 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoCo-InEKF: State Estimation with Learned Contact Covariances in Dynamic, Contact-Rich Scenarios
May 14, 2026Robust state estimation for highly dynamic motion of legged robots remains challenging, especially in dynamic, contact-rich scenarios. Traditional approaches often rely on binary contact states that fail to capture the nuances of partial contact or directional slippage. This paper presents CoCo-InEKF, a differentiable invariant extended Kalman filter that utilizes continuous contact velocity covariances instead of binary contact states. These learned covariances allow the method to dynamically modulate contact confidence, accounting for more nuanced conditions ranging from firm contact to directional slippage or no contact. To predict these covariances for a set of predefined contact candidate points, we employ a lightweight neural network trained end-to-end using a state-error loss. This approach eliminates the need for heuristic ground-truth contact labels. In addition, we propose an automated contact candidate selection procedure and demonstrate that our method is insensitive to their exact placement. Experiments on a bipedal robot demonstrate a superior accuracy-efficiency tradeoff for linear velocity estimation, as well as improved filter consistency compared to baseline methods. This enables the robust execution of challenging motions, including dancing and complex ground interactions -- both in simulation and in the real world.
ReActor: Reinforcement Learning for Physics-Aware Motion Retargeting
May 07, 2026Retargeting human kinematic reference motion onto a robot's morphology remains a formidable challenge. Existing methods often produce physical inconsistencies, such as foot sliding, self-collisions, or dynamically infeasible motions, which hinder downstream imitation learning. We propose a bilevel optimization framework that jointly adapts reference motions to a robot's morphology while training a tracking policy using reinforcement learning. To make the optimization tractable, we derive an approximate gradient for the upper-level loss. Our framework requires only a sparse set of semantic rigid-body correspondences and eliminates the need for manual tuning by identifying optimal values for a parameterization expressive enough to preserve characteristic motion across different embodiments. Moreover, by integrating retargeting directly with physics simulation, we produce physically plausible motions that facilitate robust imitation learning. We validate our method in simulation and on hardware, demonstrating challenging motions for morphologies that differ significantly from a human, including retargeting onto a quadruped.
Kamino: GPU-based Massively Parallel Simulation of Multi-Body Systems with Challenging Topologies
Mar 17, 2026We present Kamino, a GPU-based physics solver for massively parallel simulations of heterogeneous highly-coupled mechanical systems. Implemented in Python using NVIDIA Warp and integrated into the Newton framework, it enables the application of data-driven methods, such as large-scale reinforcement learning, to complex robotic systems that exhibit strongly coupled kinematic and dynamic constraints such as kinematic loops. The latter are often circumvented by practitioners; approximating the system topology as a kinematic tree and incorporating explicit loop-closure constraints or so-called mimic joints. Kamino aims at alleviating this burden by natively supporting these types of coupling. This capability facilitates high-throughput parallelized simulations that capture the true nature of mechanical systems that exploit closed kinematic chains for mechanical advantage. Moreover, Kamino supports heterogeneous worlds, allowing for batched simulation of structurally diverse robots on a single GPU. At its core lies a state-of-the-art constrained optimization algorithm that computes constraint forces by solving the constrained rigid multi-body forward dynamics transcribed as a nonlinear complementarity problem. This leads to high-fidelity simulations that can resolve contact dynamics without resorting to approximate models that simplify and/or convexify the problem. We demonstrate RL policy training on DR Legs, a biped with six nested kinematic loops, generating a feasible walking policy while simulating 4096 parallel environments on a single GPU.
Olaf: Bringing an Animated Character to Life in the Physical World
Dec 18, 2025
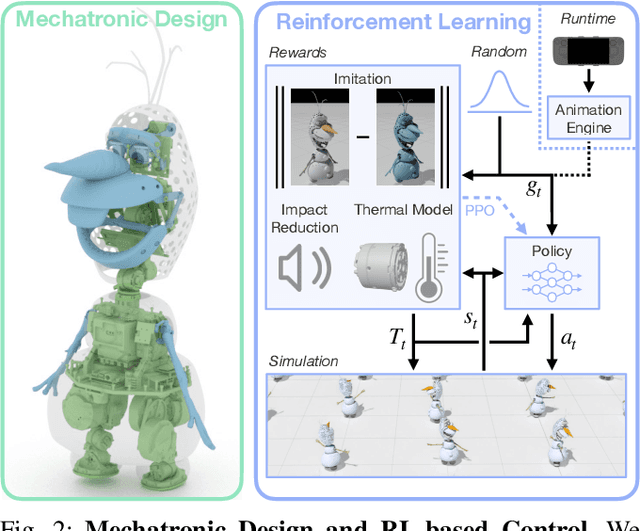
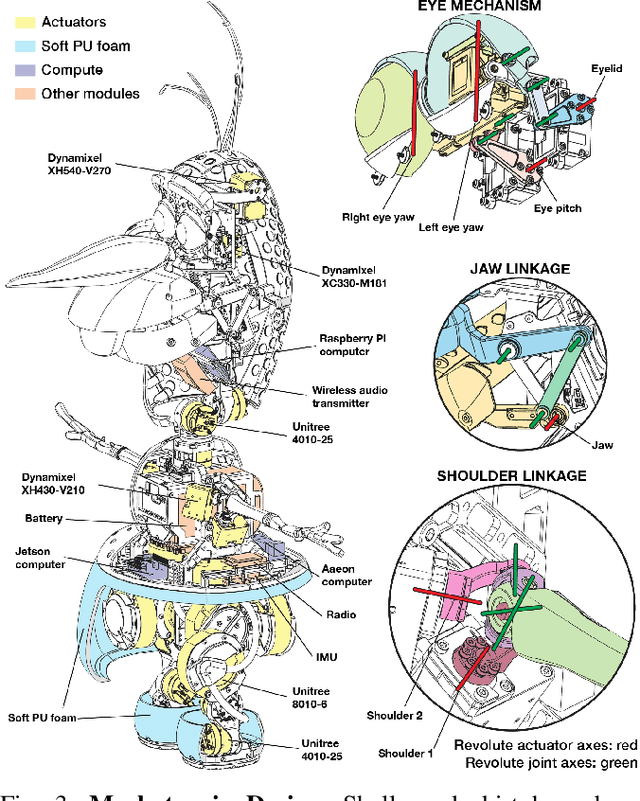
Animated characters often move in non-physical ways and have proportions that are far from a typical walking robot. This provides an ideal platform for innovation in both mechanical design and stylized motion control. In this paper, we bring Olaf to life in the physical world, relying on reinforcement learning guided by animation references for control. To create the illusion of Olaf's feet moving along his body, we hide two asymmetric legs under a soft foam skirt. To fit actuators inside the character, we use spherical and planar linkages in the arms, mouth, and eyes. Because the walk cycle results in harsh contact sounds, we introduce additional rewards that noticeably reduce impact noise. The large head, driven by small actuators in the character's slim neck, creates a risk of overheating, amplified by the costume. To keep actuators from overheating, we feed temperature values as additional inputs to policies, introducing new rewards to keep them within bounds. We validate the efficacy of our modeling in simulation and on hardware, demonstrating an unmatched level of believability for a costumed robotic character.
Robot Crash Course: Learning Soft and Stylized Falling
Nov 13, 2025Despite recent advances in robust locomotion, bipedal robots operating in the real world remain at risk of falling. While most research focuses on preventing such events, we instead concentrate on the phenomenon of falling itself. Specifically, we aim to reduce physical damage to the robot while providing users with control over a robot's end pose. To this end, we propose a robot agnostic reward function that balances the achievement of a desired end pose with impact minimization and the protection of critical robot parts during reinforcement learning. To make the policy robust to a broad range of initial falling conditions and to enable the specification of an arbitrary and unseen end pose at inference time, we introduce a simulation-based sampling strategy of initial and end poses. Through simulated and real-world experiments, our work demonstrates that even bipedal robots can perform controlled, soft falls.
AMOR: Adaptive Character Control through Multi-Objective Reinforcement Learning
May 29, 2025Reinforcement learning (RL) has significantly advanced the control of physics-based and robotic characters that track kinematic reference motion. However, methods typically rely on a weighted sum of conflicting reward functions, requiring extensive tuning to achieve a desired behavior. Due to the computational cost of RL, this iterative process is a tedious, time-intensive task. Furthermore, for robotics applications, the weights need to be chosen such that the policy performs well in the real world, despite inevitable sim-to-real gaps. To address these challenges, we propose a multi-objective reinforcement learning framework that trains a single policy conditioned on a set of weights, spanning the Pareto front of reward trade-offs. Within this framework, weights can be selected and tuned after training, significantly speeding up iteration time. We demonstrate how this improved workflow can be used to perform highly dynamic motions with a robot character. Moreover, we explore how weight-conditioned policies can be leveraged in hierarchical settings, using a high-level policy to dynamically select weights according to the current task. We show that the multi-objective policy encodes a diverse spectrum of behaviors, facilitating efficient adaptation to novel tasks.
Autonomous Human-Robot Interaction via Operator Imitation
Apr 03, 2025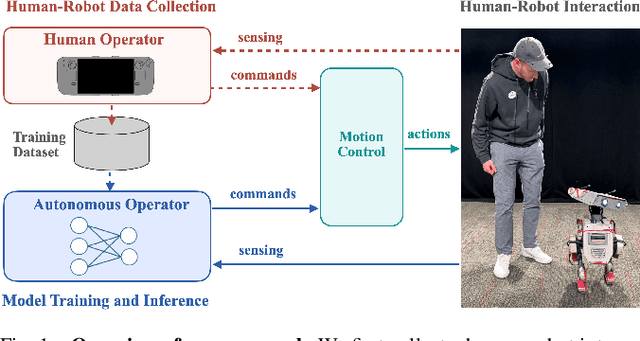
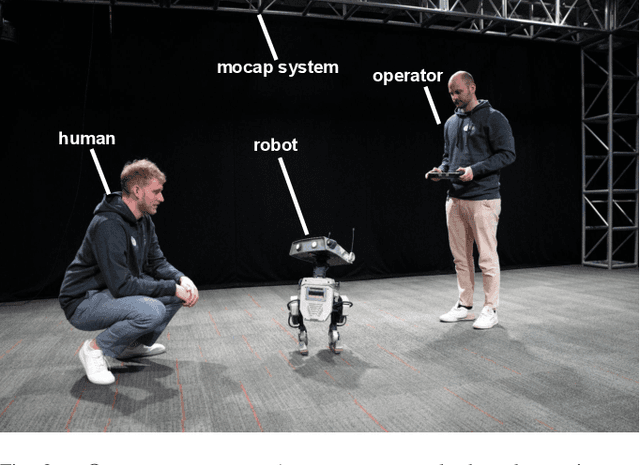


Teleoperated robotic characters can perform expressive interactions with humans, relying on the operators' experience and social intuition. In this work, we propose to create autonomous interactive robots, by training a model to imitate operator data. Our model is trained on a dataset of human-robot interactions, where an expert operator is asked to vary the interactions and mood of the robot, while the operator commands as well as the pose of the human and robot are recorded. Our approach learns to predict continuous operator commands through a diffusion process and discrete commands through a classifier, all unified within a single transformer architecture. We evaluate the resulting model in simulation and with a user study on the real system. We show that our method enables simple autonomous human-robot interactions that are comparable to the expert-operator baseline, and that users can recognize the different robot moods as generated by our model. Finally, we demonstrate a zero-shot transfer of our model onto a different robotic platform with the same operator interface.
Design and Control of a Bipedal Robotic Character
Jan 09, 2025



Legged robots have achieved impressive feats in dynamic locomotion in challenging unstructured terrain. However, in entertainment applications, the design and control of these robots face additional challenges in appealing to human audiences. This work aims to unify expressive, artist-directed motions and robust dynamic mobility for legged robots. To this end, we introduce a new bipedal robot, designed with a focus on character-driven mechanical features. We present a reinforcement learning-based control architecture to robustly execute artistic motions conditioned on command signals. During runtime, these command signals are generated by an animation engine which composes and blends between multiple animation sources. Finally, an intuitive operator interface enables real-time show performances with the robot. The complete system results in a believable robotic character, and paves the way for enhanced human-robot engagement in various contexts, in entertainment robotics and beyond.
Discrete Choice Multi-Armed Bandits
Oct 01, 2023


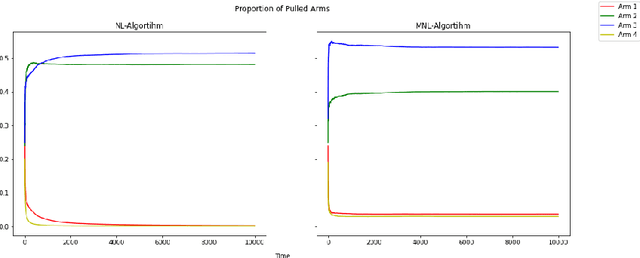
This paper establishes a connection between a category of discrete choice models and the realms of online learning and multiarmed bandit algorithms. Our contributions can be summarized in two key aspects. Firstly, we furnish sublinear regret bounds for a comprehensive family of algorithms, encompassing the Exp3 algorithm as a particular case. Secondly, we introduce a novel family of adversarial multiarmed bandit algorithms, drawing inspiration from the generalized nested logit models initially introduced by \citet{wen:2001}. These algorithms offer users the flexibility to fine-tune the model extensively, as they can be implemented efficiently due to their closed-form sampling distribution probabilities. To demonstrate the practical implementation of our algorithms, we present numerical experiments, focusing on the stochastic bandit case.
Improving HEVC Encoding of Rendered Video Data Using True Motion Information
Sep 13, 2023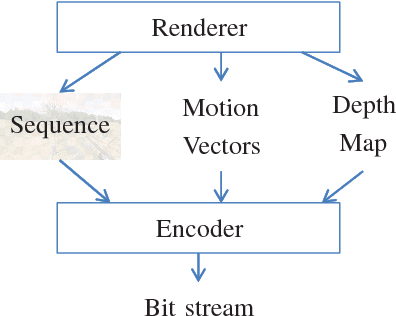
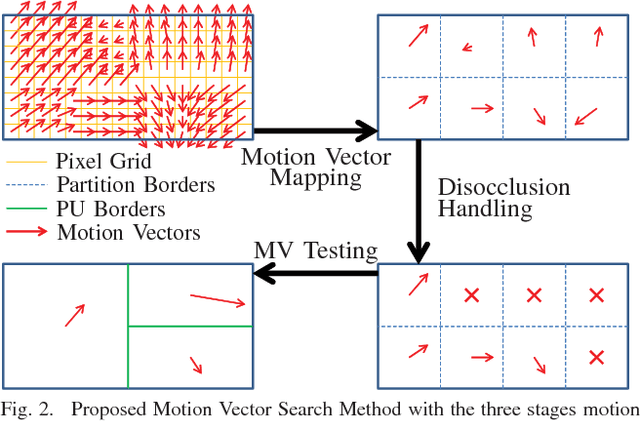
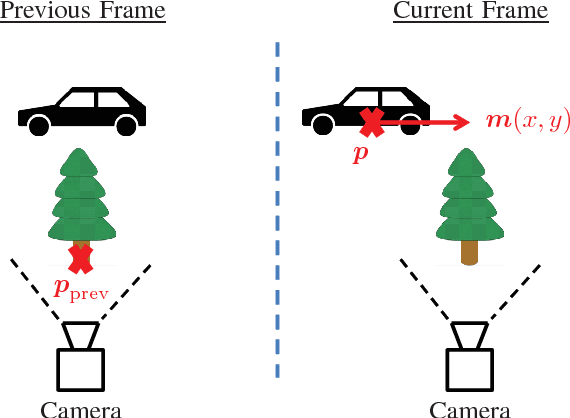
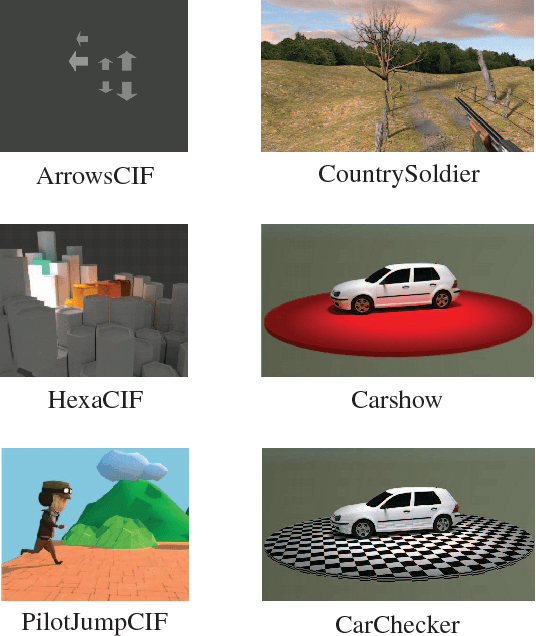
This paper shows that motion vectors representing the true motion of an object in a scene can be exploited to improve the encoding process of computer generated video sequences. Therefore, a set of sequences is presented for which the true motion vectors of the corresponding objects were generated on a per-pixel basis during the rendering process. In addition to conventional motion estimation methods, it is proposed to exploit the computer generated motion vectors to enhance the ratedistortion performance. To this end, a motion vector mapping method including disocclusion handling is presented. It is shown that mean rate savings of 3.78% can be achieved.
* 4 pages, 4 figures