 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAmorphous Fortress Online: Collaboratively Designing Open-Ended Multi-Agent AI and Game Environments
Feb 08, 2025



This work introduces Amorphous Fortress Online -- a web-based platform where users can design petri-dish-like environments and games consisting of multi-agent AI characters. Users can play, create, and share artificial life and game environments made up of microscopic but transparent finite-state machine agents that interact with each other. The website features multiple interactive editors and accessible settings to view the multi-agent interactions directly from the browser. This system serves to provide a database of thematically diverse AI and game environments that use the emergent behaviors of simple AI agents.
Safe Autonomy for Uncrewed Surface Vehicles Using Adaptive Control and Reachability Analysis
Oct 01, 2024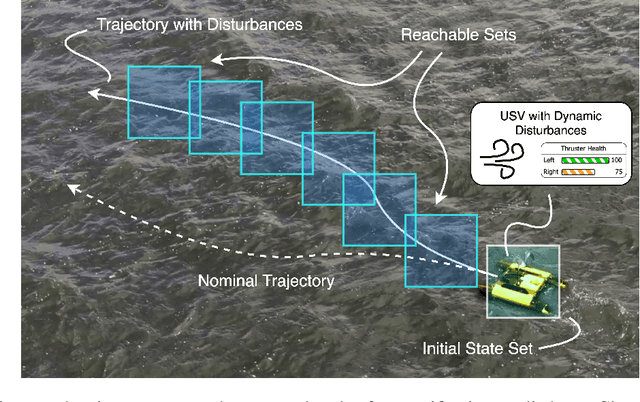
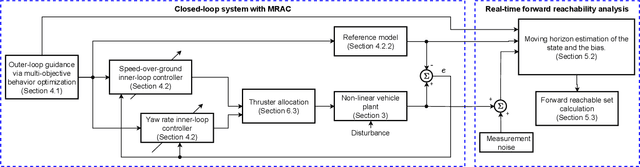
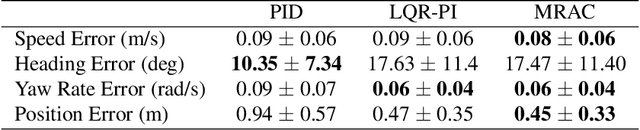
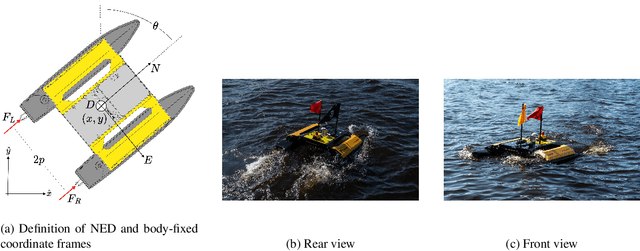
Marine robots must maintain precise control and ensure safety during tasks like ocean monitoring, even when encountering unpredictable disturbances that affect performance. Designing algorithms for uncrewed surface vehicles (USVs) requires accounting for these disturbances to control the vehicle and ensure it avoids obstacles. While adaptive control has addressed USV control challenges, real-world applications are limited, and certifying USV safety amidst unexpected disturbances remains difficult. To tackle control issues, we employ a model reference adaptive controller (MRAC) to stabilize the USV along a desired trajectory. For safety certification, we developed a reachability module with a moving horizon estimator (MHE) to estimate disturbances affecting the USV. This estimate is propagated through a forward reachable set calculation, predicting future states and enabling real-time safety certification. We tested our safe autonomy pipeline on a Clearpath Heron USV in the Charles River, near MIT. Our experiments demonstrated that the USV's MRAC controller and reachability module could adapt to disturbances like thruster failures and drag forces. The MRAC controller outperformed a PID baseline, showing a 45%-81% reduction in RMSE position error. Additionally, the reachability module provided real-time safety certification, ensuring the USV's safety. We further validated our pipeline's effectiveness in underway replenishment and canal scenarios, simulating relevant marine tasks.
Playing with Food: Learning Food Item Representations through Interactive Exploration
Jan 06, 2021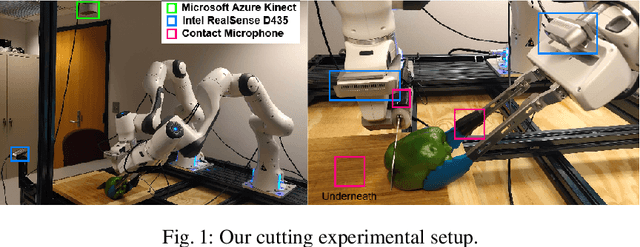
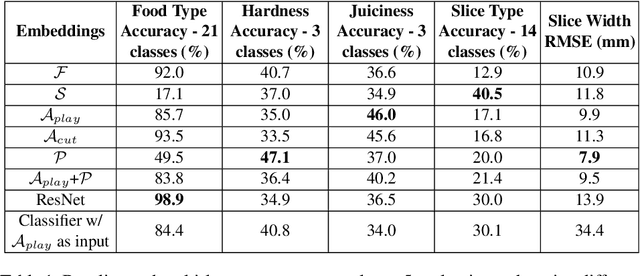

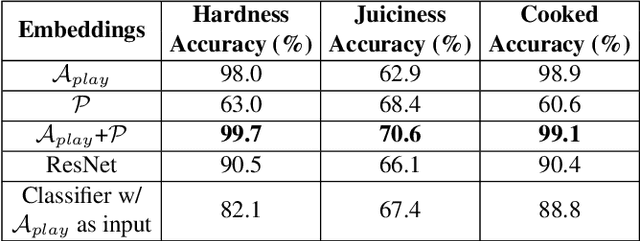
A key challenge in robotic food manipulation is modeling the material properties of diverse and deformable food items. We propose using a multimodal sensory approach to interact and play with food that facilitates the ability to distinguish these properties across food items. First, we use a robotic arm and an array of sensors, which are synchronized using ROS, to collect a diverse dataset consisting of 21 unique food items with varying slices and properties. Afterwards, we learn visual embedding networks that utilize a combination of proprioceptive, audio, and visual data to encode similarities among food items using a triplet loss formulation. Our evaluations show that embeddings learned through interactions can successfully increase performance in a wide range of material and shape classification tasks. We envision that these learned embeddings can be utilized as a basis for planning and selecting optimal parameters for more material-aware robotic food manipulation skills. Furthermore, we hope to stimulate further innovations in the field of food robotics by sharing this food playing dataset with the research community.
Learning Skills to Patch Plans Based on Inaccurate Models
Sep 29, 2020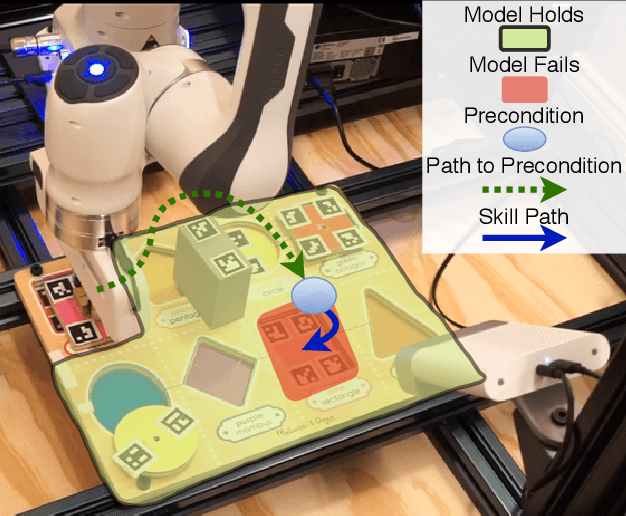
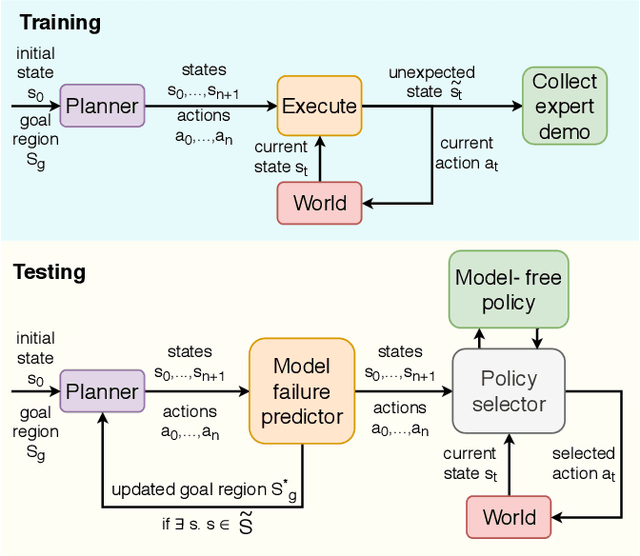
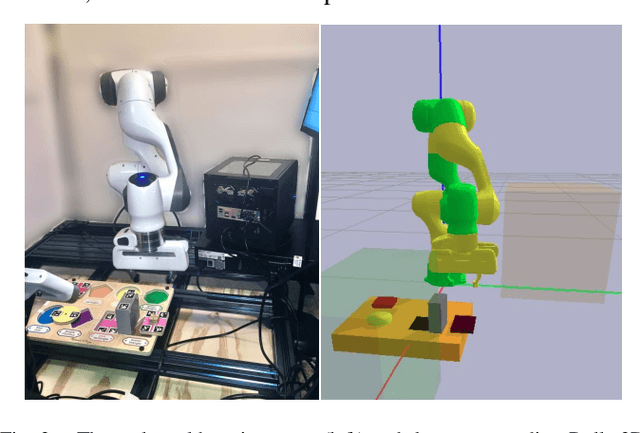
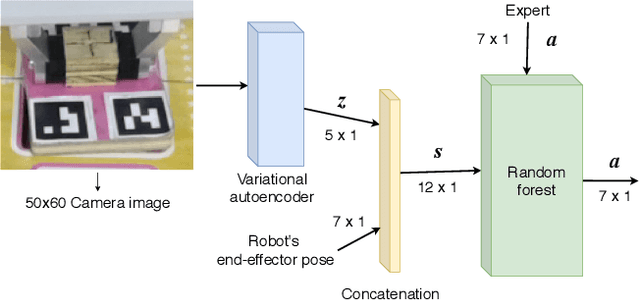
Planners using accurate models can be effective for accomplishing manipulation tasks in the real world, but are typically highly specialized and require significant fine-tuning to be reliable. Meanwhile, learning is useful for adaptation, but can require a substantial amount of data collection. In this paper, we propose a method that improves the efficiency of sub-optimal planners with approximate but simple and fast models by switching to a model-free policy when unexpected transitions are observed. Unlike previous work, our method specifically addresses when the planner fails due to transition model error by patching with a local policy only where needed. First, we use a sub-optimal model-based planner to perform a task until model failure is detected. Next, we learn a local model-free policy from expert demonstrations to complete the task in regions where the model failed. To show the efficacy of our method, we perform experiments with a shape insertion puzzle and compare our results to both pure planning and imitation learning approaches. We then apply our method to a door opening task. Our experiments demonstrate that our patch-enhanced planner performs more reliably than pure planning and with lower overall sample complexity than pure imitation learning.
Anomaly Detection in Bitcoin Network Using Unsupervised Learning Methods
Feb 25, 2017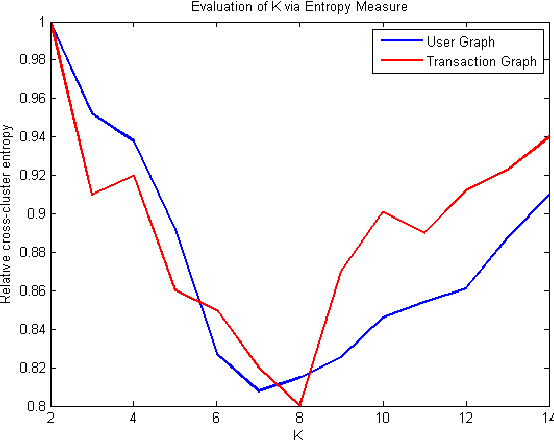
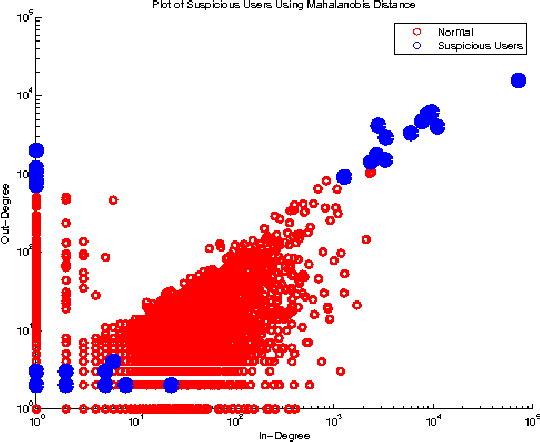
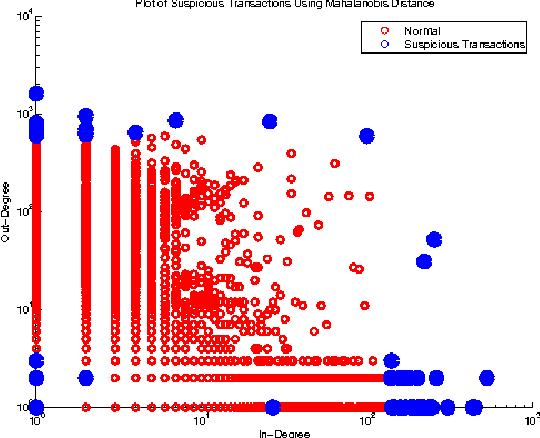
The problem of anomaly detection has been studied for a long time. In short, anomalies are abnormal or unlikely things. In financial networks, thieves and illegal activities are often anomalous in nature. Members of a network want to detect anomalies as soon as possible to prevent them from harming the network's community and integrity. Many Machine Learning techniques have been proposed to deal with this problem; some results appear to be quite promising but there is no obvious superior method. In this paper, we consider anomaly detection particular to the Bitcoin transaction network. Our goal is to detect which users and transactions are the most suspicious; in this case, anomalous behavior is a proxy for suspicious behavior. To this end, we use three unsupervised learning methods including k-means clustering, Mahalanobis distance, and Unsupervised Support Vector Machine (SVM) on two graphs generated by the Bitcoin transaction network: one graph has users as nodes, and the other has transactions as nodes.