 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust MADER: Decentralized Multiagent Trajectory Planner Robust to Communication Delay in Dynamic Environments
Paper and Code

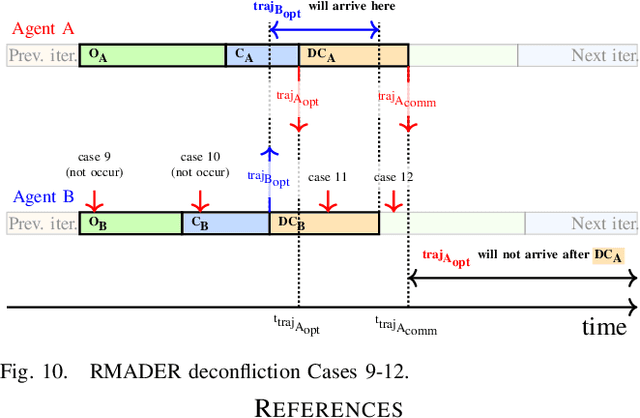
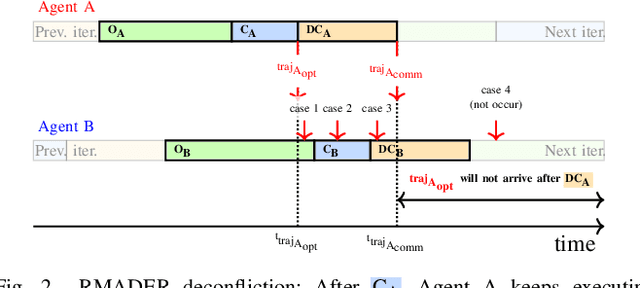

Communication delays can be catastrophic for multiagent systems. However, most existing state-of-the-art multiagent trajectory planners assume perfect communication and therefore lack a strategy to rectify this issue in real-world environments. To address this challenge, we propose Robust MADER (RMADER), a decentralized, asynchronous multiagent trajectory planner robust to communication delay. By always keeping a guaranteed collision-free trajectory and performing a delay check step, RMADER is able to guarantee safety even under communication delay. We perform an in-depth analysis of trajectory deconfliction among agents, extensive benchmark studies, and hardware flight experiments with multiple dynamic obstacles. We show that RMADER outperforms existing approaches by achieving a 100% success rate of collision-free trajectory generation, whereas the next best asynchronous decentralized method only achieves 83% success.