 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFootstep Planning for Autonomous Walking Over Rough Terrain
Paper and Code
Jul 19, 2019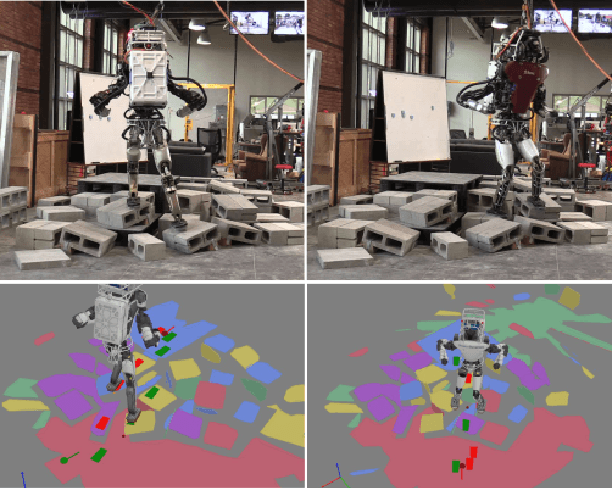
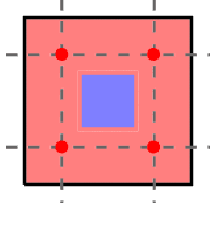
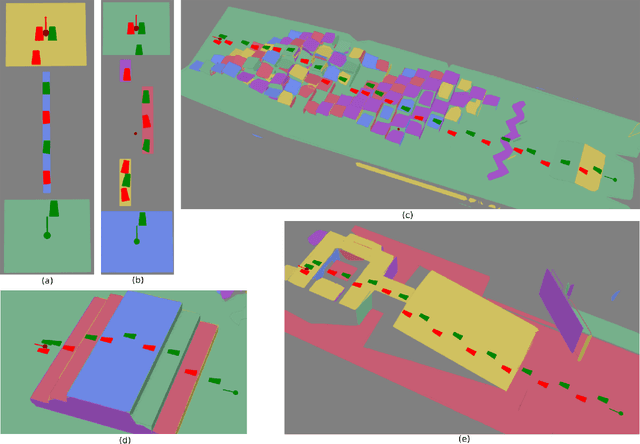
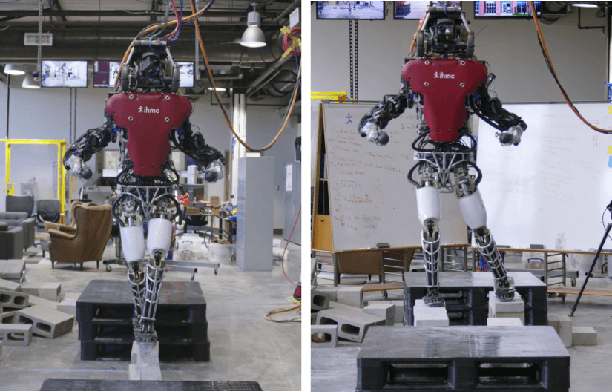
To increase the speed of operation and reduce operator burden, humanoid robots must be able to function autonomously, even in complex, cluttered environments. For this to be possible, they must be able to quickly and efficiently compute desired footsteps to reach a goal. In this work, we present a new A* footstep planner that utilizes a planar region representation of the environment enable footstep planning over rough terrain. To increase the number of available footholds, we present an approach to allow the use of partial footholds during the planning process. The footstep plan solutions are then post-processed to capture better solutions that lie between the lattice discretization of the footstep graph. We then demonstrate this planner over a variety of virtual and real world environments, including some that require partial footholds and rough terrain using the Atlas and Valkyrie humanoid robots.