 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-critical Control of Quadrupedal Robots with Rolling Arms for Autonomous Inspection of Complex Environments
Paper and Code
Dec 12, 2023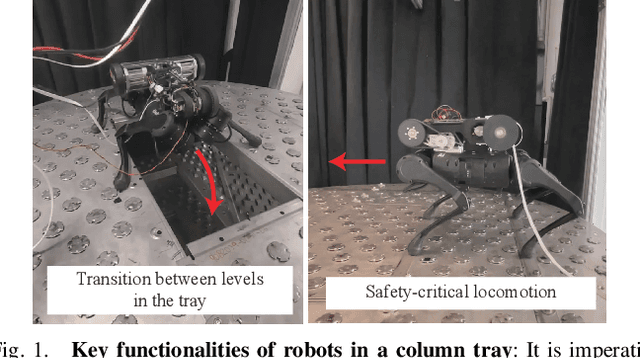
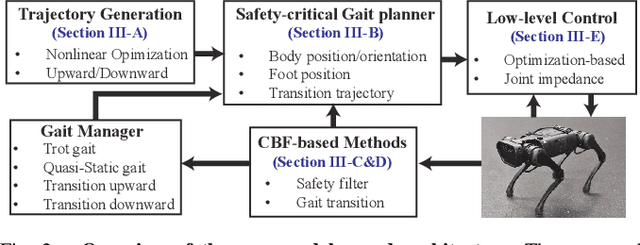
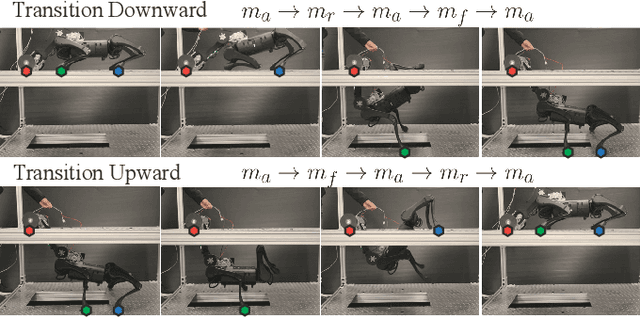
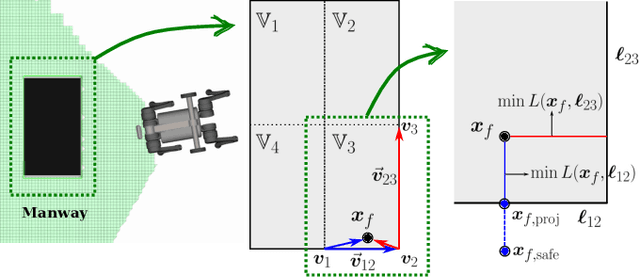
This paper presents a safety-critical control framework tailored for quadruped robots equipped with a roller arm, particularly when performing locomotive tasks such as autonomous robotic inspection in complex, multi-tiered environments. In this study, we consider the problem of operating a quadrupedal robot in distillation columns, locomoting on column trays and transitioning between these trays with a roller arm. To address this problem, our framework encompasses the following key elements: 1) Trajectory generation for seamless transitions between columns, 2) Foothold re-planning in regions deemed unsafe, 3) Safety-critical control incorporating control barrier functions, 4) Gait transitions based on safety levels, and 5) A low-level controller. Our comprehensive framework, comprising these components, enables autonomous and safe locomotion across multiple layers. We incorporate reduced-order and full-body models to ensure safety, integrating safety-critical control and footstep re-planning approaches. We validate the effectiveness of our proposed framework through practical experiments involving a quadruped robot equipped with a roller arm, successfully navigating and transitioning between different levels within the column tray structure.