 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeploying the NASA Valkyrie Humanoid for IED Response: An Initial Approach and Evaluation Summary
Oct 02, 2019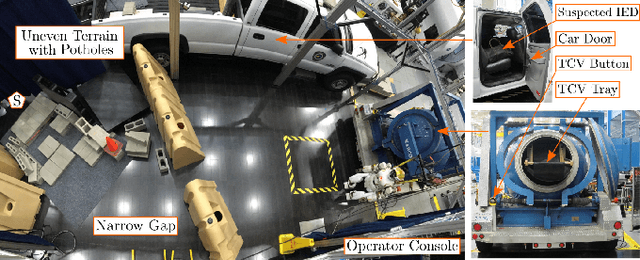
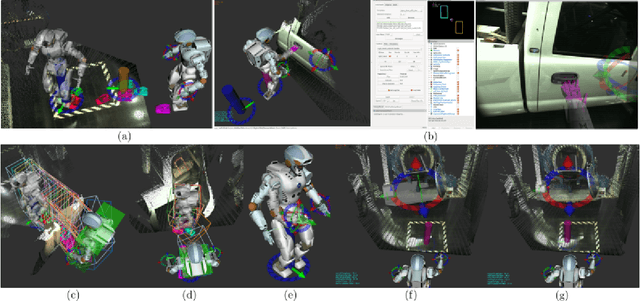
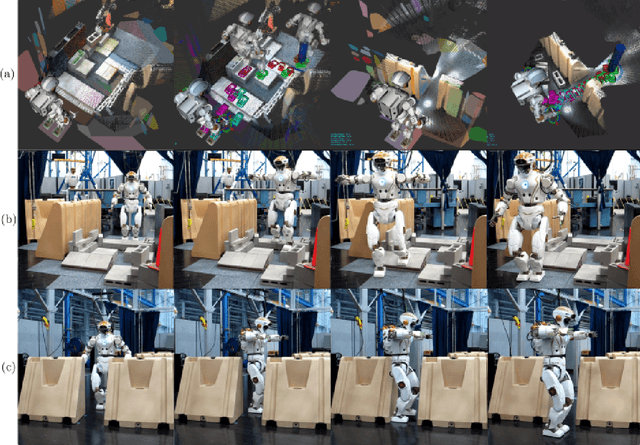
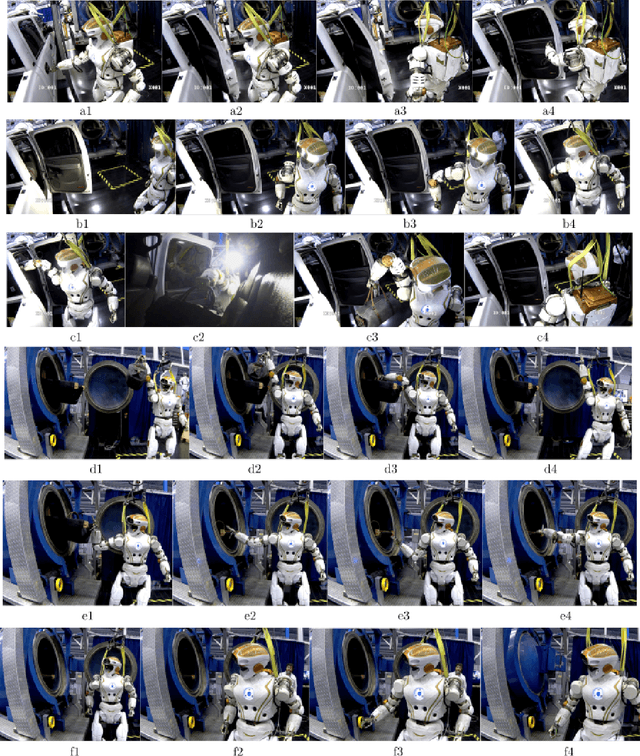
As part of a feasibility study, this paper shows the NASA Valkyrie humanoid robot performing an end-to-end improvised explosive device (IED) response task. To demonstrate and evaluate robot capabilities, sub-tasks highlight different locomotion, manipulation, and perception requirements: traversing uneven terrain, passing through a narrow passageway, opening a car door, retrieving a suspected IED, and securing the IED in a total containment vessel (TCV). For each sub-task, a description of the technical approach and the hidden challenges that were overcome during development are presented. The discussion of results, which explicitly includes existing limitations, is aimed at motivating continued research and development to enable practical deployment of humanoid robots for IED response. For instance, the data shows that operator pauses contribute to 50\% of the total completion time, which implies that further work is needed on user interfaces for increasing task completion efficiency.
Footstep Planning for Autonomous Walking Over Rough Terrain
Jul 19, 2019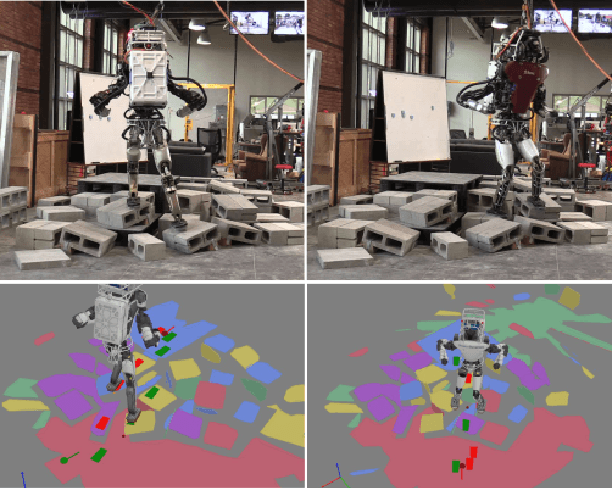
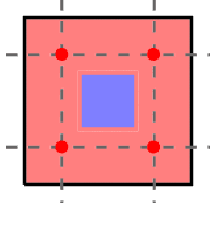
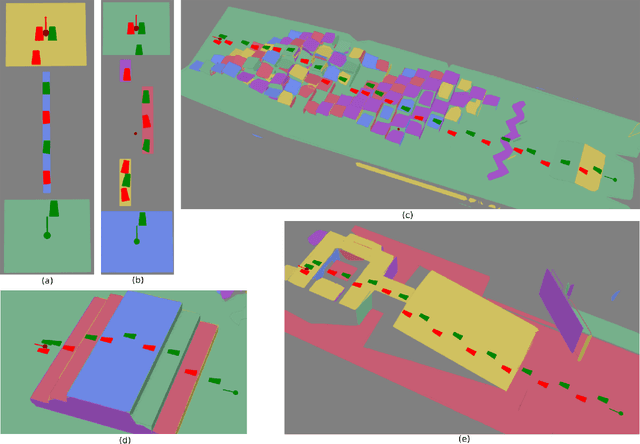
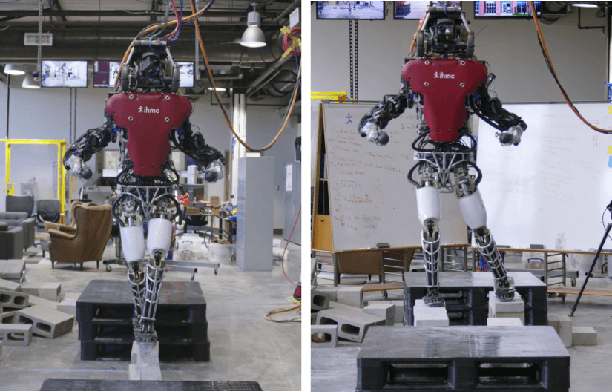
To increase the speed of operation and reduce operator burden, humanoid robots must be able to function autonomously, even in complex, cluttered environments. For this to be possible, they must be able to quickly and efficiently compute desired footsteps to reach a goal. In this work, we present a new A* footstep planner that utilizes a planar region representation of the environment enable footstep planning over rough terrain. To increase the number of available footholds, we present an approach to allow the use of partial footholds during the planning process. The footstep plan solutions are then post-processed to capture better solutions that lie between the lattice discretization of the footstep graph. We then demonstrate this planner over a variety of virtual and real world environments, including some that require partial footholds and rough terrain using the Atlas and Valkyrie humanoid robots.