 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Explicit-Input Assistance for Teleoperation in Clutter
Paper and Code
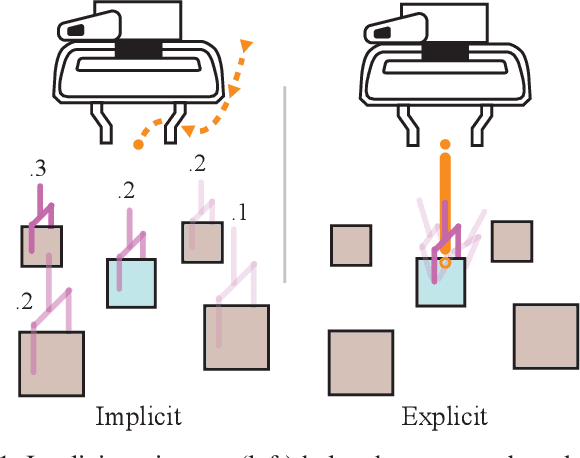
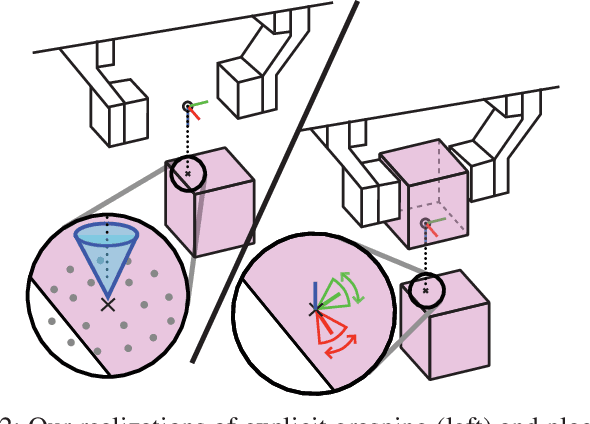
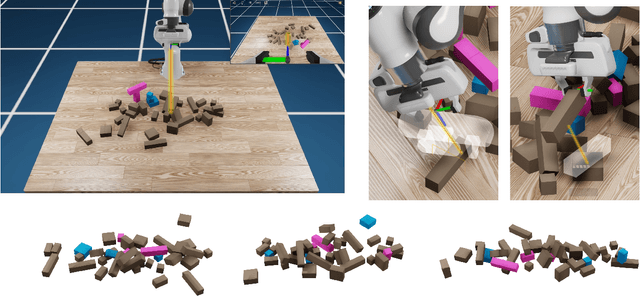
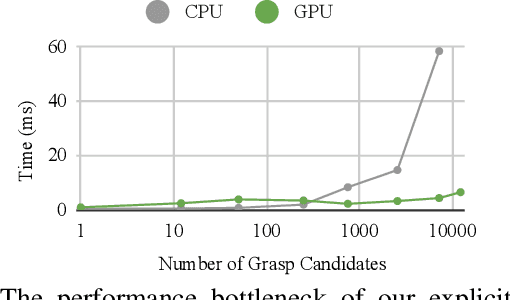
The performance of prediction-based assistance for robot teleoperation degrades in unseen or goal-rich environments due to incorrect or quickly-changing intent inferences. Poor predictions can confuse operators or cause them to change their control input to implicitly signal their goal, resulting in unnatural movement. We present a new assistance algorithm and interface for robotic manipulation where an operator can explicitly communicate a manipulation goal by pointing the end-effector. Rapid optimization and parallel collision checking in a local region around the pointing target enable direct, interactive control over grasp and place pose candidates. We compare the explicit pointing interface to an implicit inference-based assistance scheme in a within-subjects user study (N=20) where participants teleoperate a simulated robot to complete a multi-step singulation and stacking task in cluttered environments. We find that operators prefer the explicit interface, which improved completion time, pick and place success rates, and NASA TLX scores. Our code is available at https://github.com/NVlabs/fast-explicit-teleop