 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Human-Robot Interaction via Operator Imitation
Apr 03, 2025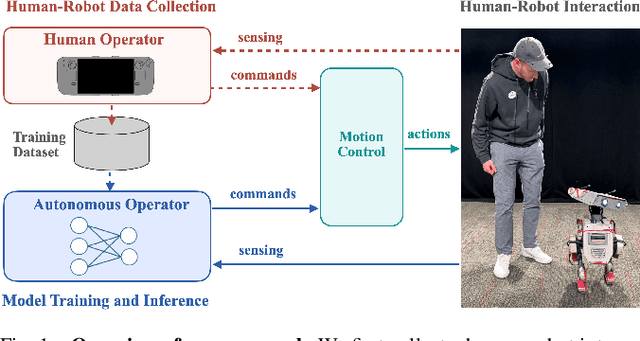
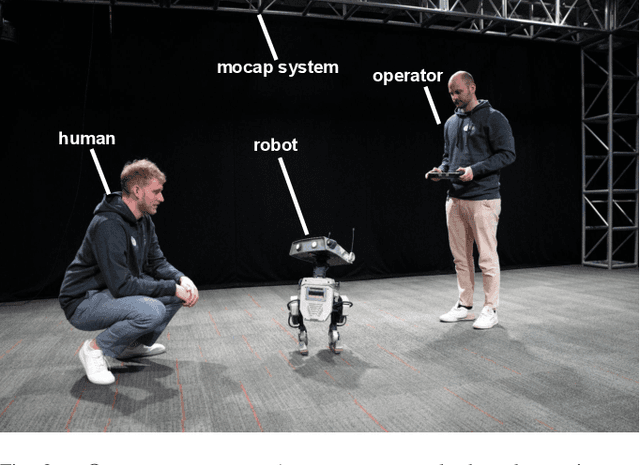


Teleoperated robotic characters can perform expressive interactions with humans, relying on the operators' experience and social intuition. In this work, we propose to create autonomous interactive robots, by training a model to imitate operator data. Our model is trained on a dataset of human-robot interactions, where an expert operator is asked to vary the interactions and mood of the robot, while the operator commands as well as the pose of the human and robot are recorded. Our approach learns to predict continuous operator commands through a diffusion process and discrete commands through a classifier, all unified within a single transformer architecture. We evaluate the resulting model in simulation and with a user study on the real system. We show that our method enables simple autonomous human-robot interactions that are comparable to the expert-operator baseline, and that users can recognize the different robot moods as generated by our model. Finally, we demonstrate a zero-shot transfer of our model onto a different robotic platform with the same operator interface.
Design and Control of a Bipedal Robotic Character
Jan 09, 2025



Legged robots have achieved impressive feats in dynamic locomotion in challenging unstructured terrain. However, in entertainment applications, the design and control of these robots face additional challenges in appealing to human audiences. This work aims to unify expressive, artist-directed motions and robust dynamic mobility for legged robots. To this end, we introduce a new bipedal robot, designed with a focus on character-driven mechanical features. We present a reinforcement learning-based control architecture to robustly execute artistic motions conditioned on command signals. During runtime, these command signals are generated by an animation engine which composes and blends between multiple animation sources. Finally, an intuitive operator interface enables real-time show performances with the robot. The complete system results in a believable robotic character, and paves the way for enhanced human-robot engagement in various contexts, in entertainment robotics and beyond.
Footstep Planning for Autonomous Walking Over Rough Terrain
Jul 19, 2019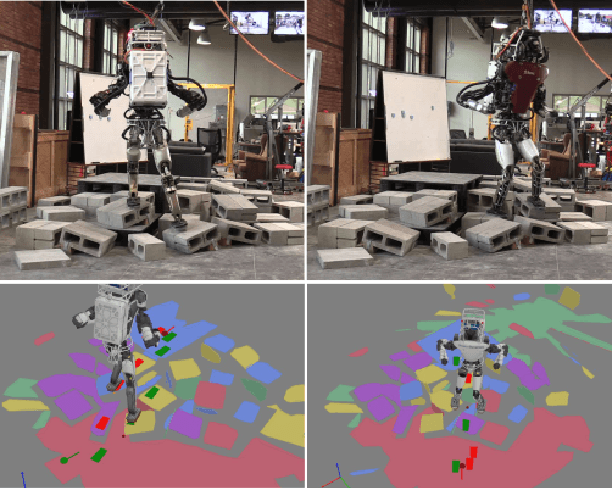
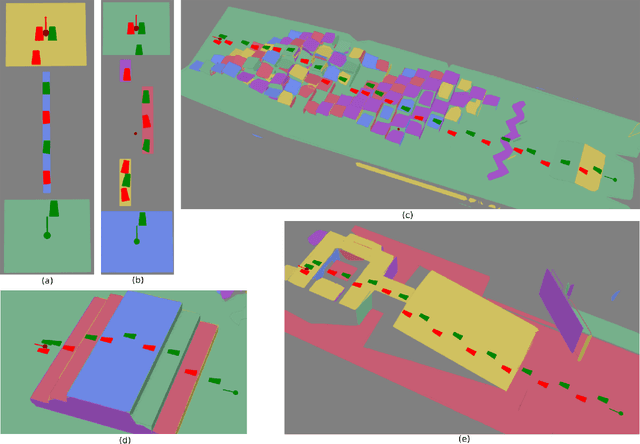
To increase the speed of operation and reduce operator burden, humanoid robots must be able to function autonomously, even in complex, cluttered environments. For this to be possible, they must be able to quickly and efficiently compute desired footsteps to reach a goal. In this work, we present a new A* footstep planner that utilizes a planar region representation of the environment enable footstep planning over rough terrain. To increase the number of available footholds, we present an approach to allow the use of partial footholds during the planning process. The footstep plan solutions are then post-processed to capture better solutions that lie between the lattice discretization of the footstep graph. We then demonstrate this planner over a variety of virtual and real world environments, including some that require partial footholds and rough terrain using the Atlas and Valkyrie humanoid robots.
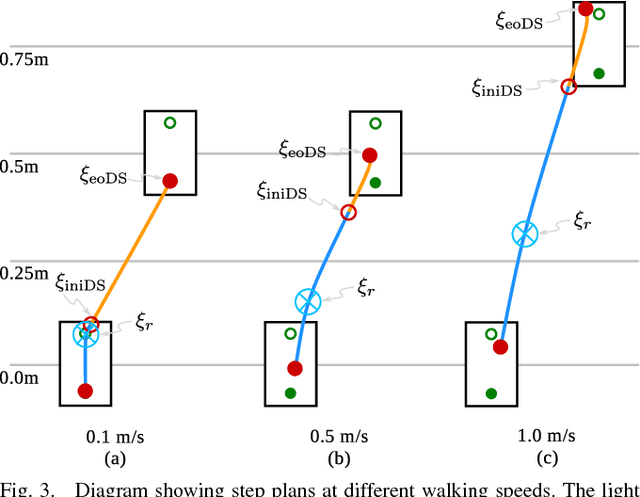
Capture Point Trajectories for Reduced Knee Bend using Step Time Optimization
Dec 27, 2017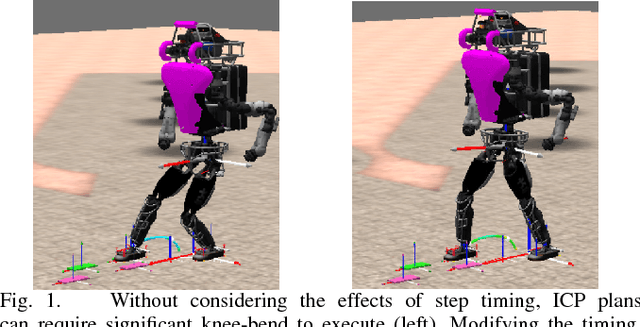
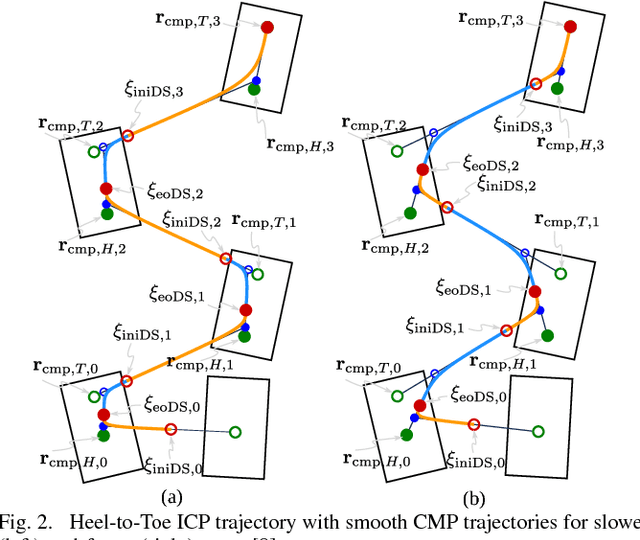
Traditional force-controlled bipedal walking utilizes highly bent knees, resulting in high torques as well as inefficient, and unnatural motions. Even with advanced planning of center of mass height trajectories, significant amounts of knee-bend can be required due to arbitrarily chosen step timing. In this work, we present a method that examines the effects of adjusting the step timing to produce plans that only require a specified amount of knee bend to execute. We define a quadratic program that optimizes the step timings and is executed using a simple iterative feedback approach to account for higher order terms. We then illustrate the effectiveness of this algorithm by comparing the walking gait of the simulated Atlas humanoid with and without the algorithm, showing that the algorithm significantly reduces the required knee bend for execution. We aim to later use this approach to achieve natural, efficient walking motions on humanoid robot platforms.
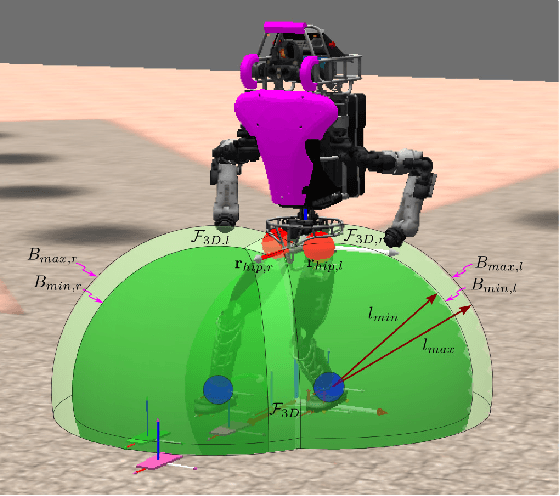
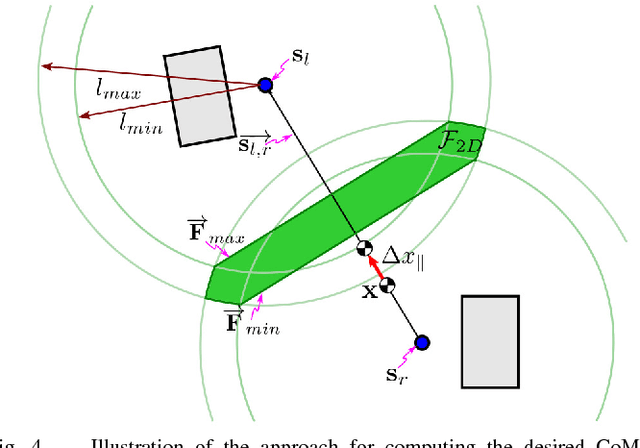
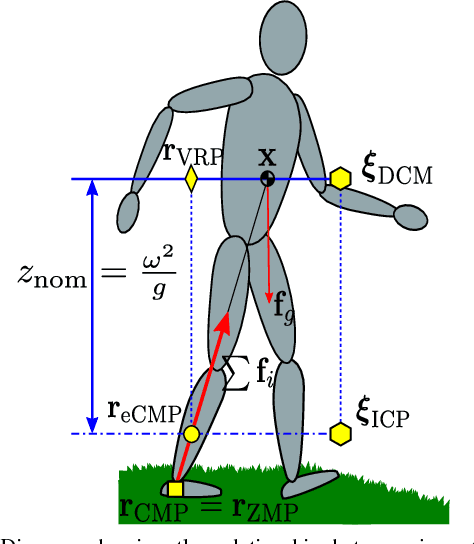
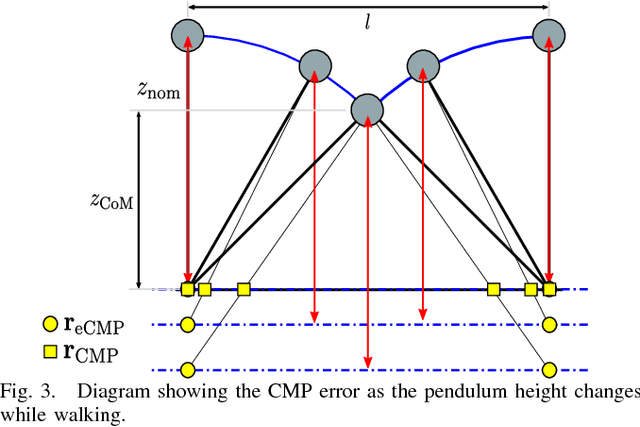
Walking Stabilization Using Step Timing and Location Adjustment on the Humanoid Robot, Atlas
Dec 27, 2017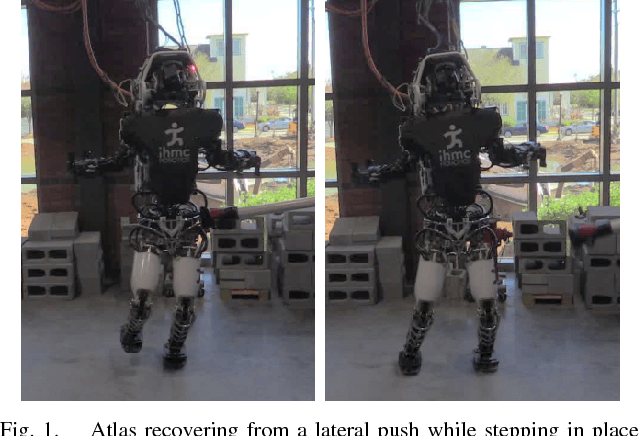
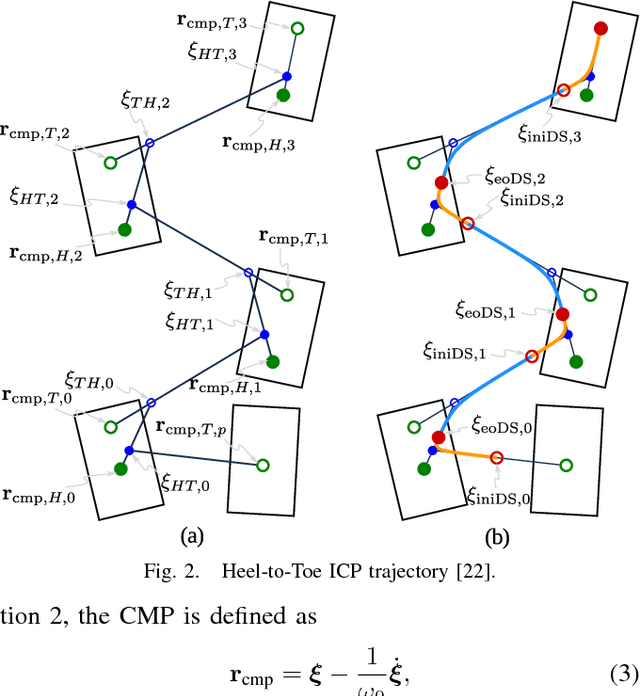
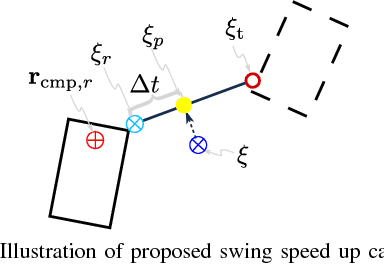
While humans are highly capable of recovering from external disturbances and uncertainties that result in large tracking errors, humanoid robots have yet to reliably mimic this level of robustness. Essential to this is the ability to combine traditional "ankle strategy" balancing with step timing and location adjustment techniques. In doing so, the robot is able to step quickly to the necessary location to continue walking. In this work, we present both a new swing speed up algorithm to adjust the step timing, allowing the robot to set the foot down more quickly to recover from errors in the direction of the current capture point dynamics, and a new algorithm to adjust the desired footstep, expanding the base of support to utilize the center of pressure (CoP)-based ankle strategy for balance. We then utilize the desired centroidal moment pivot (CMP) to calculate the momentum rate of change for our inverse-dynamics based whole-body controller. We present simulation and experimental results using this work, and discuss performance limitations and potential improvements.
Straight-Leg Walking Through Underconstrained Whole-Body Control
Sep 12, 2017
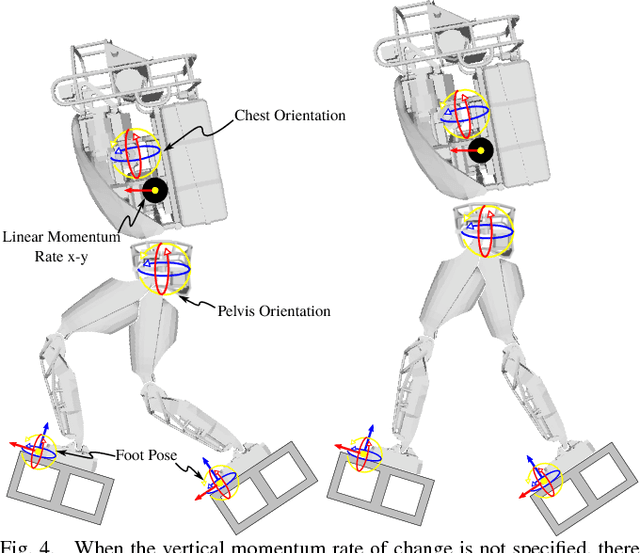
We present an approach for achieving a natural, efficient gait on bipedal robots using straightened legs and toe-off. Our algorithm avoids complex height planning by allowing a whole-body controller to determine the straightest possible leg configuration at run-time. The controller solutions are biased towards a straight leg configuration by projecting leg joint angle objectives into the null-space of the other quadratic program motion objectives. To allow the legs to remain straight throughout the gait, toe-off was utilized to increase the kinematic reachability of the legs. The toe-off motion is achieved through underconstraining the foot position, allowing it to emerge naturally. We applied this approach of under-specifying the motion objectives to the Atlas humanoid, allowing it to walk over a variety of terrain. We present both experimental and simulation results and discuss performance limitations and potential improvements.
Walking on Partial Footholds Including Line Contacts with the Humanoid Robot Atlas
Jan 12, 2017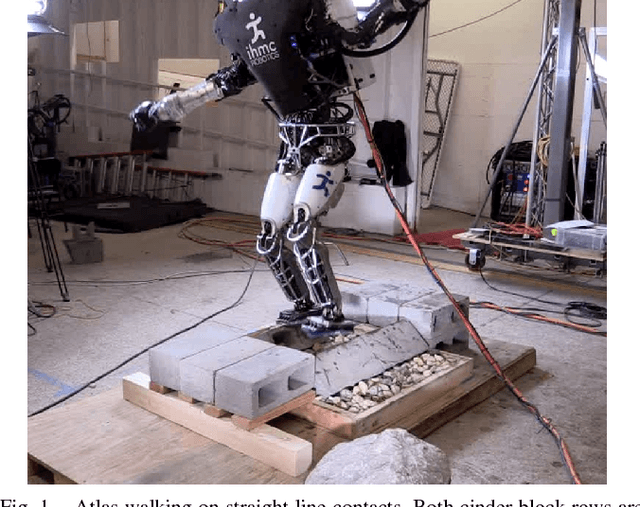

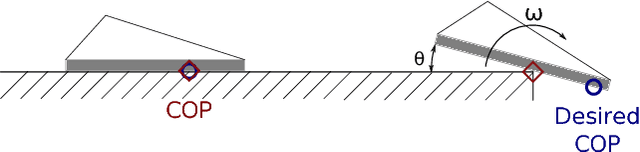
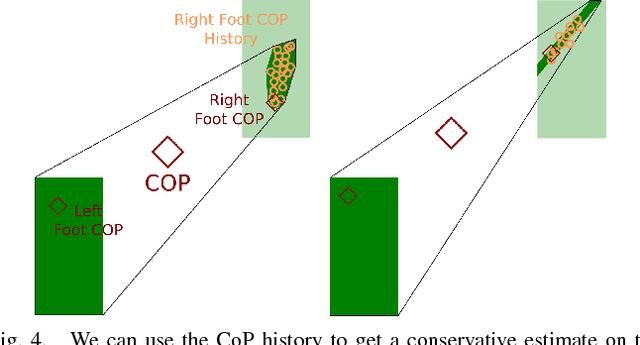
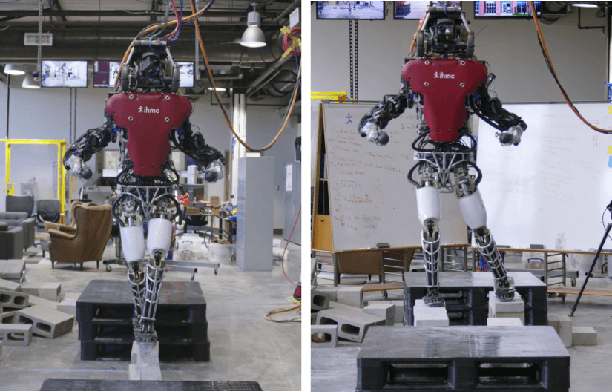
We present a method for humanoid robot walking on partial footholds such as small stepping stones and rocks with sharp surfaces. Our algorithm does not rely on prior knowledge of the foothold, but information about an expected foothold can be used to improve the stepping performance. After a step is taken, the robot explores the new contact surface by attempting to shift the center of pressure around the foot. The available foothold is inferred by the way in which the foot rotates about contact edges and/or by the achieved center of pressure locations on the foot during exploration. This estimated contact area is then used by a whole body momentum-based control algorithm. To walk and balance on partial footholds, we combine fast, dynamic stepping with the use of upper body angular momentum to regain balance. We applied this method to the Atlas humanoid designed by Boston Dynamics to walk over small contact surfaces, such as line and point contacts. We present experimental results and discuss performance limitations.