 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Arrival Rate Estimation for Campus Mobility on Demand Network Graphs
Mar 06, 2017
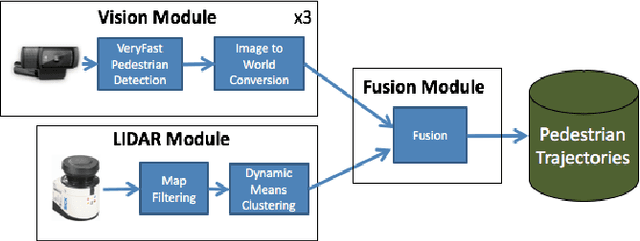


Mobility On Demand (MOD) systems are revolutionizing transportation in urban settings by improving vehicle utilization and reducing parking congestion. A key factor in the success of an MOD system is the ability to measure and respond to real-time customer arrival data. Real time traffic arrival rate data is traditionally difficult to obtain due to the need to install fixed sensors throughout the MOD network. This paper presents a framework for measuring pedestrian traffic arrival rates using sensors onboard the vehicles that make up the MOD fleet. A novel distributed fusion algorithm is presented which combines onboard LIDAR and camera sensor measurements to detect trajectories of pedestrians with a 90% detection hit rate with 1.5 false positives per minute. A novel moving observer method is introduced to estimate pedestrian arrival rates from pedestrian trajectories collected from mobile sensors. The moving observer method is evaluated in both simulation and hardware and is shown to achieve arrival rate estimates comparable to those that would be obtained with multiple stationary sensors.
* Appears in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). http://ieeexplore.ieee.org/abstract/document/7759357/