 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRIMER: Perception-Aware Robust Learning-based Multiagent Trajectory Planner
Jun 14, 2024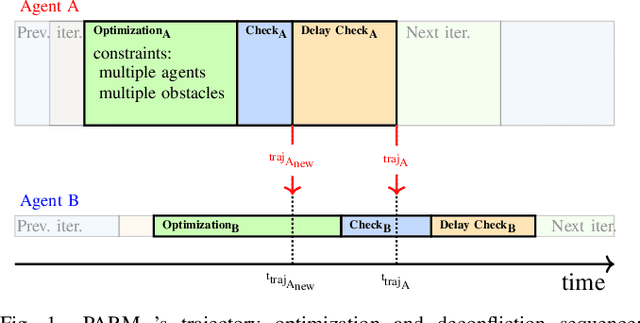
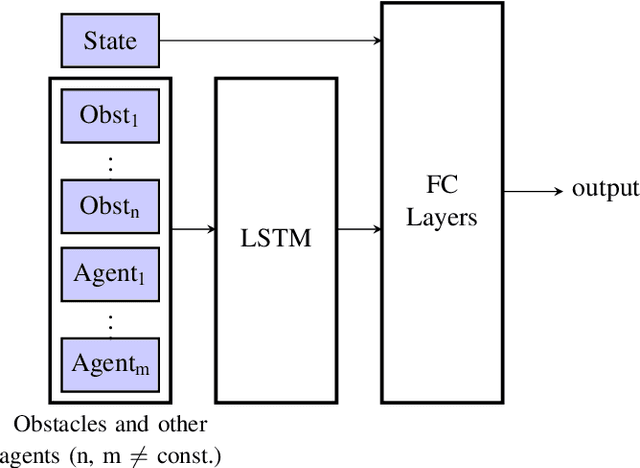
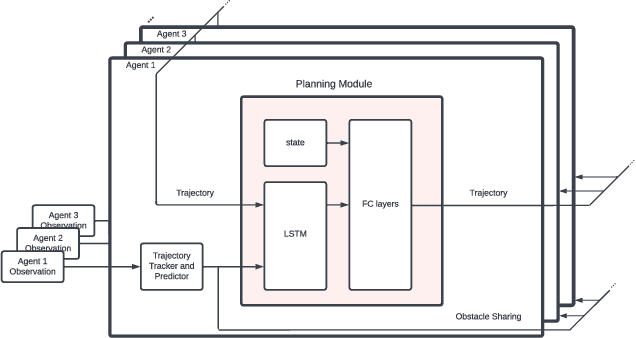

In decentralized multiagent trajectory planners, agents need to communicate and exchange their positions to generate collision-free trajectories. However, due to localization errors/uncertainties, trajectory deconfliction can fail even if trajectories are perfectly shared between agents. To address this issue, we first present PARM and PARM*, perception-aware, decentralized, asynchronous multiagent trajectory planners that enable a team of agents to navigate uncertain environments while deconflicting trajectories and avoiding obstacles using perception information. PARM* differs from PARM as it is less conservative, using more computation to find closer-to-optimal solutions. While these methods achieve state-of-the-art performance, they suffer from high computational costs as they need to solve large optimization problems onboard, making it difficult for agents to replan at high rates. To overcome this challenge, we present our second key contribution, PRIMER, a learning-based planner trained with imitation learning (IL) using PARM* as the expert demonstrator. PRIMER leverages the low computational requirements at deployment of neural networks and achieves a computation speed up to 5500 times faster than optimization-based approaches.
PUMA: Fully Decentralized Uncertainty-aware Multiagent Trajectory Planner with Real-time Image Segmentation-based Frame Alignment
Nov 07, 2023Fully decentralized, multiagent trajectory planners enable complex tasks like search and rescue or package delivery by ensuring safe navigation in unknown environments. However, deconflicting trajectories with other agents and ensuring collision-free paths in a fully decentralized setting is complicated by dynamic elements and localization uncertainty. To this end, this paper presents (1) an uncertainty-aware multiagent trajectory planner and (2) an image segmentation-based frame alignment pipeline. The uncertainty-aware planner propagates uncertainty associated with the future motion of detected obstacles, and by incorporating this propagated uncertainty into optimization constraints, the planner effectively navigates around obstacles. Unlike conventional methods that emphasize explicit obstacle tracking, our approach integrates implicit tracking. Sharing trajectories between agents can cause potential collisions due to frame misalignment. Addressing this, we introduce a novel frame alignment pipeline that rectifies inter-agent frame misalignment. This method leverages a zero-shot image segmentation model for detecting objects in the environment and a data association framework based on geometric consistency for map alignment. Our approach accurately aligns frames with only 0.18 m and 2.7 deg of mean frame alignment error in our most challenging simulation scenario. In addition, we conducted hardware experiments and successfully achieved 0.29 m and 2.59 deg of frame alignment error. Together with the alignment framework, our planner ensures safe navigation in unknown environments and collision avoidance in decentralized settings.
REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial Robots
Nov 02, 2023


Large Language Models (LLMs) pre-trained on internet-scale datasets have shown impressive capabilities in code understanding, synthesis, and general purpose question-and-answering. Key to their performance is the substantial prior knowledge acquired during training and their ability to reason over extended sequences of symbols, often presented in natural language. In this work, we aim to harness the extensive long-term reasoning, natural language comprehension, and the available prior knowledge of LLMs for increased resilience and adaptation in autonomous mobile robots. We introduce REAL, an approach for REsilience and Adaptation using LLMs. REAL provides a strategy to employ LLMs as a part of the mission planning and control framework of an autonomous robot. The LLM employed by REAL provides (i) a source of prior knowledge to increase resilience for challenging scenarios that the system had not been explicitly designed for; (ii) a way to interpret natural-language and other log/diagnostic information available in the autonomy stack, for mission planning; (iii) a way to adapt the control inputs using minimal user-provided prior knowledge about the dynamics/kinematics of the robot. We integrate REAL in the autonomy stack of a real multirotor, querying onboard an offboard LLM at 0.1-1.0 Hz as part the robot's mission planning and control feedback loops. We demonstrate in real-world experiments the ability of the LLM to reduce the position tracking errors of a multirotor under the presence of (i) errors in the parameters of the controller and (ii) unmodeled dynamics. We also show (iii) decision making to avoid potentially dangerous scenarios (e.g., robot oscillates) that had not been explicitly accounted for in the initial prompt design.