 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeploying the NASA Valkyrie Humanoid for IED Response: An Initial Approach and Evaluation Summary
Oct 02, 2019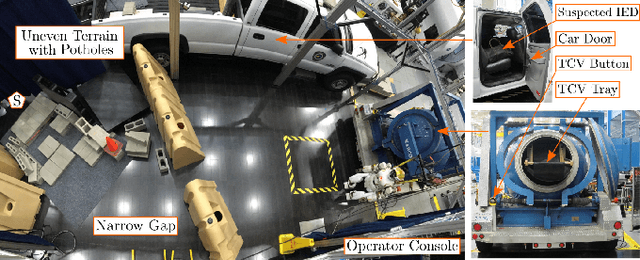
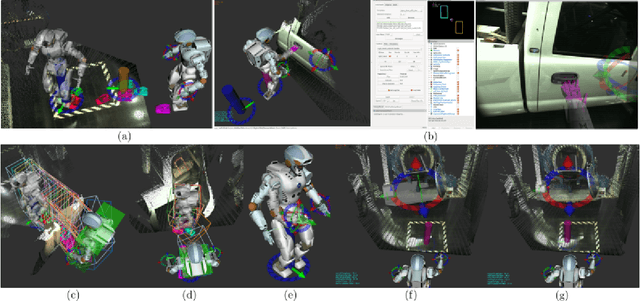
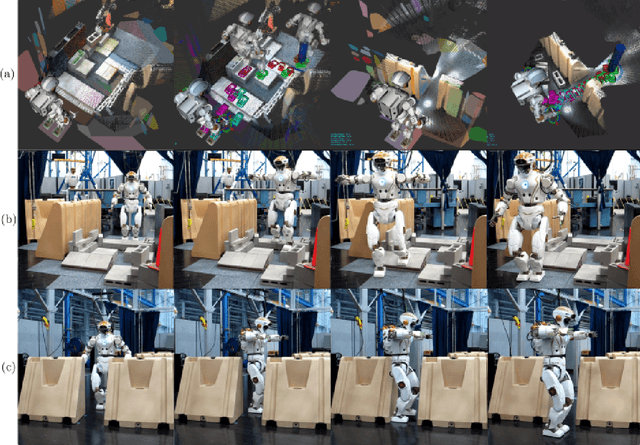
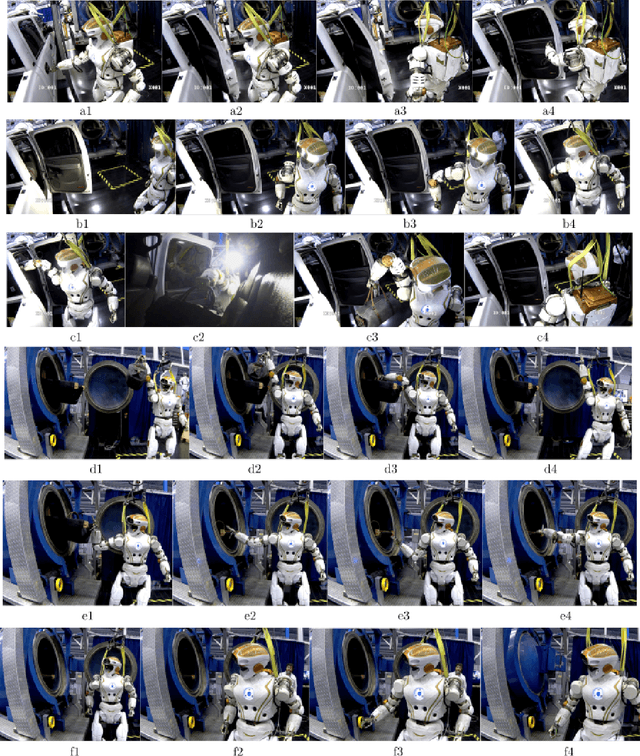
As part of a feasibility study, this paper shows the NASA Valkyrie humanoid robot performing an end-to-end improvised explosive device (IED) response task. To demonstrate and evaluate robot capabilities, sub-tasks highlight different locomotion, manipulation, and perception requirements: traversing uneven terrain, passing through a narrow passageway, opening a car door, retrieving a suspected IED, and securing the IED in a total containment vessel (TCV). For each sub-task, a description of the technical approach and the hidden challenges that were overcome during development are presented. The discussion of results, which explicitly includes existing limitations, is aimed at motivating continued research and development to enable practical deployment of humanoid robots for IED response. For instance, the data shows that operator pauses contribute to 50\% of the total completion time, which implies that further work is needed on user interfaces for increasing task completion efficiency.
Thermal Recovery of Multi-Limbed Robots with Electric Actuators
Feb 04, 2019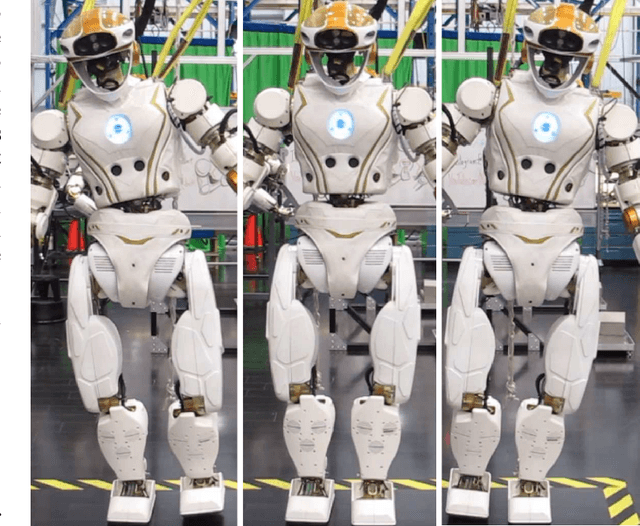
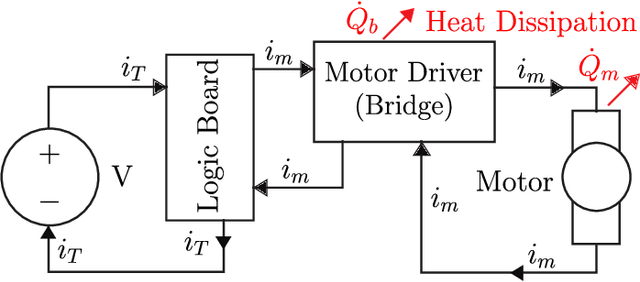

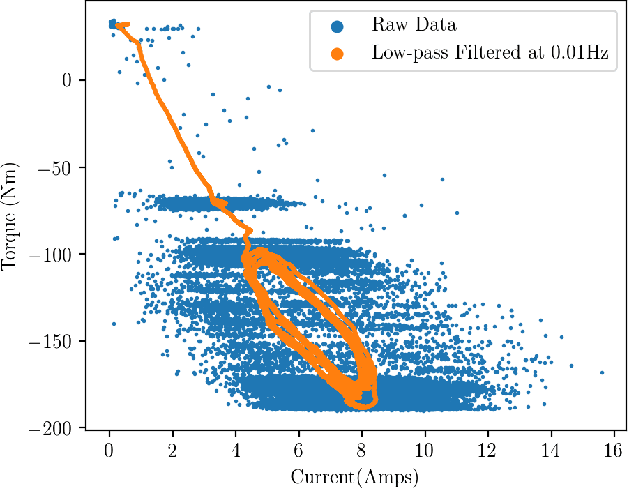
The problem of finding thermally minimizing configurations of a humanoid robot to recover its actuators from unsafe thermal states is addressed. A first-order, data-driven, effort-based, thermal model of the robot's actuators is devised, which is used to predict future thermal states. Given this predictive capability, a map between configurations and future temperatures is formulated to find what configurations, subject to valid contact constraints, can be taken now to minimize future thermal states. Effectively, this approach is a realization of a contact-constrained thermal inverse-kinematics (IK) process. Experimental validation of the proposed approach is performed on the NASA Valkyrie robot hardware.