 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDYNUS: Uncertainty-aware Trajectory Planner in Dynamic Unknown Environments
Apr 24, 2025

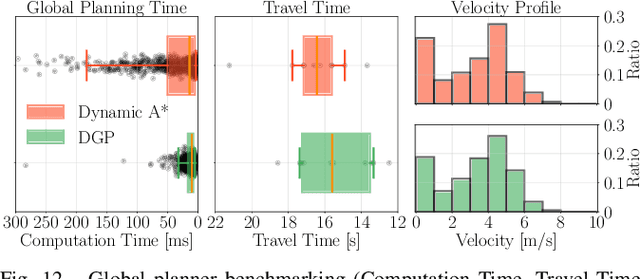

This paper introduces DYNUS, an uncertainty-aware trajectory planner designed for dynamic unknown environments. Operating in such settings presents many challenges -- most notably, because the agent cannot predict the ground-truth future paths of obstacles, a previously planned trajectory can become unsafe at any moment, requiring rapid replanning to avoid collisions. Recently developed planners have used soft-constraint approaches to achieve the necessary fast computation times; however, these methods do not guarantee collision-free paths even with static obstacles. In contrast, hard-constraint methods ensure collision-free safety, but typically have longer computation times. To address these issues, we propose three key contributions. First, the DYNUS Global Planner (DGP) and Temporal Safe Corridor Generation operate in spatio-temporal space and handle both static and dynamic obstacles in the 3D environment. Second, the Safe Planning Framework leverages a combination of exploratory, safe, and contingency trajectories to flexibly re-route when potential future collisions with dynamic obstacles are detected. Finally, the Fast Hard-Constraint Local Trajectory Formulation uses a variable elimination approach to reduce the problem size and enable faster computation by pre-computing dependencies between free and dependent variables while still ensuring collision-free trajectories. We evaluated DYNUS in a variety of simulations, including dense forests, confined office spaces, cave systems, and dynamic environments. Our experiments show that DYNUS achieves a success rate of 100% and travel times that are approximately 25.0% faster than state-of-the-art methods. We also evaluated DYNUS on multiple platforms -- a quadrotor, a wheeled robot, and a quadruped -- in both simulation and hardware experiments.
Deep Reinforcement Learning for Local Path Following of an Autonomous Formula SAE Vehicle
Jan 05, 2024
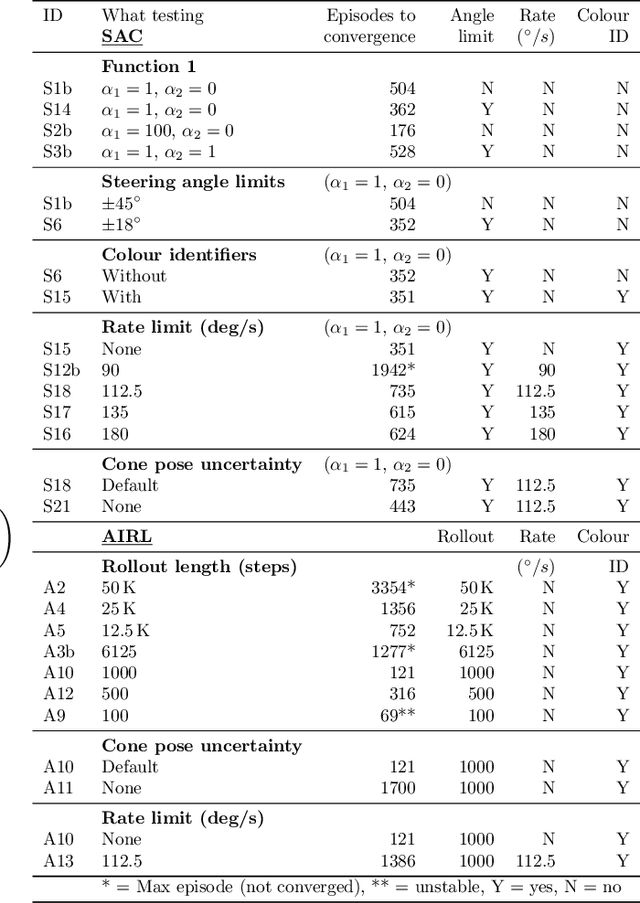
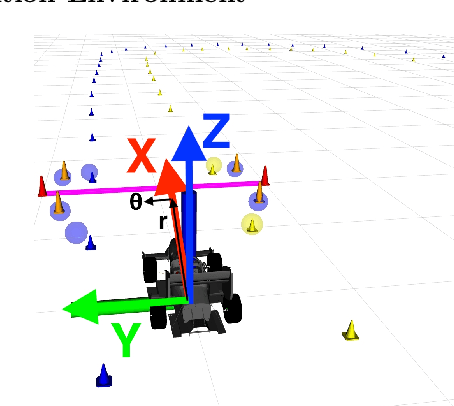
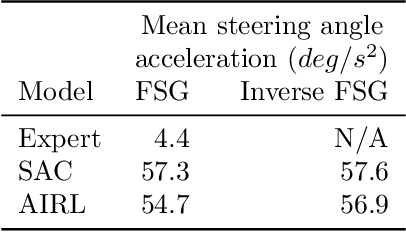
With the continued introduction of driverless events to Formula:Society of Automotive Engineers (F:SAE) competitions around the world, teams are investigating all aspects of the autonomous vehicle stack. This paper presents the use of Deep Reinforcement Learning (DRL) and Inverse Reinforcement Learning (IRL) to map locally-observed cone positions to a desired steering angle for race track following. Two state-of-the-art algorithms not previously tested in this context: soft actor critic (SAC) and adversarial inverse reinforcement learning (AIRL), are used to train models in a representative simulation. Three novel reward functions for use by RL algorithms in an autonomous racing context are also discussed. Tests performed in simulation and the real world suggest that both algorithms can successfully train models for local path following. Suggestions for future work are presented to allow these models to scale to a full F:SAE vehicle.