 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlaying with Food: Learning Food Item Representations through Interactive Exploration
Jan 06, 2021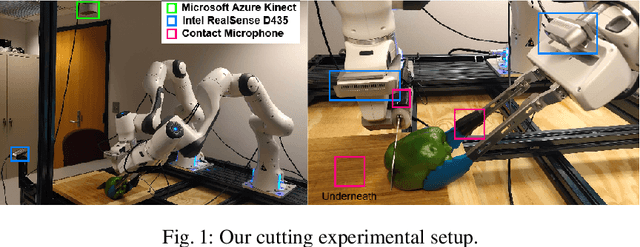

A key challenge in robotic food manipulation is modeling the material properties of diverse and deformable food items. We propose using a multimodal sensory approach to interact and play with food that facilitates the ability to distinguish these properties across food items. First, we use a robotic arm and an array of sensors, which are synchronized using ROS, to collect a diverse dataset consisting of 21 unique food items with varying slices and properties. Afterwards, we learn visual embedding networks that utilize a combination of proprioceptive, audio, and visual data to encode similarities among food items using a triplet loss formulation. Our evaluations show that embeddings learned through interactions can successfully increase performance in a wide range of material and shape classification tasks. We envision that these learned embeddings can be utilized as a basis for planning and selecting optimal parameters for more material-aware robotic food manipulation skills. Furthermore, we hope to stimulate further innovations in the field of food robotics by sharing this food playing dataset with the research community.