 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-critical Locomotion of Biped Robots in Infeasible Paths: Overcoming Obstacles during Navigation toward Destination
Sep 16, 2024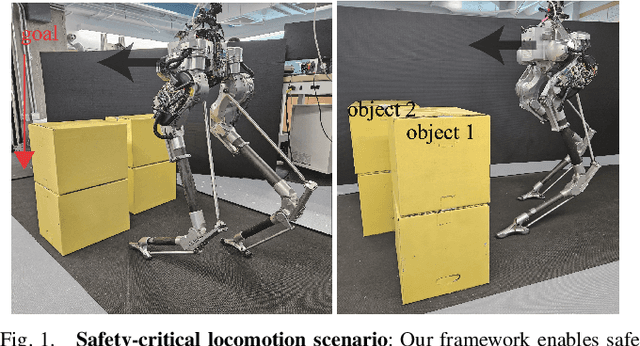
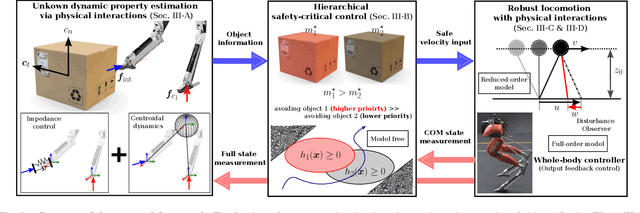
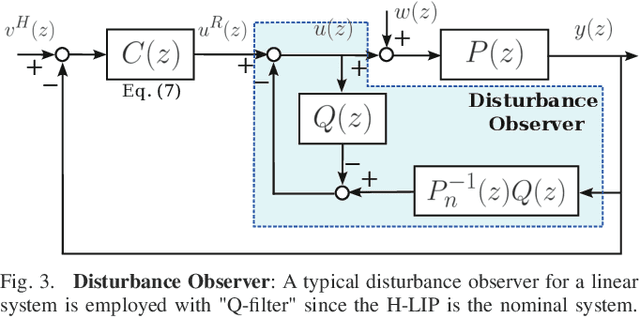
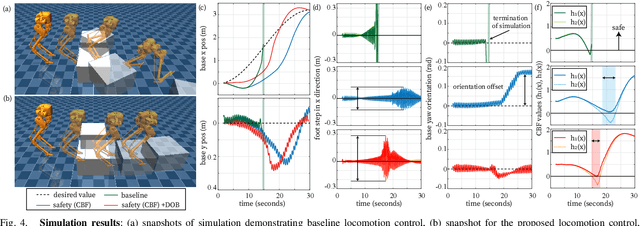
This paper proposes a safety-critical locomotion control framework employed for legged robots exploring through infeasible path in obstacle-rich environments. Our research focus is on achieving safe and robust locomotion where robots confront unavoidable obstacles en route to their designated destination. Through the utilization of outcomes from physical interactions with unknown objects, we establish a hierarchy among the safety-critical conditions avoiding the obstacles. This hierarchy enables the generation of a safe reference trajectory that adeptly mitigates conflicts among safety conditions and reduce the risk while controlling the robot toward its destination without additional motion planning methods. In addition, robust bipedal locomotion is achieved by utilizing the Hybrid Linear Inverted Pendulum model, coupled with a disturbance observer addressing a disturbance from the physical interaction.
Variable Inertia Model Predictive Control for Fast Bipedal Maneuvers
Jul 23, 2024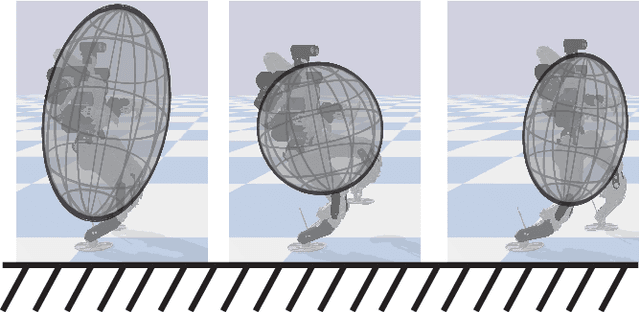
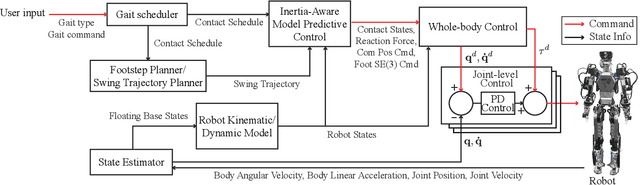
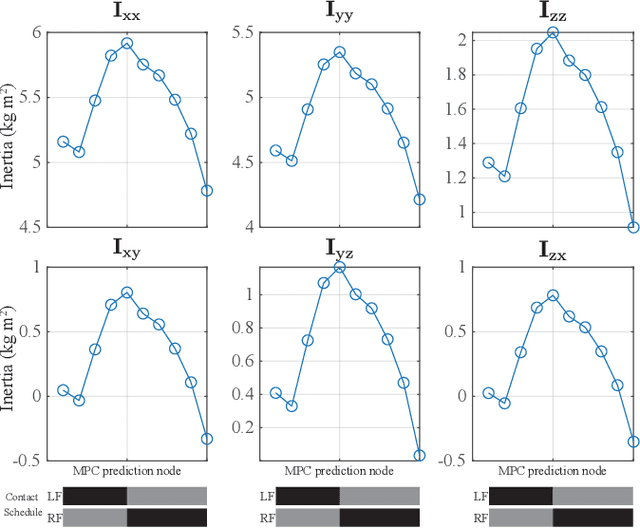
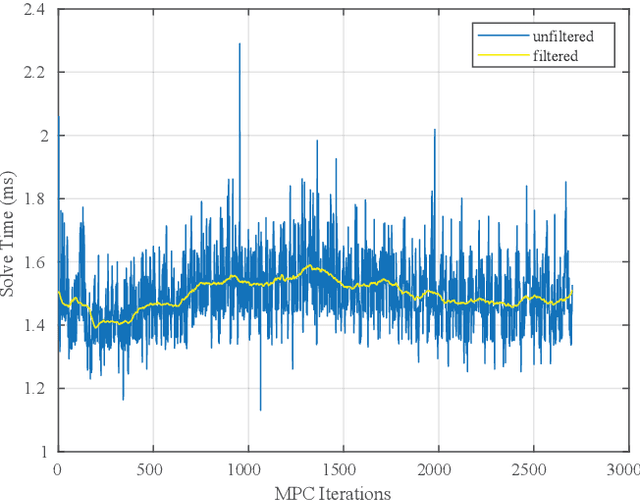
This paper proposes a novel control framework for agile and robust bipedal locomotion, addressing model discrepancies between full-body and reduced-order models. Specifically, assumptions such as constant centroidal inertia have introduced significant challenges and limitations in locomotion tasks. To enhance the agility and versatility of full-body humanoid robots, we formalize a Model Predictive Control (MPC) problem that accounts for the variable centroidal inertia of humanoid robots within a convex optimization framework, ensuring computational efficiency for real-time operations. In this formulation, we incorporate a centroidal inertia network designed to predict the variable centroidal inertia over the MPC horizon, taking into account the swing foot trajectories-an aspect often overlooked in ROM-based MPC frameworks. Moreover, we enhance the performance and stability of locomotion behaviors by synergizing the MPC-based approach with whole-body control (WBC). The effectiveness of our proposed framework is validated through simulations using our full-body humanoid robot, DRACO 3, demonstrating dynamic behaviors.
Safety-critical Autonomous Inspection of Distillation Columns using Quadrupedal Robots Equipped with Roller Arms
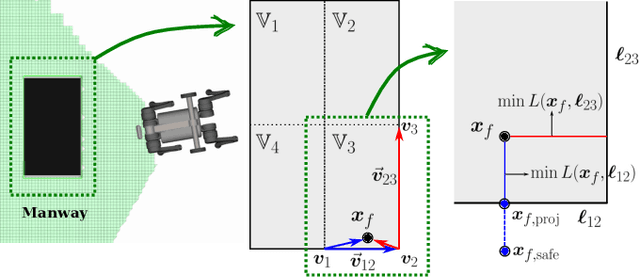
Apr 16, 2024This paper proposes a comprehensive framework designed for the autonomous inspection of complex environments, with a specific focus on multi-tiered settings such as distillation column trays. Leveraging quadruped robots equipped with roller arms, and through the use of onboard perception, we integrate essential motion components including: locomotion, safe and dynamic transitions between trays, and intermediate motions that bridge a variety of motion primitives. Given the slippery and confined nature of column trays, it is critical to ensure safety of the robot during inspection, therefore we employ a safety filter and footstep re-planning based upon control barrier function representations of the environment. Our framework integrates all system components into a state machine encoding the developed safety-critical planning and control elements to guarantee safety-critical autonomy, enabling autonomous and safe navigation and inspection of distillation columns. Experimental validation in an environment, consisting of industrial-grade chemical distillation trays, highlights the effectiveness of our multi-layered architecture.
Safety-Critical Coordination of Legged Robots via Layered Controllers and Forward Reachable Set based Control Barrier Functions
Dec 14, 2023This paper presents a safety-critical approach to the coordination of robots in dynamic environments. To this end, we leverage control barrier functions (CBFs) with the forward reachable set to guarantee the safe coordination of the robots while preserving a desired trajectory via a layered controller. The top-level planner generates a safety-ensured trajectory for each agent, accounting for the dynamic constraints in the environment. This planner leverages high-order CBFs based on the forward reachable set to ensure safety-critical coordination control, i.e., guarantee the safe coordination of the robots during locomotion. The middle-level trajectory planner employs single rigid body (SRB) dynamics to generate optimal ground reaction forces (GRFs) to track the safety-ensured trajectories from the top-level planner. The whole-body motions to adhere to the optimal GRFs while ensuring the friction cone condition at the end of each stance leg are generated from the low-level controller. The effectiveness of the approach is demonstrated through simulation and hardware experiments.
Safety-critical Control of Quadrupedal Robots with Rolling Arms for Autonomous Inspection of Complex Environments
Dec 12, 2023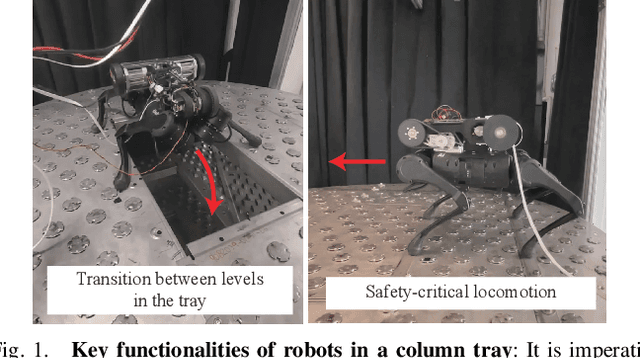
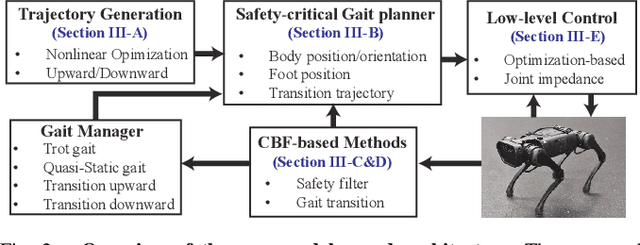
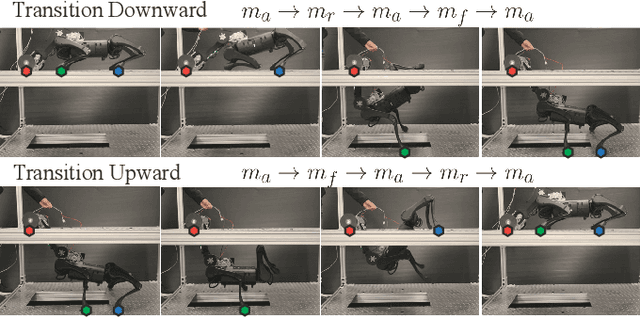
This paper presents a safety-critical control framework tailored for quadruped robots equipped with a roller arm, particularly when performing locomotive tasks such as autonomous robotic inspection in complex, multi-tiered environments. In this study, we consider the problem of operating a quadrupedal robot in distillation columns, locomoting on column trays and transitioning between these trays with a roller arm. To address this problem, our framework encompasses the following key elements: 1) Trajectory generation for seamless transitions between columns, 2) Foothold re-planning in regions deemed unsafe, 3) Safety-critical control incorporating control barrier functions, 4) Gait transitions based on safety levels, and 5) A low-level controller. Our comprehensive framework, comprising these components, enables autonomous and safe locomotion across multiple layers. We incorporate reduced-order and full-body models to ensure safety, integrating safety-critical control and footstep re-planning approaches. We validate the effectiveness of our proposed framework through practical experiments involving a quadruped robot equipped with a roller arm, successfully navigating and transitioning between different levels within the column tray structure.
A Data-driven Method for Safety-critical Control: Designing Control Barrier Functions from State Constraints
Dec 12, 2023This paper addresses the challenge of integrating explicit hard constraints into the control barrier function (CBF) framework for ensuring safety in autonomous systems, including robots. We propose a novel data-driven method to derive CBFs from these hard constraints in practical scenarios. Our approach assumes that the forward invariant safe set is either a subset or equal to the constrained set. The process consists of two main steps. First, we randomly sample states within the constraint boundaries and identify inputs meeting the time derivative criteria of the hard constraint; this iterative process converges using the Jaccard index. Next, we formulate CBFs that enclose the safe set using the sampled boundaries. This enables the creation of a control-invariant safe set, approaching the maximum attainable level of control invariance. This approach, therefore, addresses the complexities posed by complex autonomous systems with constrained control input spaces, culminating in a control-invariant safe set that closely approximates the maximal control invariant set.
A Multi-In-Single-Out Network for Video Frame Interpolation without Optical Flow
Dec 05, 2023In general, deep learning-based video frame interpolation (VFI) methods have predominantly focused on estimating motion vectors between two input frames and warping them to the target time. While this approach has shown impressive performance for linear motion between two input frames, it exhibits limitations when dealing with occlusions and nonlinear movements. Recently, generative models have been applied to VFI to address these issues. However, as VFI is not a task focused on generating plausible images, but rather on predicting accurate intermediate frames between two given frames, performance limitations still persist. In this paper, we propose a multi-in-single-out (MISO) based VFI method that does not rely on motion vector estimation, allowing it to effectively model occlusions and nonlinear motion. Additionally, we introduce a novel motion perceptual loss that enables MISO-VFI to better capture the spatio-temporal correlations within the video frames. Our MISO-VFI method achieves state-of-the-art results on VFI benchmarks Vimeo90K, Middlebury, and UCF101, with a significant performance gap compared to existing approaches.
Multi-Domain Walking with Reduced-Order Models of Locomotion
Oct 04, 2023Drawing inspiration from human multi-domain walking, this work presents a novel reduced-order model based framework for realizing multi-domain robotic walking. At the core of our approach is the viewpoint that human walking can be represented by a hybrid dynamical system, with continuous phases that are fully-actuated, under-actuated, and over-actuated and discrete changes in actuation type occurring with changes in contact. Leveraging this perspective, we synthesize a multi-domain linear inverted pendulum (MLIP) model of locomotion. Utilizing the step-to-step dynamics of the MLIP model, we successfully demonstrate multi-domain walking behaviors on the bipedal robot Cassie -- a high degree of freedom 3D bipedal robot. Thus, we show the ability to bridge the gap between multi-domain reduced order models and full-order multi-contact locomotion. Additionally, our results showcase the ability of the proposed method to achieve versatile speed-tracking performance and robust push recovery behaviors.
Hierarchical Relaxation of Safety-critical Controllers: Mitigating Contradictory Safety Conditions with Application to Quadruped Robots
May 06, 2023

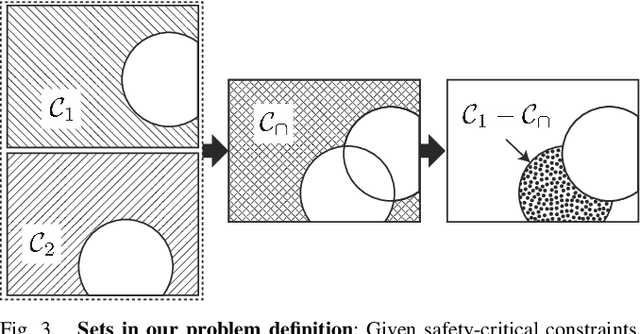
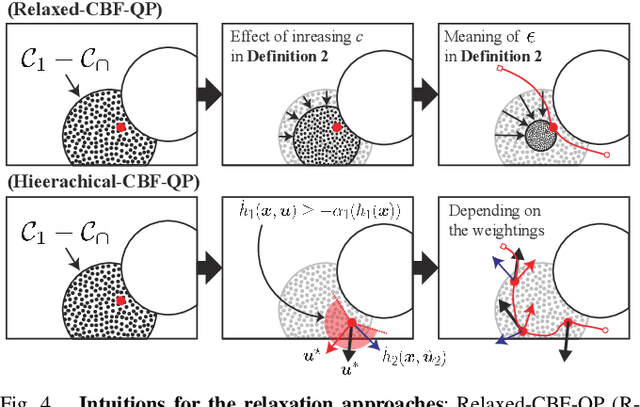
The safety-critical control of robotic systems often must account for multiple, potentially conflicting, safety constraints. This paper proposes novel relaxation techniques to address safety-critical control problems in the presence of conflicting safety conditions. In particular, Control Barrier Function (CBFs) provide a means to encode safety as constraints in a Quadratic Program (QP), wherein multiple safety conditions yield multiple constraints. However, the QP problem becomes infeasible when the safety conditions cannot be simultaneously satisfied. To resolve this potential infeasibility, we introduce a hierarchy between the safety conditions and employ an additional variable to relax the less important safety conditions (Relaxed-CBF-QP), and formulate a cascaded structure to achieve smaller violations of lower-priority safety conditions (Hierarchical-CBF-QP). The proposed approach, therefore, ensures the existence of at least one solution to the QP problem with the CBFs while dynamically balancing enforcement of additional safety constraints. Importantly, this paper evaluates the impact of different weighting factors in the Hierarchical-CBF-QP and, due to the sensitivity of these weightings in the observed behavior, proposes a method to determine the weighting factors via a sampling-based technique. The validity of the proposed approach is demonstrated through simulations and experiments on a quadrupedal robot navigating to a goal through regions with different levels of danger.
Safety-Critical Coordination for Cooperative Legged Locomotion via Control Barrier Functions
Mar 23, 2023



This paper presents a safety-critical approach to the coordinated control of cooperative robots locomoting in the presence of fixed (holonomic) constraints. To this end, we leverage control barrier functions (CBFs) to ensure the safe cooperation of the robots while maintaining a desired formation and avoiding obstacles. The top-level planner generates a set of feasible trajectories, accounting for both kinematic constraints between the robots and physical constraints of the environment. This planner leverages CBFs to ensure safety-critical coordination control, i.e., guarantee safety of the collaborative robots during locomotion. The middle-level trajectory planner incorporates interconnected single rigid body (SRB) dynamics to generate optimal ground reaction forces (GRFs) to track the safety-ensured trajectories from the top-level planner while addressing the interconnection dynamics between agents. Distributed low-level controllers generate whole-body motion to follow the prescribed optimal GRFs while ensuring the friction cone condition at each end of the stance legs. The effectiveness of the approach is demonstrated through numerical simulations and experimentally on a pair of quadrupedal robots.