 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Semantic Parsing with Anonymization for Command Understanding in General-Purpose Service Robots
Jul 02, 2019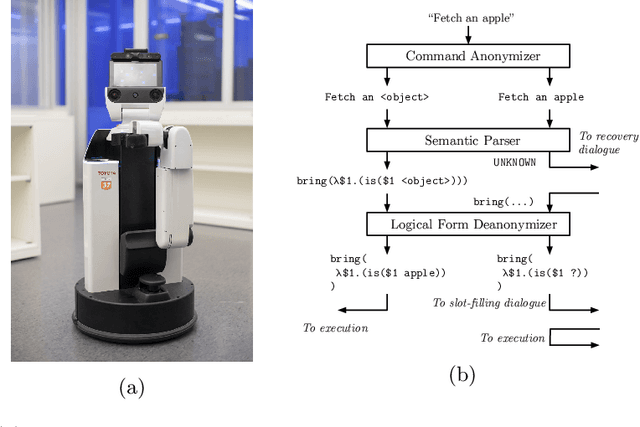
Service robots are envisioned to undertake a wide range of tasks at the request of users. Semantic parsing is one way to convert natural language commands given to these robots into executable representations. Methods for creating semantic parsers, however, rely either on large amounts of data or on engineered lexical features and parsing rules, which has limited their application in robotics. To address this challenge, we propose an approach that leverages neural semantic parsing methods in combination with contextual word embeddings to enable the training of a semantic parser with little data and without domain specific parser engineering. Key to our approach is the use of an anonymized target representation which is more easily learned by the parser. In most cases, this simplified representation can trivially be transformed into an executable format, and in others the parse can be completed through further interaction with the user. We evaluate this approach in the context of the RoboCup@Home General Purpose Service Robot task, where we have collected a corpus of paraphrased versions of commands from the standardized command generator. Our results show that neural semantic parsers can predict the logical form of unseen commands with 89% accuracy. We release our data and the details of our models to encourage further development from the RoboCup and service robotics communities.