 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOS-SLAM: Segmentation for Open-Set SLAM in Unstructured Environments
Jan 09, 2024



We present a novel framework for open-set Simultaneous Localization and Mapping (SLAM) in unstructured environments that uses segmentation to create a map of objects and geometric relationships between objects for localization. Our system consists of 1) a front-end mapping pipeline using a zero-shot segmentation model to extract object masks from images and track them across frames to generate an object-based map and 2) a frame alignment pipeline that uses the geometric consistency of objects to efficiently localize within maps taken in a variety of conditions. This approach is shown to be more robust to changes in lighting and appearance than traditional feature-based SLAM systems or global descriptor methods. This is established by evaluating SOS-SLAM on the Batvik seasonal dataset which includes drone flights collected over a coastal plot of southern Finland during different seasons and lighting conditions. Across flights during varying environmental conditions, our approach achieves higher recall than benchmark methods with precision of 1.0. SOS-SLAM localizes within a reference map up to 14x faster than other feature based approaches and has a map size less than 0.4% the size of the most compact other maps. When considering localization performance from varying viewpoints, our approach outperforms all benchmarks from the same viewpoint and most benchmarks from different viewpoints. SOS-SLAM is a promising new approach for SLAM in unstructured environments that is robust to changes in lighting and appearance and is more computationally efficient than other approaches. We release our code and datasets: https://acl.mit.edu/SOS-SLAM/.
CLEAR: A Consistent Lifting, Embedding, and Alignment Rectification Algorithm for Multi-Agent Data Association
Feb 06, 2019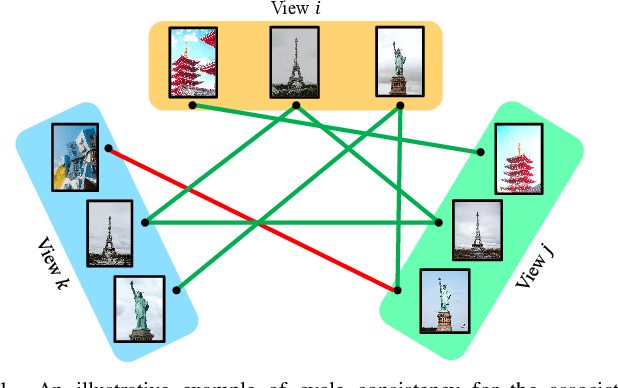
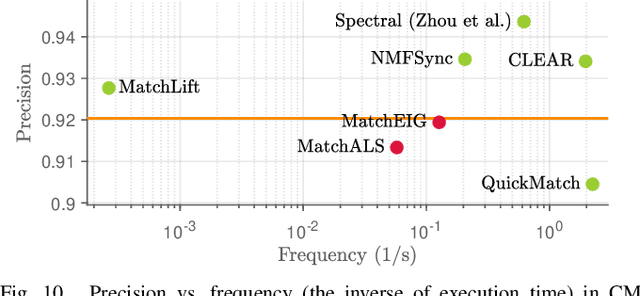
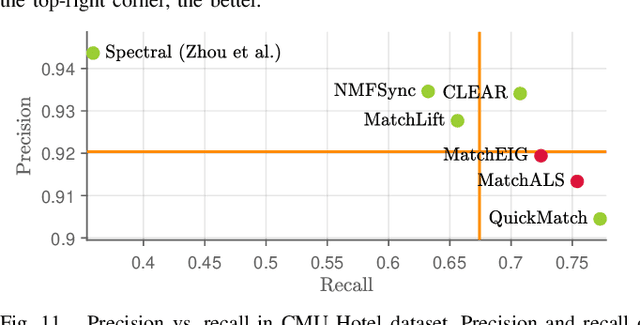
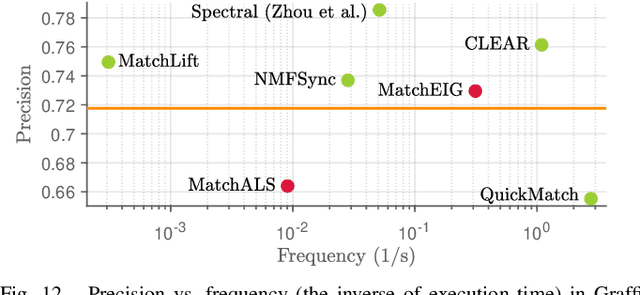
A fundamental challenge in many robotics applications is to correctly synchronize and fuse observations across a team of sensors or agents. Instead of solely relying on pairwise matches among observations, multi-way matching methods leverage the notion of cycle consistency to (i) provide a natural correction mechanism for removing noise and outliers from pairwise matches; (ii) construct an efficient and low-rank representation of the data via merging the redundant observations. To solve this computationally challenging problem, state-of-the-art techniques resort to relaxation and rounding techniques that can potentially result in a solution that violates the cycle consistency principle. Hence, losing the aforementioned benefits. In this work, we present the CLEAR algorithm to address this issue by generating solutions that are, by construction, cycle consistent. Through a novel spectral graph clustering approach, CLEAR fuses the techniques in the multi-way matching and the spectral clustering literature and provides consistent solutions, even in challenging high-noise regimes. Our resulting general framework can provide significant improvement in the accuracy and efficiency of existing distributed multi-agent learning, collaborative SLAM, and multiobject tracking pipelines, which traditionally use pairwise (but potentially inconsistent) correspondences.