 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSANDO: Safe Autonomous Trajectory Planning for Dynamic Unknown Environments
Apr 08, 2026SANDO is a safe trajectory planner for 3D dynamic unknown environments, where obstacle locations and motions are unknown a priori and a collision-free plan can become unsafe at any moment, requiring fast replanning. Existing soft-constraint planners are fast but cannot guarantee collision-free paths, while hard-constraint methods ensure safety at the cost of longer computation. SANDO addresses this trade-off through three contributions. First, a heat map-based A* global planner steers paths away from high-risk regions using soft costs, and a spatiotemporal safe flight corridor (STSFC) generator produces time-layered polytopes that inflate obstacles only by their worst-case reachable set at each time layer, rather than by the worst case over the entire horizon. Second, trajectory optimization is formulated as a Mixed-Integer Quadratic Program (MIQP) with hard collision-avoidance constraints, and a variable elimination technique reduces the number of decision variables, enabling fast computation. Third, a formal safety analysis establishes collision-free guarantees under explicit velocity-bound and estimation-error assumptions. Ablation studies show that variable elimination yields up to 7.4x speedup in optimization time, and that STSFCs are critical for feasibility in dense dynamic environments. Benchmark simulations against state-of-the-art methods across standardized static benchmarks, obstacle-rich static forests, and dynamic environments show that SANDO consistently achieves the highest success rate with no constraint violations across all difficulty levels; perception-only experiments without ground truth obstacle information confirm robust performance under realistic sensing. Hardware experiments on a UAV with fully onboard planning, perception, and localization demonstrate six safe flights in static environments and ten safe flights among dynamic obstacles.
Robust Dynamic Object Detection in Cluttered Indoor Scenes via Learned Spatiotemporal Cues
Mar 16, 2026Reliable dynamic object detection in cluttered environments remains a critical challenge for autonomous navigation. Purely geometric LiDAR pipelines that rely on clustering and heuristic filtering can miss dynamic obstacles when they move in close proximity to static structure or are only partially observed. Vision-augmented approaches can provide additional semantic cues, but are often limited by closed-set detectors and camera field-of-view constraints, reducing robustness to novel obstacles and out-of-frustum events. In this work, we present a LiDAR-only framework that fuses temporal occupancy-grid-based motion segmentation with a learned bird's-eye-view (BEV) dynamic prior. A fusion module prioritizes 3D detections when available, while using the learned dynamic grid to recover detections that would otherwise be lost due to proximity-induced false negatives. Experiments with motion-capture ground truth show our method achieves 28.67% higher recall and 18.50% higher F1 score than the state-of-the-art in substantially cluttered environments while maintaining comparable precision and position error.
MIGHTY: Hermite Spline-based Efficient Trajectory Planning
Nov 13, 2025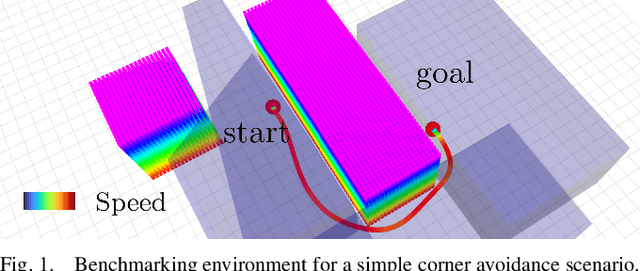
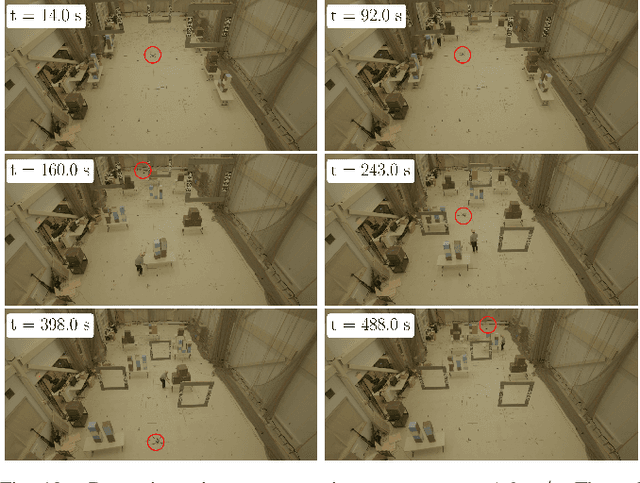
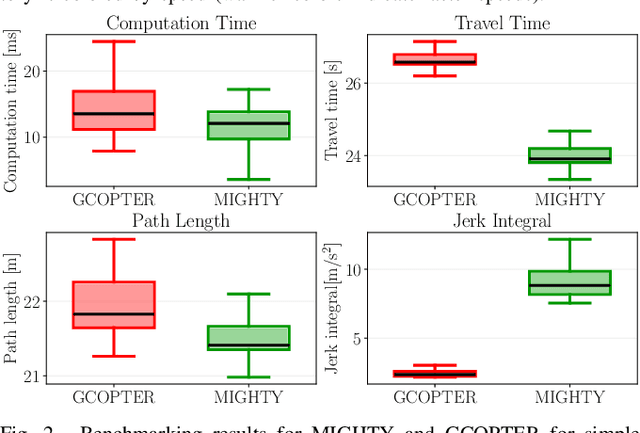
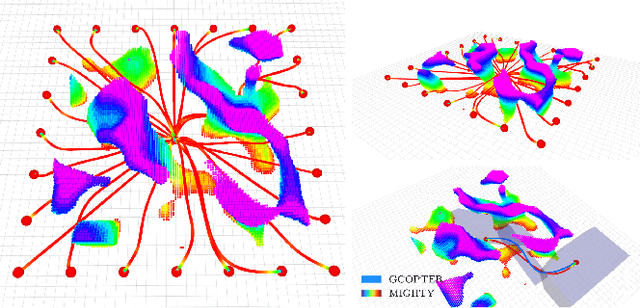
Hard-constraint trajectory planners often rely on commercial solvers and demand substantial computational resources. Existing soft-constraint methods achieve faster computation, but either (1) decouple spatial and temporal optimization or (2) restrict the search space. To overcome these limitations, we introduce MIGHTY, a Hermite spline-based planner that performs spatiotemporal optimization while fully leveraging the continuous search space of a spline. In simulation, MIGHTY achieves a 9.3% reduction in computation time and a 13.1% reduction in travel time over state-of-the-art baselines, with a 100% success rate. In hardware, MIGHTY completes multiple high-speed flights up to 6.7 m/s in a cluttered static environment and long-duration flights with dynamically added obstacles.
DYNUS: Uncertainty-aware Trajectory Planner in Dynamic Unknown Environments
Apr 24, 2025

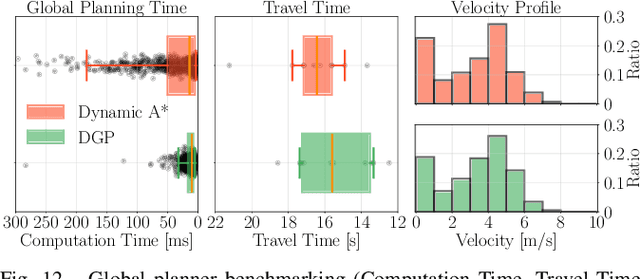

This paper introduces DYNUS, an uncertainty-aware trajectory planner designed for dynamic unknown environments. Operating in such settings presents many challenges -- most notably, because the agent cannot predict the ground-truth future paths of obstacles, a previously planned trajectory can become unsafe at any moment, requiring rapid replanning to avoid collisions. Recently developed planners have used soft-constraint approaches to achieve the necessary fast computation times; however, these methods do not guarantee collision-free paths even with static obstacles. In contrast, hard-constraint methods ensure collision-free safety, but typically have longer computation times. To address these issues, we propose three key contributions. First, the DYNUS Global Planner (DGP) and Temporal Safe Corridor Generation operate in spatio-temporal space and handle both static and dynamic obstacles in the 3D environment. Second, the Safe Planning Framework leverages a combination of exploratory, safe, and contingency trajectories to flexibly re-route when potential future collisions with dynamic obstacles are detected. Finally, the Fast Hard-Constraint Local Trajectory Formulation uses a variable elimination approach to reduce the problem size and enable faster computation by pre-computing dependencies between free and dependent variables while still ensuring collision-free trajectories. We evaluated DYNUS in a variety of simulations, including dense forests, confined office spaces, cave systems, and dynamic environments. Our experiments show that DYNUS achieves a success rate of 100% and travel times that are approximately 25.0% faster than state-of-the-art methods. We also evaluated DYNUS on multiple platforms -- a quadrotor, a wheeled robot, and a quadruped -- in both simulation and hardware experiments.
PRIMER: Perception-Aware Robust Learning-based Multiagent Trajectory Planner
Jun 14, 2024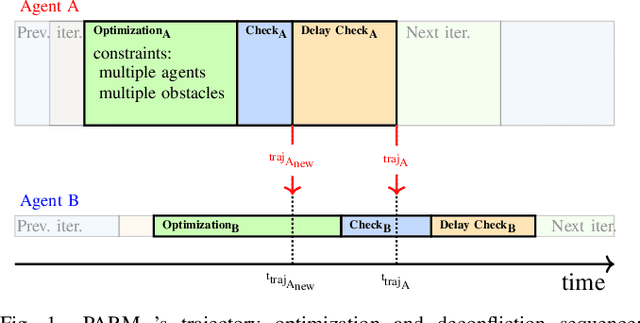
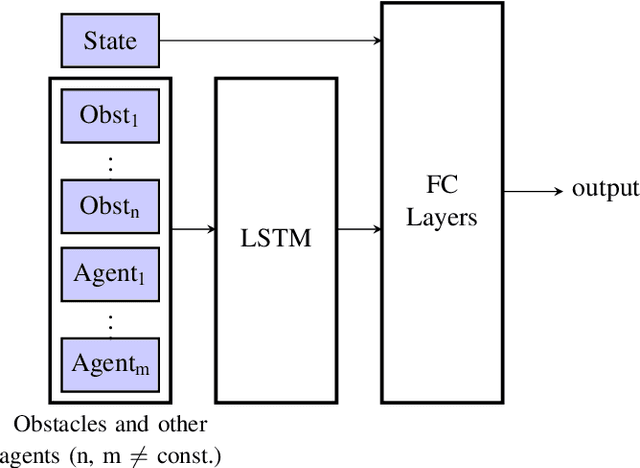
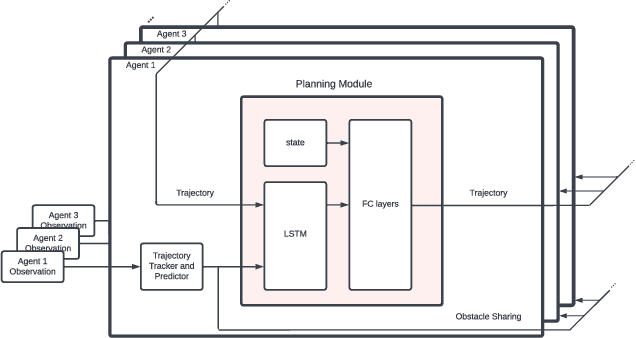

In decentralized multiagent trajectory planners, agents need to communicate and exchange their positions to generate collision-free trajectories. However, due to localization errors/uncertainties, trajectory deconfliction can fail even if trajectories are perfectly shared between agents. To address this issue, we first present PARM and PARM*, perception-aware, decentralized, asynchronous multiagent trajectory planners that enable a team of agents to navigate uncertain environments while deconflicting trajectories and avoiding obstacles using perception information. PARM* differs from PARM as it is less conservative, using more computation to find closer-to-optimal solutions. While these methods achieve state-of-the-art performance, they suffer from high computational costs as they need to solve large optimization problems onboard, making it difficult for agents to replan at high rates. To overcome this challenge, we present our second key contribution, PRIMER, a learning-based planner trained with imitation learning (IL) using PARM* as the expert demonstrator. PRIMER leverages the low computational requirements at deployment of neural networks and achieves a computation speed up to 5500 times faster than optimization-based approaches.
CGD: Constraint-Guided Diffusion Policies for UAV Trajectory Planning
May 02, 2024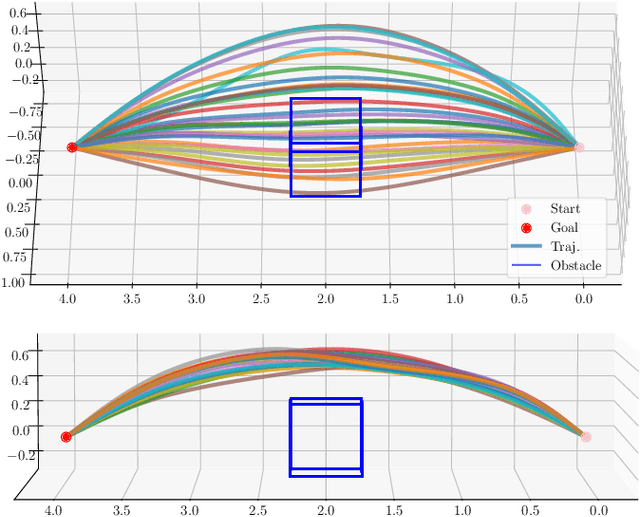
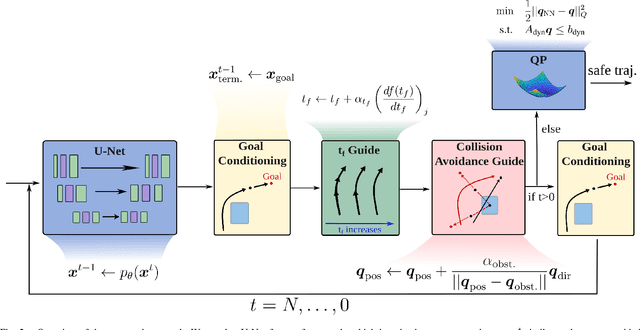
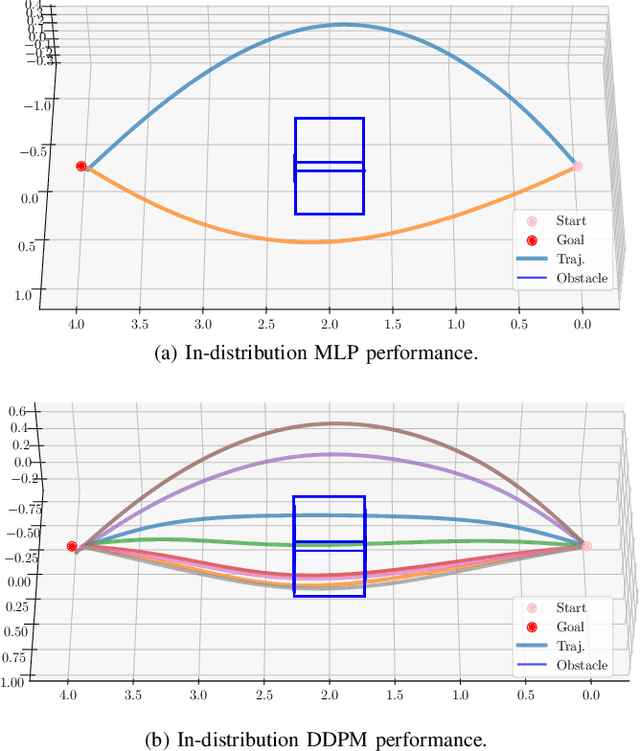
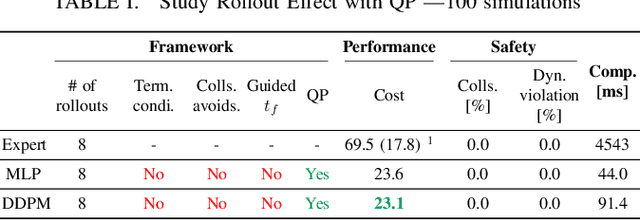
Traditional optimization-based planners, while effective, suffer from high computational costs, resulting in slow trajectory generation. A successful strategy to reduce computation time involves using Imitation Learning (IL) to develop fast neural network (NN) policies from those planners, which are treated as expert demonstrators. Although the resulting NN policies are effective at quickly generating trajectories similar to those from the expert, (1) their output does not explicitly account for dynamic feasibility, and (2) the policies do not accommodate changes in the constraints different from those used during training. To overcome these limitations, we propose Constraint-Guided Diffusion (CGD), a novel IL-based approach to trajectory planning. CGD leverages a hybrid learning/online optimization scheme that combines diffusion policies with a surrogate efficient optimization problem, enabling the generation of collision-free, dynamically feasible trajectories. The key ideas of CGD include dividing the original challenging optimization problem solved by the expert into two more manageable sub-problems: (a) efficiently finding collision-free paths, and (b) determining a dynamically-feasible time-parametrization for those paths to obtain a trajectory. Compared to conventional neural network architectures, we demonstrate through numerical evaluations significant improvements in performance and dynamic feasibility under scenarios with new constraints never encountered during training.
SOS-SLAM: Segmentation for Open-Set SLAM in Unstructured Environments
Jan 09, 2024



We present a novel framework for open-set Simultaneous Localization and Mapping (SLAM) in unstructured environments that uses segmentation to create a map of objects and geometric relationships between objects for localization. Our system consists of 1) a front-end mapping pipeline using a zero-shot segmentation model to extract object masks from images and track them across frames to generate an object-based map and 2) a frame alignment pipeline that uses the geometric consistency of objects to efficiently localize within maps taken in a variety of conditions. This approach is shown to be more robust to changes in lighting and appearance than traditional feature-based SLAM systems or global descriptor methods. This is established by evaluating SOS-SLAM on the Batvik seasonal dataset which includes drone flights collected over a coastal plot of southern Finland during different seasons and lighting conditions. Across flights during varying environmental conditions, our approach achieves higher recall than benchmark methods with precision of 1.0. SOS-SLAM localizes within a reference map up to 14x faster than other feature based approaches and has a map size less than 0.4% the size of the most compact other maps. When considering localization performance from varying viewpoints, our approach outperforms all benchmarks from the same viewpoint and most benchmarks from different viewpoints. SOS-SLAM is a promising new approach for SLAM in unstructured environments that is robust to changes in lighting and appearance and is more computationally efficient than other approaches. We release our code and datasets: https://acl.mit.edu/SOS-SLAM/.
PUMA: Fully Decentralized Uncertainty-aware Multiagent Trajectory Planner with Real-time Image Segmentation-based Frame Alignment
Nov 07, 2023Fully decentralized, multiagent trajectory planners enable complex tasks like search and rescue or package delivery by ensuring safe navigation in unknown environments. However, deconflicting trajectories with other agents and ensuring collision-free paths in a fully decentralized setting is complicated by dynamic elements and localization uncertainty. To this end, this paper presents (1) an uncertainty-aware multiagent trajectory planner and (2) an image segmentation-based frame alignment pipeline. The uncertainty-aware planner propagates uncertainty associated with the future motion of detected obstacles, and by incorporating this propagated uncertainty into optimization constraints, the planner effectively navigates around obstacles. Unlike conventional methods that emphasize explicit obstacle tracking, our approach integrates implicit tracking. Sharing trajectories between agents can cause potential collisions due to frame misalignment. Addressing this, we introduce a novel frame alignment pipeline that rectifies inter-agent frame misalignment. This method leverages a zero-shot image segmentation model for detecting objects in the environment and a data association framework based on geometric consistency for map alignment. Our approach accurately aligns frames with only 0.18 m and 2.7 deg of mean frame alignment error in our most challenging simulation scenario. In addition, we conducted hardware experiments and successfully achieved 0.29 m and 2.59 deg of frame alignment error. Together with the alignment framework, our planner ensures safe navigation in unknown environments and collision avoidance in decentralized settings.
REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial Robots
Nov 02, 2023


Large Language Models (LLMs) pre-trained on internet-scale datasets have shown impressive capabilities in code understanding, synthesis, and general purpose question-and-answering. Key to their performance is the substantial prior knowledge acquired during training and their ability to reason over extended sequences of symbols, often presented in natural language. In this work, we aim to harness the extensive long-term reasoning, natural language comprehension, and the available prior knowledge of LLMs for increased resilience and adaptation in autonomous mobile robots. We introduce REAL, an approach for REsilience and Adaptation using LLMs. REAL provides a strategy to employ LLMs as a part of the mission planning and control framework of an autonomous robot. The LLM employed by REAL provides (i) a source of prior knowledge to increase resilience for challenging scenarios that the system had not been explicitly designed for; (ii) a way to interpret natural-language and other log/diagnostic information available in the autonomy stack, for mission planning; (iii) a way to adapt the control inputs using minimal user-provided prior knowledge about the dynamics/kinematics of the robot. We integrate REAL in the autonomy stack of a real multirotor, querying onboard an offboard LLM at 0.1-1.0 Hz as part the robot's mission planning and control feedback loops. We demonstrate in real-world experiments the ability of the LLM to reduce the position tracking errors of a multirotor under the presence of (i) errors in the parameters of the controller and (ii) unmodeled dynamics. We also show (iii) decision making to avoid potentially dangerous scenarios (e.g., robot oscillates) that had not been explicitly accounted for in the initial prompt design.
Robust MADER: Decentralized Multiagent Trajectory Planner Robust to Communication Delay in Dynamic Environments
Mar 10, 2023
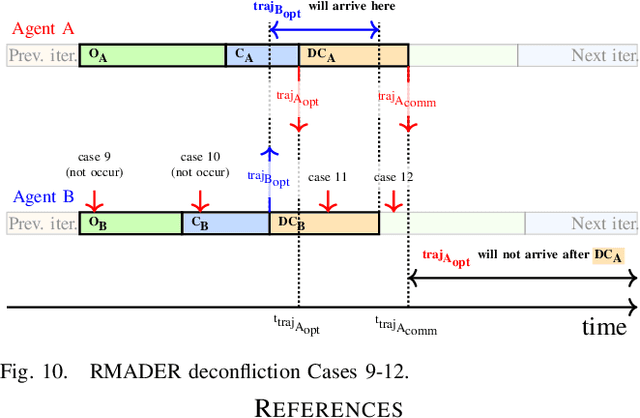
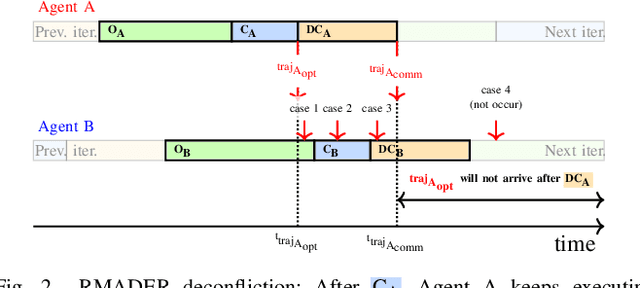

Communication delays can be catastrophic for multiagent systems. However, most existing state-of-the-art multiagent trajectory planners assume perfect communication and therefore lack a strategy to rectify this issue in real-world environments. To address this challenge, we propose Robust MADER (RMADER), a decentralized, asynchronous multiagent trajectory planner robust to communication delay. By always keeping a guaranteed collision-free trajectory and performing a delay check step, RMADER is able to guarantee safety even under communication delay. We perform an in-depth analysis of trajectory deconfliction among agents, extensive benchmark studies, and hardware flight experiments with multiple dynamic obstacles. We show that RMADER outperforms existing approaches by achieving a 100% success rate of collision-free trajectory generation, whereas the next best asynchronous decentralized method only achieves 83% success.