 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWalk the PLANC: Physics-Guided RL for Agile Humanoid Locomotion on Constrained Footholds
Jan 09, 2026Bipedal humanoid robots must precisely coordinate balance, timing, and contact decisions when locomoting on constrained footholds such as stepping stones, beams, and planks -- even minor errors can lead to catastrophic failure. Classical optimization and control pipelines handle these constraints well but depend on highly accurate mathematical representations of terrain geometry, making them prone to error when perception is noisy or incomplete. Meanwhile, reinforcement learning has shown strong resilience to disturbances and modeling errors, yet end-to-end policies rarely discover the precise foothold placement and step sequencing required for discontinuous terrain. These contrasting limitations motivate approaches that guide learning with physics-based structure rather than relying purely on reward shaping. In this work, we introduce a locomotion framework in which a reduced-order stepping planner supplies dynamically consistent motion targets that steer the RL training process via Control Lyapunov Function (CLF) rewards. This combination of structured footstep planning and data-driven adaptation produces accurate, agile, and hardware-validated stepping-stone locomotion on a humanoid robot, substantially improving reliability compared to conventional model-free reinforcement-learning baselines.
Robust Push Recovery on Bipedal Robots: Leveraging Multi-Domain Hybrid Systems with Reduced-Order Model Predictive Control
Apr 25, 2025In this paper, we present a novel control framework to achieve robust push recovery on bipedal robots while locomoting. The key contribution is the unification of hybrid system models of locomotion with a reduced-order model predictive controller determining: foot placement, step timing, and ankle control. The proposed reduced-order model is an augmented Linear Inverted Pendulum model with zero moment point coordinates; this is integrated within a model predictive control framework for robust stabilization under external disturbances. By explicitly leveraging the hybrid dynamics of locomotion, our approach significantly improves stability and robustness across varying walking heights, speeds, step durations, and is effective for both flat-footed and more complex multi-domain heel-to-toe walking patterns. The framework is validated with high-fidelity simulation on Cassie, a 3D underactuated robot, showcasing real-time feasibility and substantially improved stability. The results demonstrate the robustness of the proposed method in dynamic environments.
Safety-critical Locomotion of Biped Robots in Infeasible Paths: Overcoming Obstacles during Navigation toward Destination
Sep 16, 2024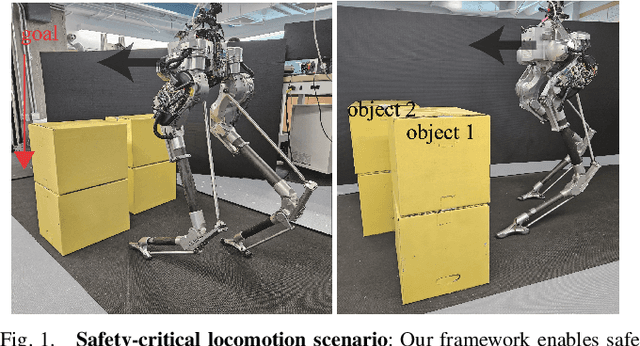
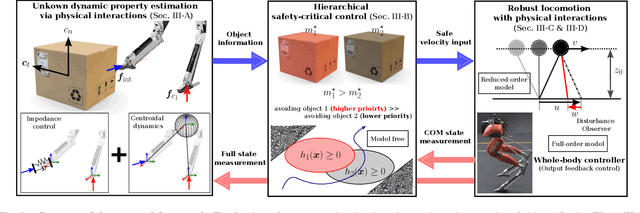
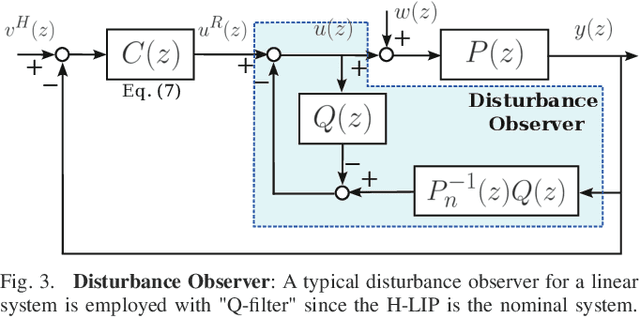
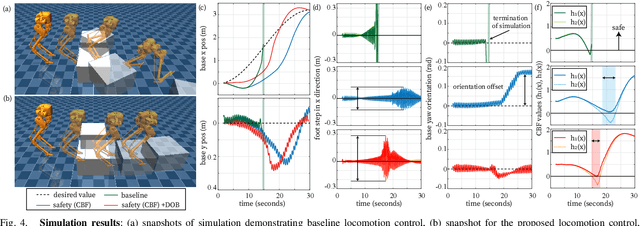
This paper proposes a safety-critical locomotion control framework employed for legged robots exploring through infeasible path in obstacle-rich environments. Our research focus is on achieving safe and robust locomotion where robots confront unavoidable obstacles en route to their designated destination. Through the utilization of outcomes from physical interactions with unknown objects, we establish a hierarchy among the safety-critical conditions avoiding the obstacles. This hierarchy enables the generation of a safe reference trajectory that adeptly mitigates conflicts among safety conditions and reduce the risk while controlling the robot toward its destination without additional motion planning methods. In addition, robust bipedal locomotion is achieved by utilizing the Hybrid Linear Inverted Pendulum model, coupled with a disturbance observer addressing a disturbance from the physical interaction.
Learning Merton's Strategies in an Incomplete Market: Recursive Entropy Regularization and Biased Gaussian Exploration
Dec 19, 2023We study Merton's expected utility maximization problem in an incomplete market, characterized by a factor process in addition to the stock price process, where all the model primitives are unknown. We take the reinforcement learning (RL) approach to learn optimal portfolio policies directly by exploring the unknown market, without attempting to estimate the model parameters. Based on the entropy-regularization framework for general continuous-time RL formulated in Wang et al. (2020), we propose a recursive weighting scheme on exploration that endogenously discounts the current exploration reward by the past accumulative amount of exploration. Such a recursive regularization restores the optimality of Gaussian exploration. However, contrary to the existing results, the optimal Gaussian policy turns out to be biased in general, due to the interwinding needs for hedging and for exploration. We present an asymptotic analysis of the resulting errors to show how the level of exploration affects the learned policies. Furthermore, we establish a policy improvement theorem and design several RL algorithms to learn Merton's optimal strategies. At last, we carry out both simulation and empirical studies with a stochastic volatility environment to demonstrate the efficiency and robustness of the RL algorithms in comparison to the conventional plug-in method.
Multi-Domain Walking with Reduced-Order Models of Locomotion
Oct 04, 2023Drawing inspiration from human multi-domain walking, this work presents a novel reduced-order model based framework for realizing multi-domain robotic walking. At the core of our approach is the viewpoint that human walking can be represented by a hybrid dynamical system, with continuous phases that are fully-actuated, under-actuated, and over-actuated and discrete changes in actuation type occurring with changes in contact. Leveraging this perspective, we synthesize a multi-domain linear inverted pendulum (MLIP) model of locomotion. Utilizing the step-to-step dynamics of the MLIP model, we successfully demonstrate multi-domain walking behaviors on the bipedal robot Cassie -- a high degree of freedom 3D bipedal robot. Thus, we show the ability to bridge the gap between multi-domain reduced order models and full-order multi-contact locomotion. Additionally, our results showcase the ability of the proposed method to achieve versatile speed-tracking performance and robust push recovery behaviors.
A Fast Fourier Convolutional Deep Neural Network For Accurate and Explainable Discrimination Of Wheat Yellow Rust And Nitrogen Deficiency From Sentinel-2 Time-Series Data
Jun 29, 2023Accurate and timely detection of plant stress is essential for yield protection, allowing better-targeted intervention strategies. Recent advances in remote sensing and deep learning have shown great potential for rapid non-invasive detection of plant stress in a fully automated and reproducible manner. However, the existing models always face several challenges: 1) computational inefficiency and the misclassifications between the different stresses with similar symptoms; and 2) the poor interpretability of the host-stress interaction. In this work, we propose a novel fast Fourier Convolutional Neural Network (FFDNN) for accurate and explainable detection of two plant stresses with similar symptoms (i.e. Wheat Yellow Rust And Nitrogen Deficiency). Specifically, unlike the existing CNN models, the main components of the proposed model include: 1) a fast Fourier convolutional block, a newly fast Fourier transformation kernel as the basic perception unit, to substitute the traditional convolutional kernel to capture both local and global responses to plant stress in various time-scale and improve computing efficiency with reduced learning parameters in Fourier domain; 2) Capsule Feature Encoder to encapsulate the extracted features into a series of vector features to represent part-to-whole relationship with the hierarchical structure of the host-stress interactions of the specific stress. In addition, in order to alleviate over-fitting, a photochemical vegetation indices-based filter is placed as pre-processing operator to remove the non-photochemical noises from the input Sentinel-2 time series.
Meta contrastive label correction for financial time series
Mar 09, 2023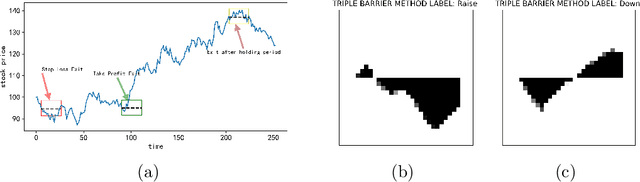
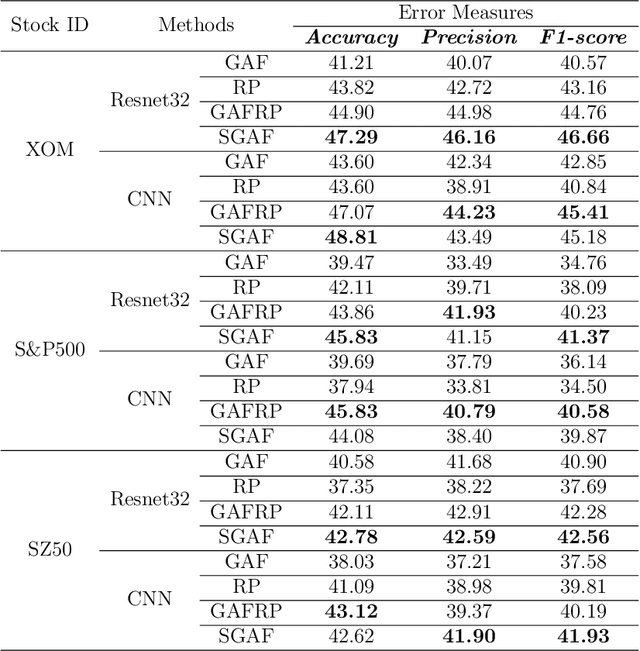
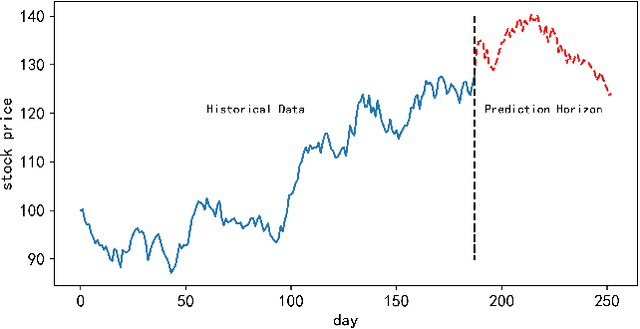
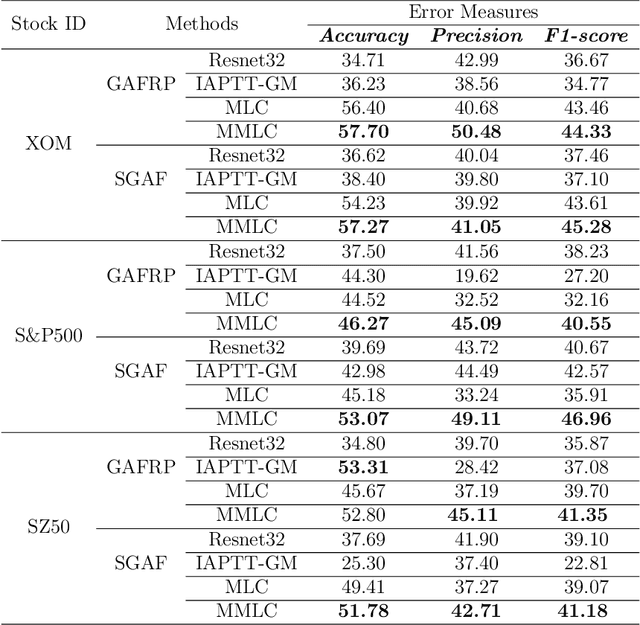
Financial applications such as stock price forecasting, usually face an issue that under the predefined labeling rules, it is hard to accurately predict the directions of stock movement. This is because traditional ways of labeling, taking Triple Barrier Method, for example, usually gives us inaccurate or even corrupted labels. To address this issue, we focus on two main goals. One is that our proposed method can automatically generate correct labels for noisy time series patterns, while at the same time, the method is capable of boosting classification performance on this new labeled dataset. Based on the aforementioned goals, our approach has the following three novelties: First, we fuse a new contrastive learning algorithm into the meta-learning framework to estimate correct labels iteratively when updating the classification model inside. Moreover, we utilize images generated from time series data through Gramian angular field and representative learning. Most important of all, we adopt multi-task learning to forecast temporal-variant labels. In the experiments, we work on 6% clean data and the rest unlabeled data. It is shown that our method is competitive and outperforms a lot compared with benchmarks.
Data-driven Step-to-step Dynamics based Adaptive Control for Robust and Versatile Underactuated Bipedal Robotic Walking
Sep 18, 2022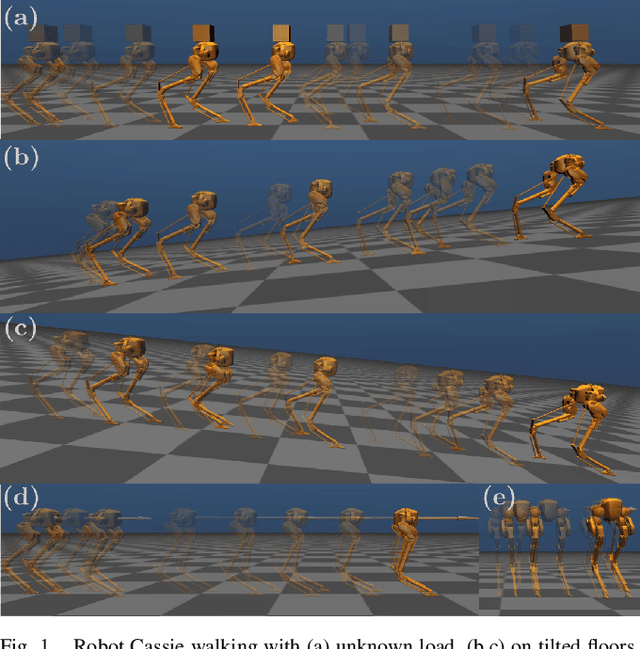
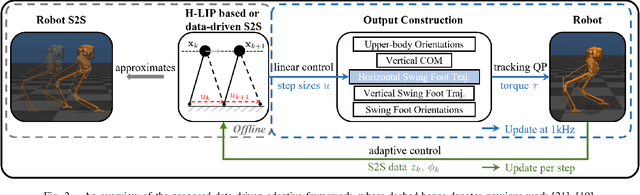
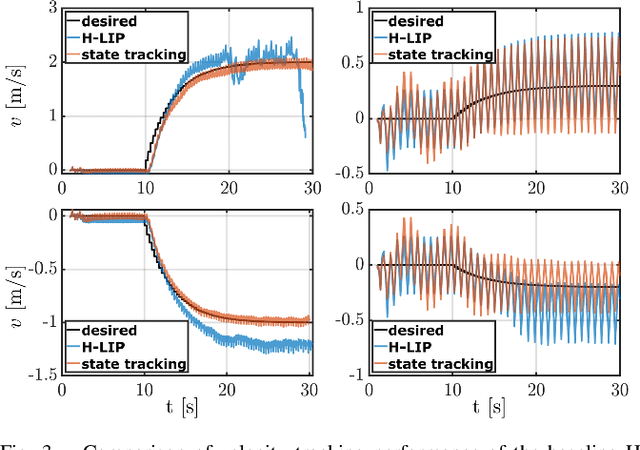
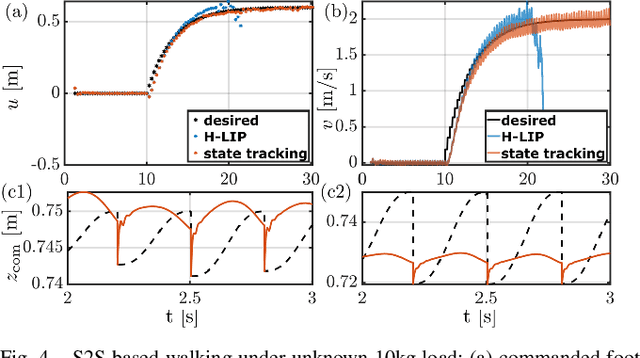
This paper presents a framework for synthesizing bipedal robotic walking that adapts to unknown environment and dynamics error via a data-driven step-to-step (S2S) dynamics model. We begin by synthesizing an S2S controller that stabilizes the walking using foot placement through nominal S2S dynamics from the hybrid linear inverted pendulum (H-LIP) model. Next, a data-driven representation of the S2S dynamics of the robot is learned online via classical adaptive control methods. The desired discrete foot placement on the robot is thereby realized by proper continuous output synthesis capturing the data-driven S2S controller coupled with a low-level tracking controller. The proposed approach is implemented in simulation on an underactuated 3D bipedal robot, Cassie, and improved reference velocity tracking is demonstrated. The proposed approach is also able to realize walking behavior that is robustly adaptive to unknown loads, inaccurate robot models, external disturbance forces, biased velocity estimation, and unknown slopes.
Primitive Graph Learning for Unified Vector Mapping
Jun 28, 2022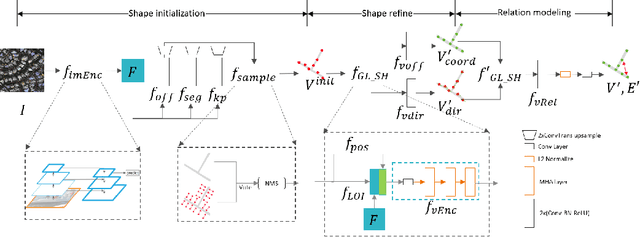


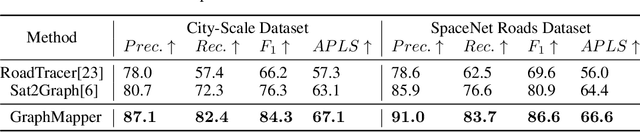
Large-scale vector mapping is important for transportation, city planning, and survey and census. We propose GraphMapper, a unified framework for end-to-end vector map extraction from satellite images. Our key idea is a novel unified representation of shapes of different topologies named "primitive graph", which is a set of shape primitives and their pairwise relationship matrix. Then, we convert vector shape prediction, regularization, and topology reconstruction into a unique primitive graph learning problem. Specifically, GraphMapper is a generic primitive graph learning network based on global shape context modelling through multi-head-attention. An embedding space sorting method is developed for accurate primitive relationship modelling. We empirically demonstrate the effectiveness of GraphMapper on two challenging mapping tasks, building footprint regularization and road network topology reconstruction. Our model outperforms state-of-the-art methods by 8-10% in both tasks on public benchmarks. All code will be publicly available.
Auto-SDE: Learning effective reduced dynamics from data-driven stochastic dynamical systems
May 09, 2022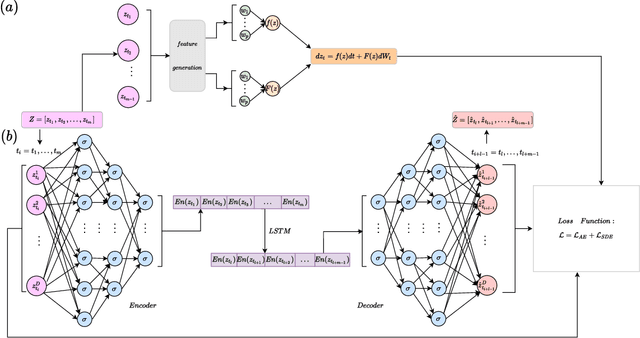
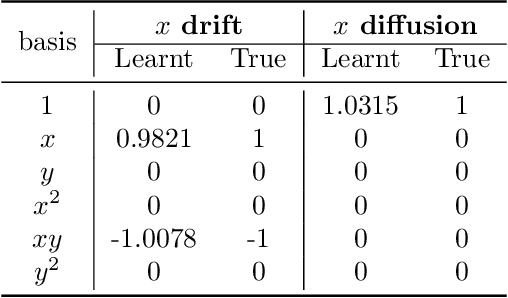
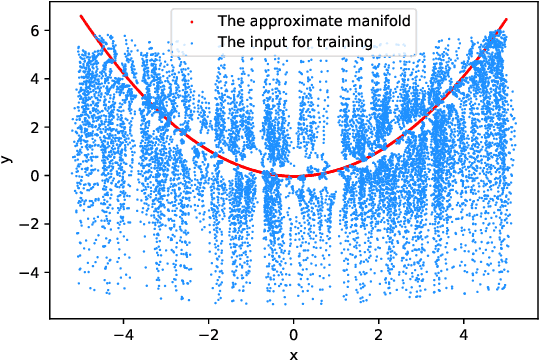
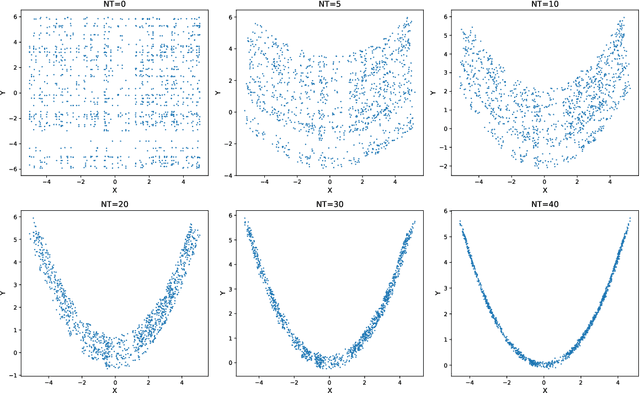
Multiscale stochastic dynamical systems have been widely adopted to scientific and engineering problems due to their capability of depicting complex phenomena in many real world applications. This work is devoted to investigating the effective reduced dynamics for a slow-fast stochastic dynamical system. Given observation data on a short-term period satisfying some unknown slow-fast stochastic system, we propose a novel algorithm including a neural network called Auto-SDE to learn invariant slow manifold. Our approach captures the evolutionary nature of a series of time-dependent autoencoder neural networks with the loss constructed from a discretized stochastic differential equation. Our algorithm is also proved to be accurate, stable and effective through numerical experiments under various evaluation metrics.