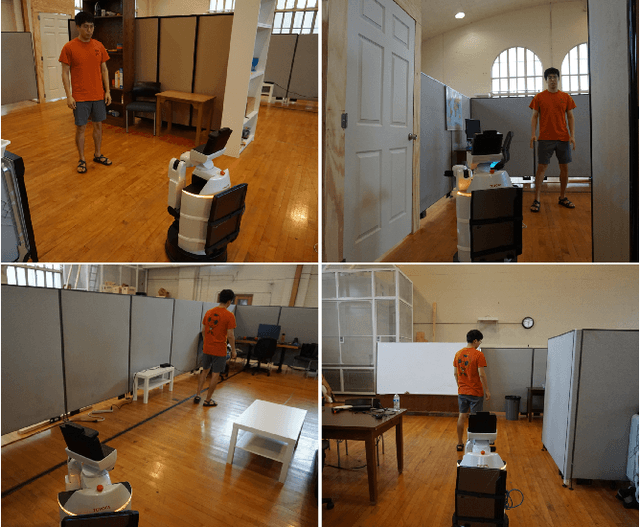
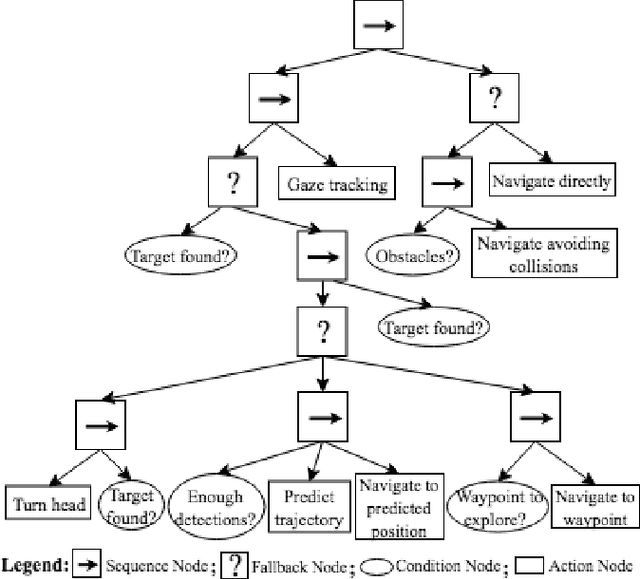
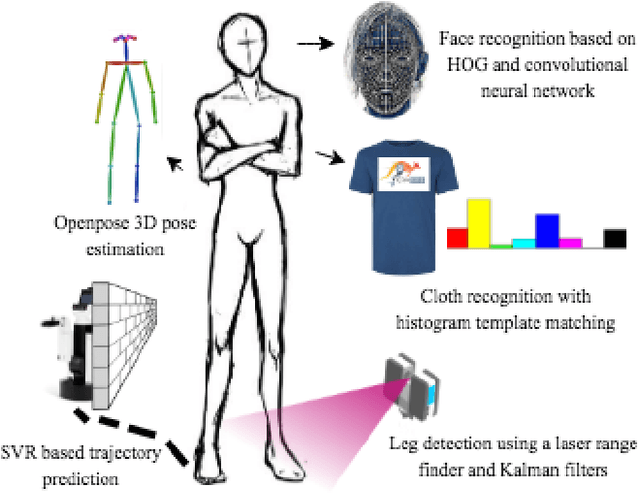
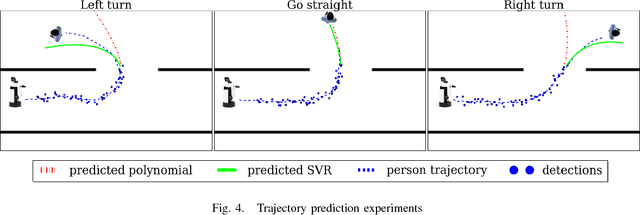
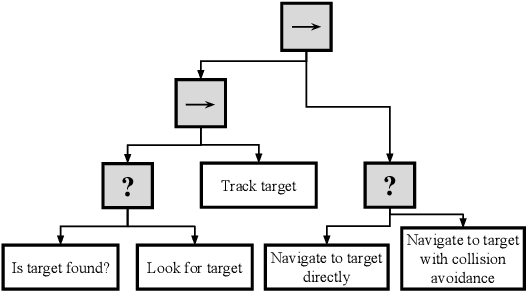
This paper addresses a novel architecture for person-following robots using active search. The proposed system can be applied in real-time to general mobile robots for learning features of a human, detecting and tracking, and finally navigating towards that person. To succeed at person-following, perception, planning, and robot behavior need to be integrated properly. Toward this end, an active target searching capability, including prediction and navigation toward vantage locations for finding human targets, is proposed. The proposed capability aims at improving the robustness and efficiency for tracking and following people under dynamic conditions such as crowded environments. A multi-modal sensor information approach including fusing an RGB-D sensor and a laser scanner, is pursued to robustly track and identify human targets. Bayesian filtering for keeping track of human and a regression algorithm to predict the trajectory of people are investigated. In order to make the robot autonomous, the proposed framework relies on a behavior-tree structure. Using Toyota Human Support Robot (HSR), real-time experiments demonstrate that the proposed architecture can generate fast, efficient person-following behaviors.