Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThermal Recovery of Multi-Limbed Robots with Electric Actuators
Feb 04, 2019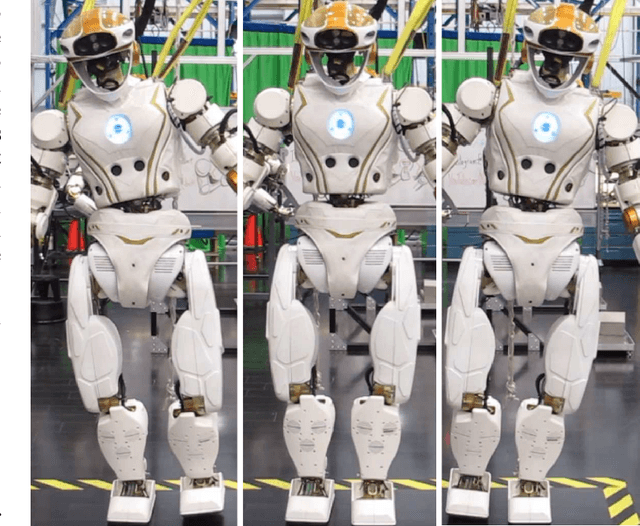
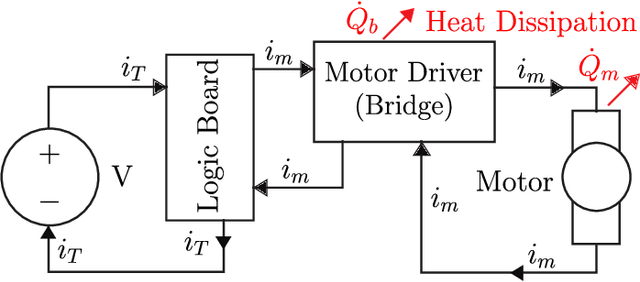

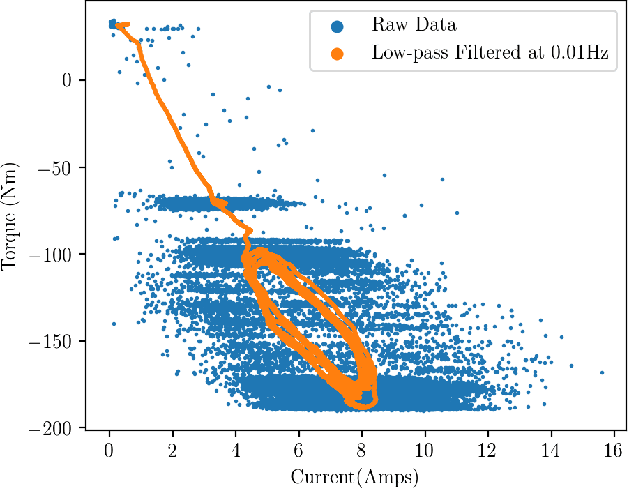
The problem of finding thermally minimizing configurations of a humanoid robot to recover its actuators from unsafe thermal states is addressed. A first-order, data-driven, effort-based, thermal model of the robot's actuators is devised, which is used to predict future thermal states. Given this predictive capability, a map between configurations and future temperatures is formulated to find what configurations, subject to valid contact constraints, can be taken now to minimize future thermal states. Effectively, this approach is a realization of a contact-constrained thermal inverse-kinematics (IK) process. Experimental validation of the proposed approach is performed on the NASA Valkyrie robot hardware.
* 8 pages, 7 figures, Published to IEEE Robotics and Automation Letters
on January 18, 2019
Via