 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAAIR: A Layered Architecture for Autonomous Interactive Robots
Nov 09, 2018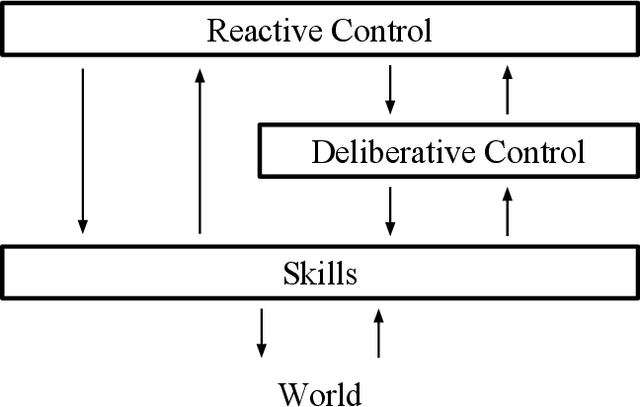
When developing general purpose robots, the overarching software architecture can greatly affect the ease of accomplishing various tasks. Initial efforts to create unified robot systems in the 1990s led to hybrid architectures, emphasizing a hierarchy in which deliberative plans direct the use of reactive skills. However, since that time there has been significant progress in the low-level skills available to robots, including manipulation and perception, making it newly feasible to accomplish many more tasks in real-world domains. There is thus renewed optimism that robots will be able to perform a wide array of tasks while maintaining responsiveness to human operators. However, the top layer in traditional hybrid architectures, designed to achieve long-term goals, can make it difficult to react quickly to human interactions during goal-driven execution. To mitigate this difficulty, we propose a novel architecture that supports such transitions by adding a top-level reactive module which has flexible access to both reactive skills and a deliberative control module. To validate this architecture, we present a case study of its application on a domestic service robot platform.