 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Autonomy for Uncrewed Surface Vehicles Using Adaptive Control and Reachability Analysis
Oct 01, 2024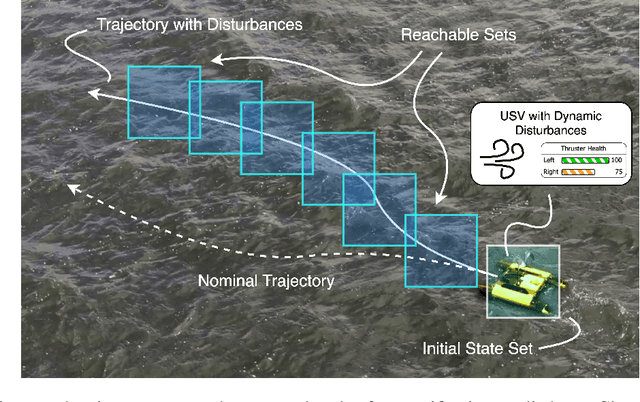
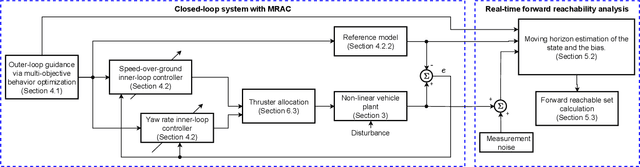
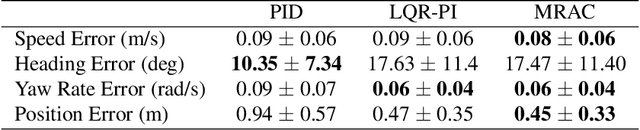
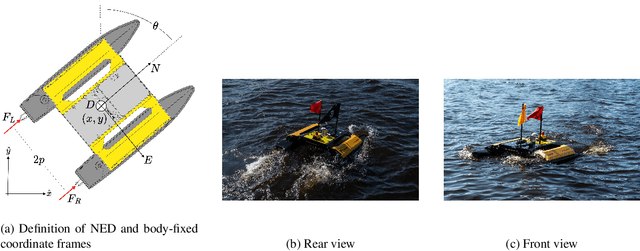
Marine robots must maintain precise control and ensure safety during tasks like ocean monitoring, even when encountering unpredictable disturbances that affect performance. Designing algorithms for uncrewed surface vehicles (USVs) requires accounting for these disturbances to control the vehicle and ensure it avoids obstacles. While adaptive control has addressed USV control challenges, real-world applications are limited, and certifying USV safety amidst unexpected disturbances remains difficult. To tackle control issues, we employ a model reference adaptive controller (MRAC) to stabilize the USV along a desired trajectory. For safety certification, we developed a reachability module with a moving horizon estimator (MHE) to estimate disturbances affecting the USV. This estimate is propagated through a forward reachable set calculation, predicting future states and enabling real-time safety certification. We tested our safe autonomy pipeline on a Clearpath Heron USV in the Charles River, near MIT. Our experiments demonstrated that the USV's MRAC controller and reachability module could adapt to disturbances like thruster failures and drag forces. The MRAC controller outperformed a PID baseline, showing a 45%-81% reduction in RMSE position error. Additionally, the reachability module provided real-time safety certification, ensuring the USV's safety. We further validated our pipeline's effectiveness in underway replenishment and canal scenarios, simulating relevant marine tasks.
Machine learning based hyperspectral image analysis: A survey
Feb 23, 2018



Hyperspectral sensors enable the study of the chemical properties of scene materials remotely for the purpose of identification, detection, and chemical composition analysis of objects in the environment. Hence, hyperspectral images captured from earth observing satellites and aircraft have been increasingly important in agriculture, environmental monitoring, urban planning, mining, and defense. Machine learning algorithms due to their outstanding predictive power have become a key tool for modern hyperspectral image analysis. Therefore, a solid understanding of machine learning techniques have become essential for remote sensing researchers and practitioners. This paper reviews and compares recent machine learning-based hyperspectral image analysis methods published in literature. We organize the methods by the image analysis task and by the type of machine learning algorithm, and present a two-way mapping between the image analysis tasks and the types of machine learning algorithms that can be applied to them. The paper is comprehensive in coverage of both hyperspectral image analysis tasks and machine learning algorithms. The image analysis tasks considered are land cover classification, target detection, unmixing, and physical parameter estimation. The machine learning algorithms covered are Gaussian models, linear regression, logistic regression, support vector machines, Gaussian mixture model, latent linear models, sparse linear models, Gaussian mixture models, ensemble learning, directed graphical models, undirected graphical models, clustering, Gaussian processes, Dirichlet processes, and deep learning. We also discuss the open challenges in the field of hyperspectral image analysis and explore possible future directions.
A Tutorial on Modeling and Inference in Undirected Graphical Models for Hyperspectral Image Analysis
Jan 25, 2018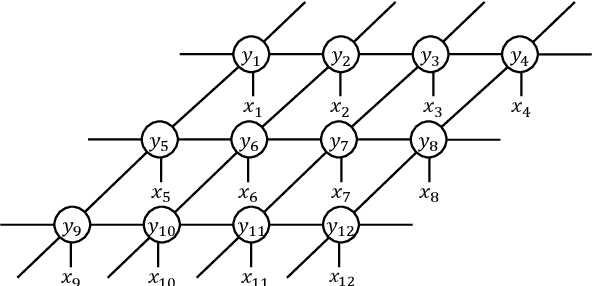
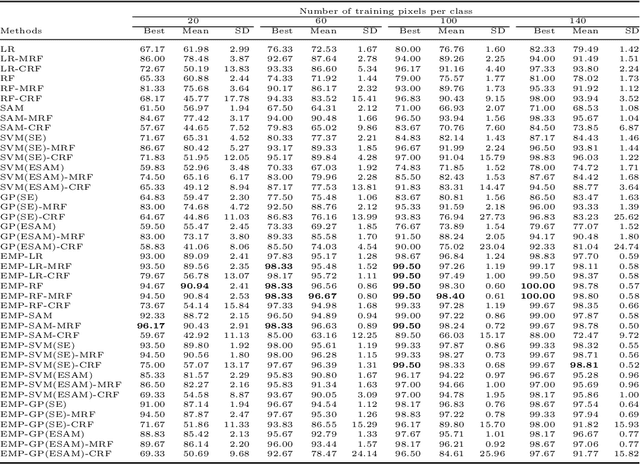
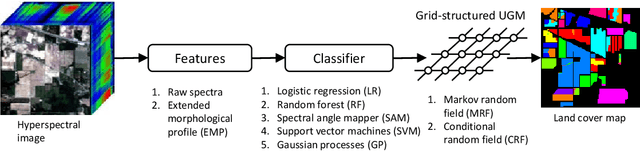
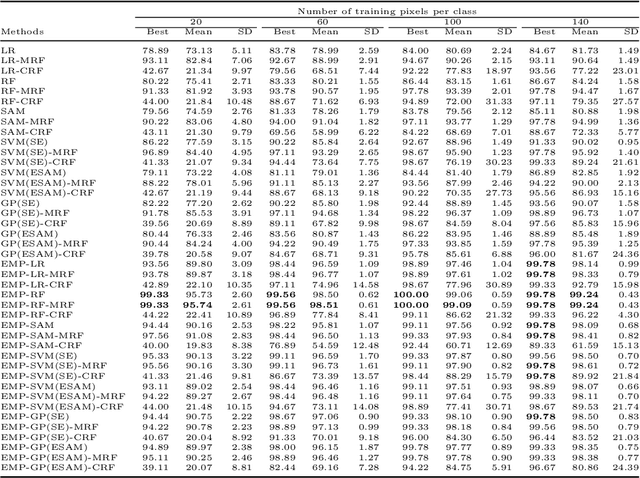
Undirected graphical models have been successfully used to jointly model the spatial and the spectral dependencies in earth observing hyperspectral images. They produce less noisy, smooth, and spatially coherent land cover maps and give top accuracies on many datasets. Moreover, they can easily be combined with other state-of-the-art approaches, such as deep learning. This has made them an essential tool for remote sensing researchers and practitioners. However, graphical models have not been easily accessible to the larger remote sensing community as they are not discussed in standard remote sensing textbooks and not included in the popular remote sensing software and toolboxes. In this tutorial, we provide a theoretical introduction to Markov random fields and conditional random fields based spatial-spectral classification for land cover mapping along with a detailed step-by-step practical guide on applying these methods using freely available software. Furthermore, the discussed methods are benchmarked on four public hyperspectral datasets for a fair comparison among themselves and easy comparison with the vast number of methods in literature which use the same datasets. The source code necessary to reproduce all the results in the paper is published on-line to make it easier for the readers to apply these techniques to different remote sensing problems.
Multitask Learning of Vegetation Biochemistry from Hyperspectral Data
Oct 22, 2016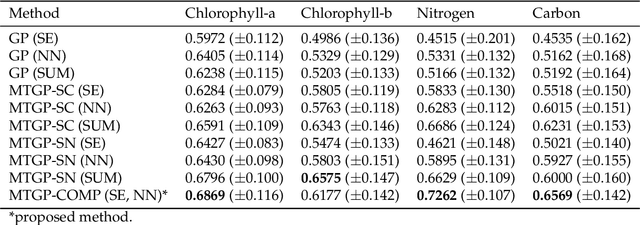
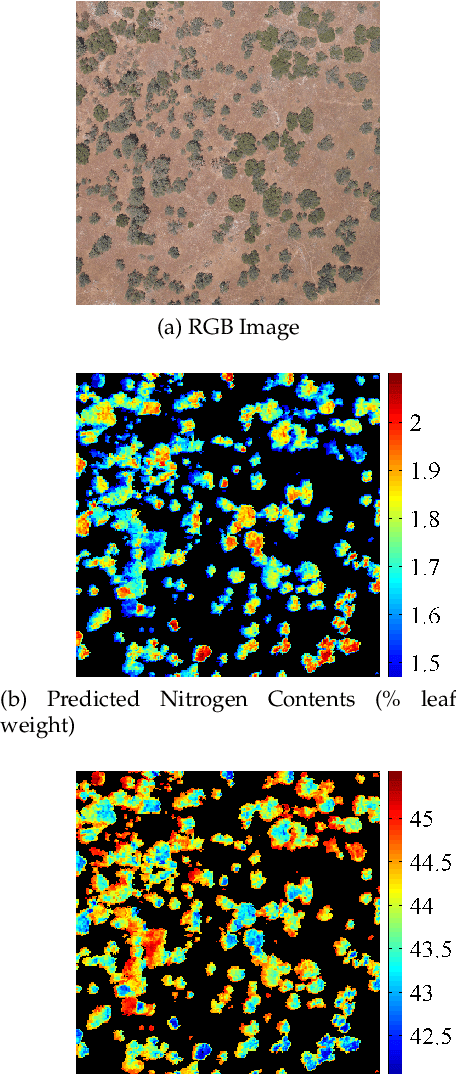
Statistical models have been successful in accurately estimating the biochemical contents of vegetation from the reflectance spectra. However, their performance deteriorates when there is a scarcity of sizable amount of ground truth data for modeling the complex non-linear relationship occurring between the spectrum and the biochemical quantity. We propose a novel Gaussian process based multitask learning method for improving the prediction of a biochemical through the transfer of knowledge from the learned models for predicting related biochemicals. This method is most advantageous when there are few ground truth data for the biochemical of interest, but plenty of ground truth data for related biochemicals. The proposed multitask Gaussian process hypothesizes that the inter-relationship between the biochemical quantities is better modeled by using a combination of two or more covariance functions and inter-task correlation matrices. In the experiments, our method outperformed the current methods on two real-world datasets.
Spectral Angle Based Unary Energy Functions for Spatial-Spectral Hyperspectral Classification using Markov Random Fields
Oct 22, 2016
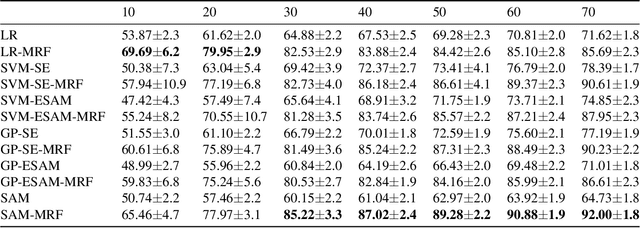
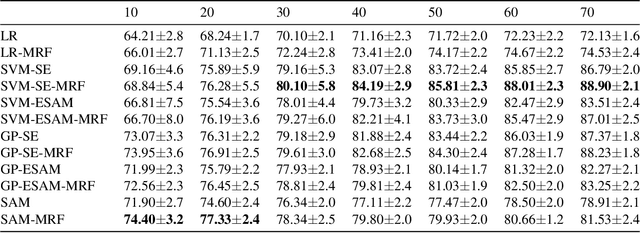
In this paper, we propose and compare two spectral angle based approaches for spatial-spectral classification. Our methods use the spectral angle to generate unary energies in a grid-structured Markov random field defined over the pixel labels of a hyperspectral image. The first approach is to use the exponential spectral angle mapper (ESAM) kernel/covariance function, a spectral angle based function, with the support vector machine and the Gaussian process classifier. The second approach is to directly use the minimum spectral angle between the test pixel and the training pixels as the unary energy. We compare the proposed methods with the state-of-the-art Markov random field methods that use support vector machines and Gaussian processes with squared exponential kernel/covariance function. In our experiments with two datasets, it is seen that using minimum spectral angle as unary energy produces better or comparable results to the existing methods at a smaller running time.