 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffective Virtual Reality Teleoperation of an Upper-body Humanoid with Modified Task Jacobians and Relaxed Barrier Functions for Self-Collision Avoidance
Nov 12, 2024

We present an approach for retartgeting off-the-shelf Virtual Reality (VR) trackers to effectively teleoperate an upper-body humanoid while ensuring self-collision-free motions. Key to the effectiveness was the proper assignment of trackers to joint sets via modified task Jacobians and relaxed barrier functions for self-collision avoidance. The approach was validated on Apptronik's Astro hardware by demonstrating manipulation capabilities on a table-top environment with pick-and-place box packing and a two-handed box pick up and handover task.
The Robustness of Tether Friction in Non-idealized Terrains
Aug 22, 2022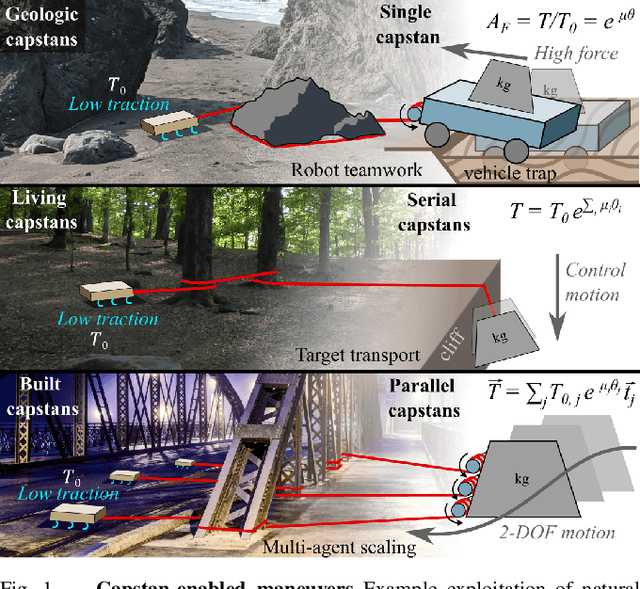
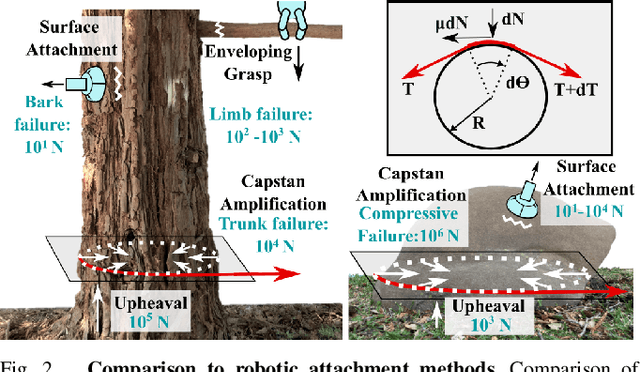
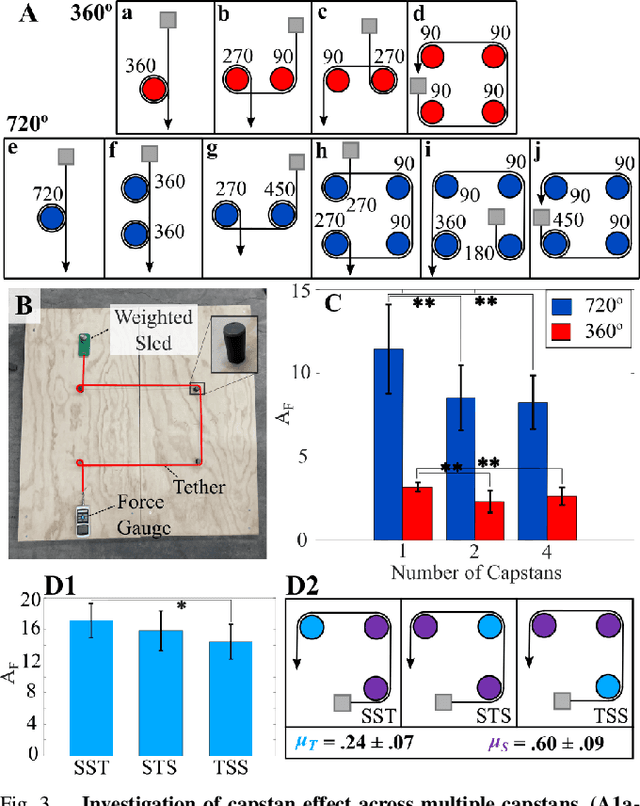
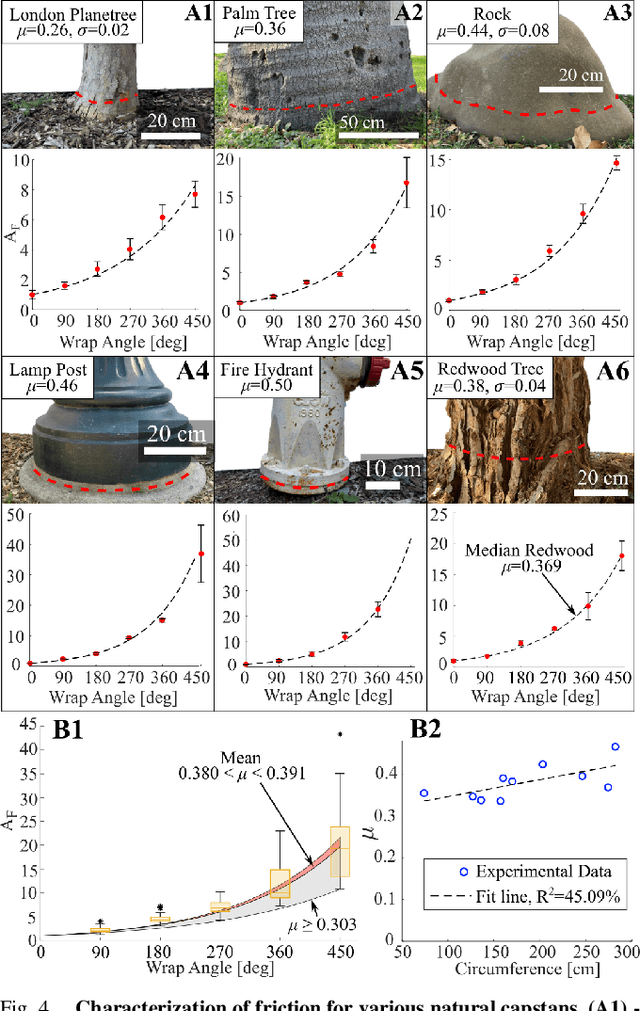
Reduced traction limits the ability of mobile robotic systems to resist or apply large external loads, such as tugging a massive payload. One simple and versatile solution is to wrap a tether around naturally occurring objects to leverage the capstan effect and create exponentially-amplified holding forces. Experiments show that an idealized capstan model explains force amplification experienced on common irregular outdoor objects - trees, rocks, posts. Robust to variable environmental conditions, this exponential amplification method can harness single or multiple capstan objects, either in series or in parallel with a team of robots. This adaptability allows for a range of potential configurations especially useful for when objects cannot be fully encircled or gripped. These principles are demonstrated with mobile platforms to (1) control the lowering and arrest of a payload, (2) to achieve planar control of a payload, and (3) to act as an anchor point for a more massive platform to winch towards. We show the simple addition of a tether, wrapped around shallow stones in sand, amplifies holding force of a low-traction platform by up to 774x.
Deploying the NASA Valkyrie Humanoid for IED Response: An Initial Approach and Evaluation Summary
Oct 02, 2019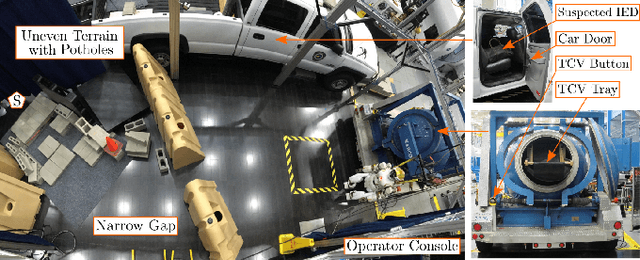
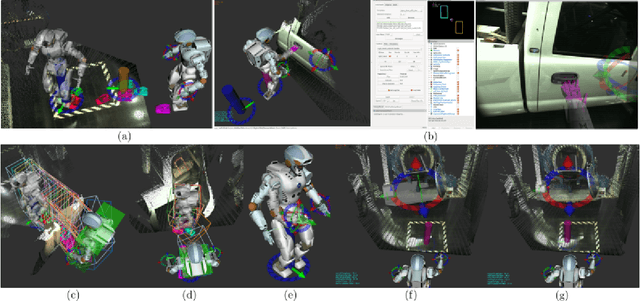
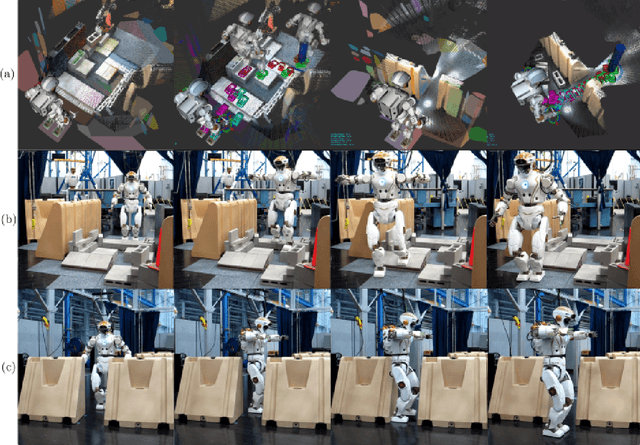
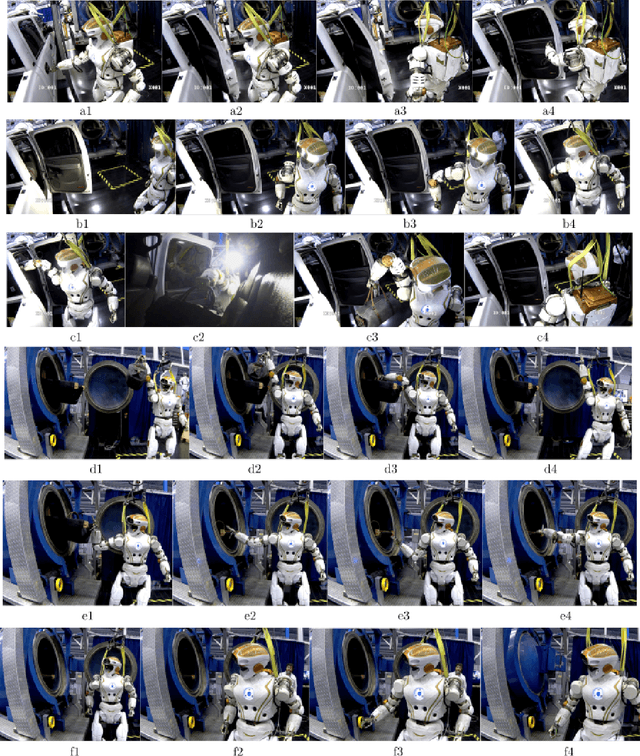
As part of a feasibility study, this paper shows the NASA Valkyrie humanoid robot performing an end-to-end improvised explosive device (IED) response task. To demonstrate and evaluate robot capabilities, sub-tasks highlight different locomotion, manipulation, and perception requirements: traversing uneven terrain, passing through a narrow passageway, opening a car door, retrieving a suspected IED, and securing the IED in a total containment vessel (TCV). For each sub-task, a description of the technical approach and the hidden challenges that were overcome during development are presented. The discussion of results, which explicitly includes existing limitations, is aimed at motivating continued research and development to enable practical deployment of humanoid robots for IED response. For instance, the data shows that operator pauses contribute to 50\% of the total completion time, which implies that further work is needed on user interfaces for increasing task completion efficiency.
Finding Locomanipulation Plans Quickly in the Locomotion Constrained Manifold
Sep 22, 2019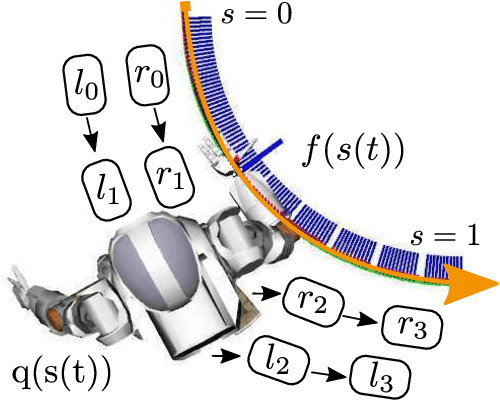
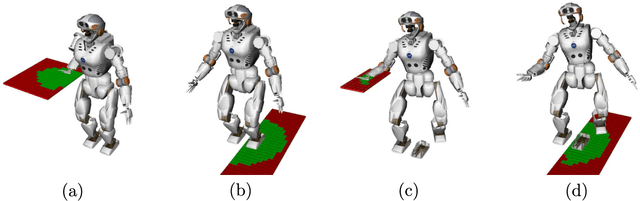
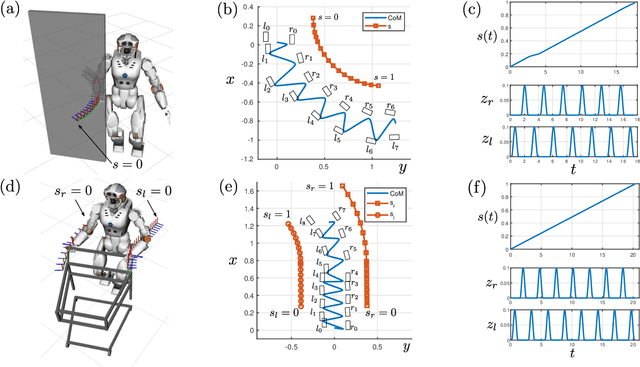
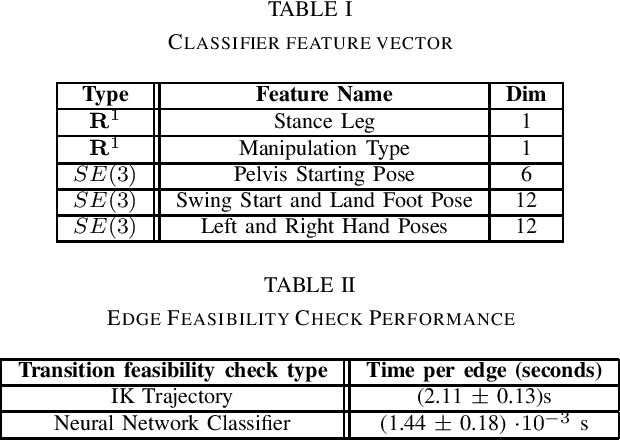
We present a method that finds locomanipulation plans that perform simultaneous locomotion and manipulation of objects for a desired end-effector trajectory. Key to our approach is to consider a generic locomotion constraint manifold that defines the locomotion scheme of the robot and then using this constraint manifold to search for admissible manipulation trajectories. The problem is formulated as a weighted-A* graph search whose planner output is a sequence of contact transitions and a path progression trajectory to construct the whole-body kinodynamic locomanipulation plan. We also provide a method for computing, visualizing and learning the locomanipulability region, which is used to efficiently evaluate the edge transition feasibility during the graph search. Experiments are performed on the NASA Valkyrie robot platform that utilizes a dynamic locomotion approach, called the divergent-component-of-motion (DCM), on two example locomanipulation scenarios.
Thermal Recovery of Multi-Limbed Robots with Electric Actuators
Feb 04, 2019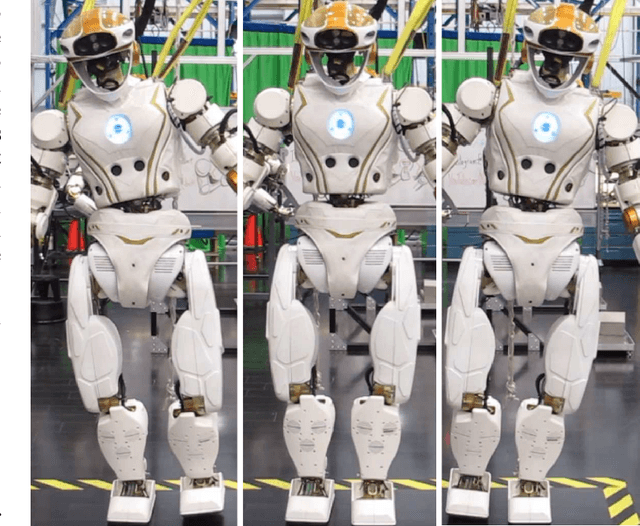
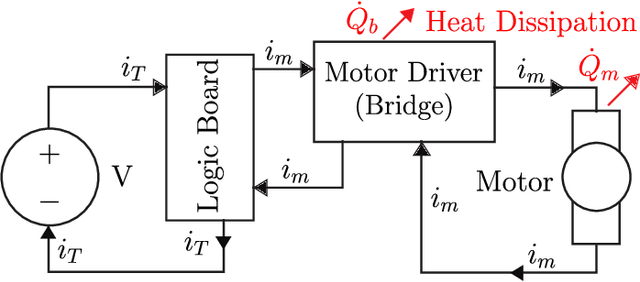

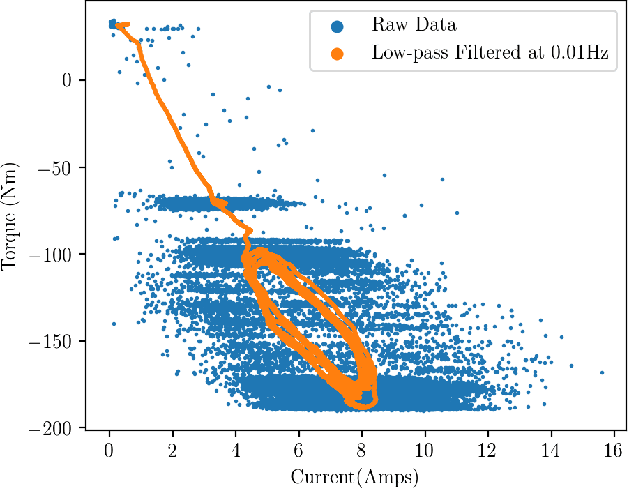
The problem of finding thermally minimizing configurations of a humanoid robot to recover its actuators from unsafe thermal states is addressed. A first-order, data-driven, effort-based, thermal model of the robot's actuators is devised, which is used to predict future thermal states. Given this predictive capability, a map between configurations and future temperatures is formulated to find what configurations, subject to valid contact constraints, can be taken now to minimize future thermal states. Effectively, this approach is a realization of a contact-constrained thermal inverse-kinematics (IK) process. Experimental validation of the proposed approach is performed on the NASA Valkyrie robot hardware.
Social Navigation Planning Based on People's Awareness of Robots
Sep 24, 2018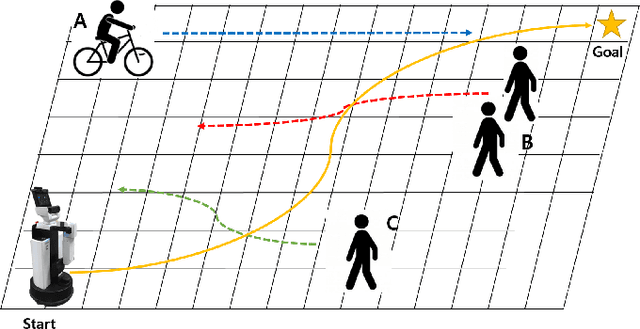

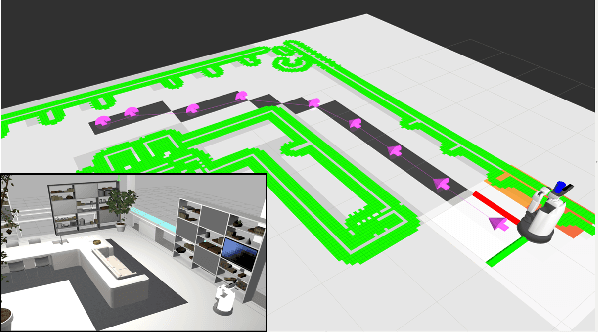
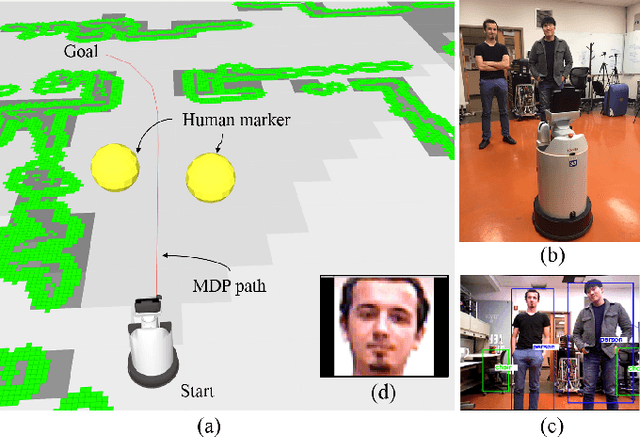
When mobile robots maneuver near people, they run the risk of rudely blocking their paths; but not all people behave the same around robots. People that have not noticed the robot are the most difficult to predict. This paper investigates how mobile robots can generate acceptable paths in dynamic environments by predicting human behavior. Here, human behavior may include both physical and mental behavior, we focus on the latter. We introduce a simple safe interaction model: when a human seems unaware of the robot, it should avoid going too close. In this study, people around robots are detected and tracked using sensor fusion and filtering techniques. To handle uncertainties in the dynamic environment, a Partially-Observable Markov Decision Process Model (POMDP) is used to formulate a navigation planning problem in the shared environment. People's awareness of robots is inferred and included as a state and reward model in the POMDP. The proposed planner enables a robot to change its navigation plan based on its perception of each person's robot-awareness. As far as we can tell, this is a new capability. We conduct simulation and experiments using the Toyota Human Support Robot (HSR) to validate our approach. We demonstrate that the proposed framework is capable of running in real-time.
Prioritized Kinematic Control of Joint-Constrained Head-Eye Robots using the Intermediate Value Approach
Sep 24, 2018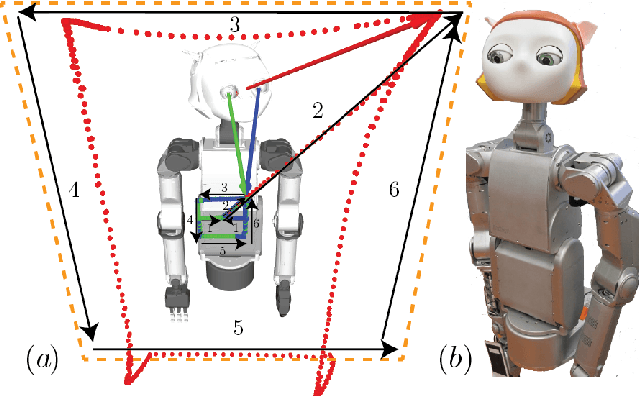
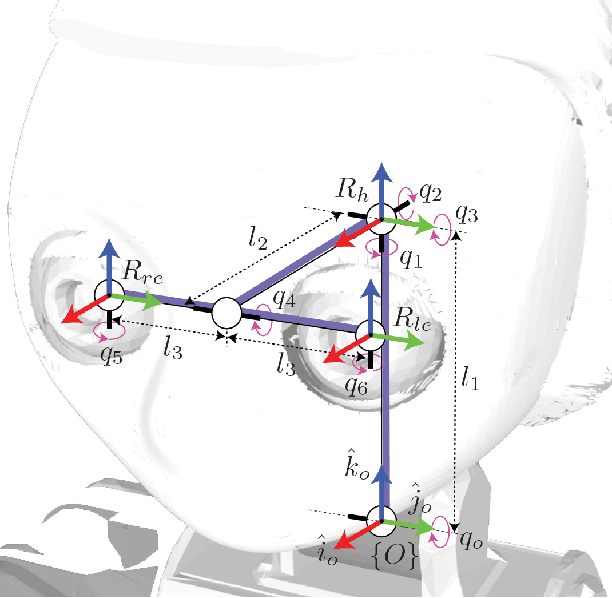
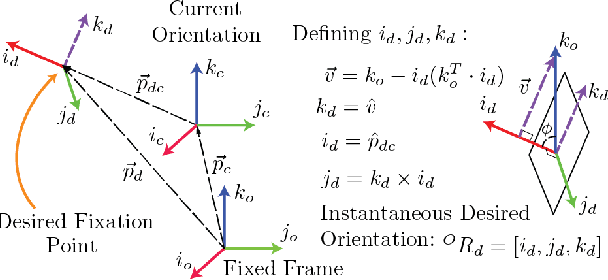
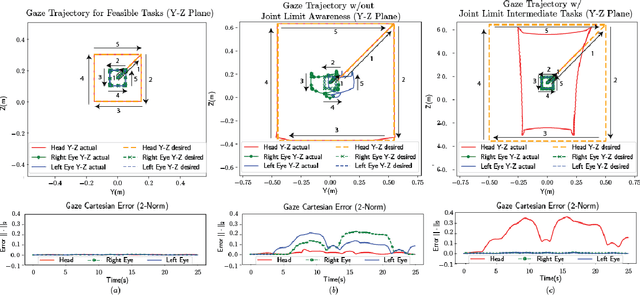
Existing gaze controllers for head-eye robots can only handle single fixation points. Here, a generic controller for head-eye robots capable of executing simultaneous and prioritized fixation trajectories in Cartesian space is presented. This enables the specification of multiple operational-space behaviors with priority such that the execution of a low priority head orientation task does not disturb the satisfaction of a higher prioritized eye gaze task. Through our approach, the head-eye robot inherently gains the biomimetic vestibulo-ocular reflex (VOR), which is the ability of gaze stabilization under self generated movements. The described controller utilizes recursive null space projections to encode joint limit constraints and task priorities. To handle the solution discontinuity that occurs when joint limit tasks are inserted or removed as a constraint, the Intermediate Desired Value (IDV) approach is applied. Experimental validation of the controller's properties is demonstrated with the Dreamer humanoid robot. Our contribution is on (1) the formulation of a desired gaze task as an operational space orientation task, (2) the application details of the IDV approach for the prioritized head-eye robot controller that can handle intermediate joint constraints, and (3) a minimum-jerk specification for behavior and trajectory generation in Cartesian space.
Exploring Model Predictive Control to Generate Optimal Control Policies for HRI Dynamical Systems
Jan 13, 2017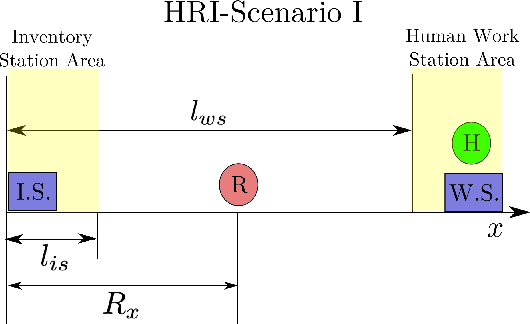
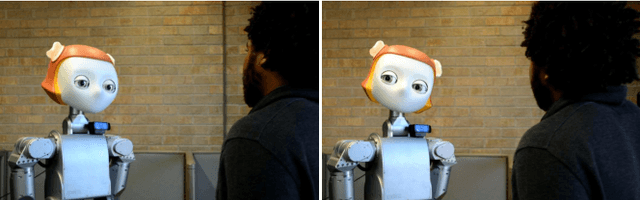
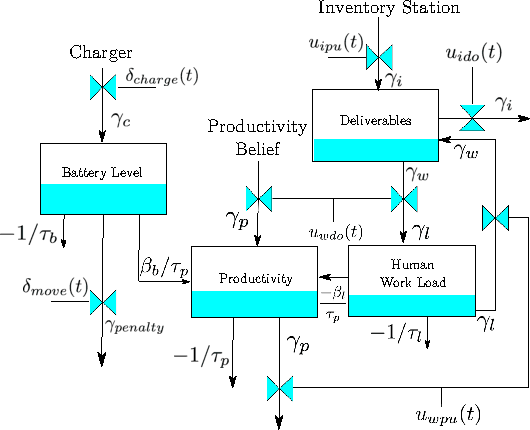
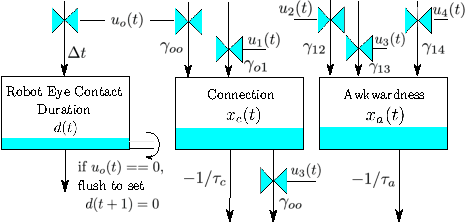
We model Human-Robot-Interaction (HRI) scenarios as linear dynamical systems and use Model Predictive Control (MPC) with mixed integer constraints to generate human-aware control policies. We motivate the approach by presenting two scenarios. The first involves an assistive robot that aims to maximize productivity while minimizing the human's workload, and the second involves a listening humanoid robot that manages its eye contact behavior to maximize "connection" and minimize social "awkwardness" with the human during the interaction. Our simulation results show that the robot generates useful behaviors as it finds control policies to minimize the specified cost function. Further, we implement the second scenario on a humanoid robot and test the eye contact scenario with 48 human participants to demonstrate and evaluate the desired controller behavior. The humanoid generated 25% more eye contact when it was told to maximize connection over when it was told to maximize awkwardness. However, despite showing the desired behavior, there was no statistical difference between the participant's perceived connection with the humanoid.